

Привет, Хабр! Мы уже о платформе LEGO MINDSTORMS Education EV3. Основные задачи этой платформы — обучение на практических примерах, развитие навыков STEAM и формирование инженерного мышления. В ней можно проводить лабораторные работы по изучению механики и динамики. Лабораторные стенды из кубиков LEGO и утилиты по регистрации и обработке данных делают опыты еще интереснее и нагляднее и помогают детям лучше понять физику. Например, школьники могут собрать данные о температуре плавления и с помощью приложения систематизировать их и представить в виде графика. Но это только начало: сегодня мы расскажем, как дополнить этот набор средой программирования MicroPython и использовать его для обучения робототехнике.
Учим программированию с помощью EV3
Современные школьники хотят видеть красочный результат. Да, им скучно, если программа выводит в консоль числа, и они хотят рассматривать цветные графики, диаграммы и создавать настоящих роботов, движущихся и выполняющих команды. Обычный код тоже кажется детям слишком сложным, поэтому обучение лучше начинать с чего-нибудь полегче.
Базовая среда программирования EV3 создана на основе графического языка LabVIEW и позволяет задавать алгоритмы для робота визуально: команды представлены в виде блоков, которые можно перетаскивать и соединять.
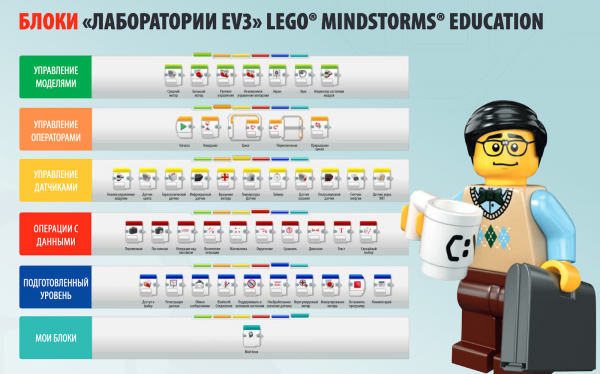
Такой способ хорошо работает, когда нужно показать, как строятся алгоритмы, но он не подходит для программ с большим количеством блоков. При усложнении сценариев необходимо переходить на программирование с помощью кода, но детям трудно сделать этот шаг.
Здесь есть несколько хитростей, одна из которых — показать, что код выполняет те же задачи, что и блоки. В среде EV3 это можно сделать благодаря интеграции с MicroPython: дети создают одну и ту же программу в базовой среде программирования с помощью блоков и на языке Python в Visual Studio Code от Microsoft. Они видят, что оба способа работают одинаково, но кодом решать сложные задачи удобнее.
Переходим на MicroPython
Среда EV3 построена на базе процессора ARM9, и разработчики специально оставили архитектуру открытой. Это решение позволило накатывать альтернативные прошивки, одной из которых стал образ для работы с MicroPython. Он позволяет использовать Python для программирования EV3, что делает работу с набором еще ближе к задачам из реальной жизни.
Чтобы начать работать, нужно скачать на любую microSD-карту, установить ее в микрокомпьютер EV3 и включить его. Затем нужно установить для Visual Studio. И можно приступить к работе.
Программируем первого робота на MycroPython
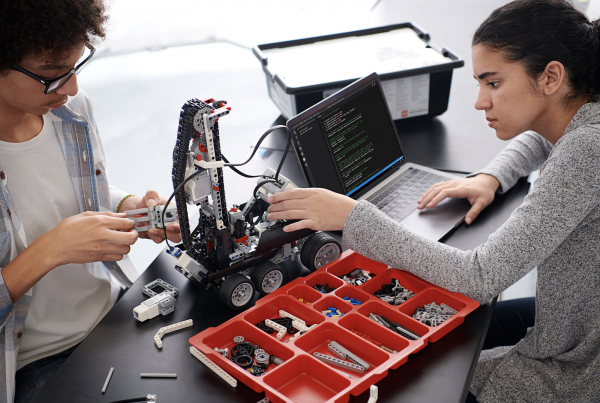
На нашем есть несколько уроков для освоения базовых понятий робототехники. Модели на EV3 знакомят детей с азами, которые используются в самоуправляемых автомобилях, заводских роботах-сборщиках, станках с ЧПУ.
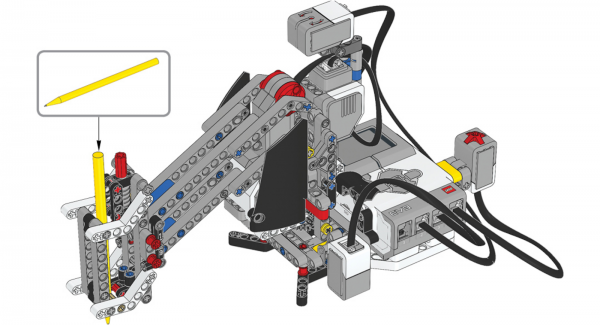
Мы возьмем для примера чертежную машину, которую можно научить рисовать узоры и геометрические фигуры. Данный кейс является упрощенным вариантом взрослых роботов-сварщиков или фрезеровщиков и показывает, как можно использовать EV3 совместно с MicroPython для обучения школьников. А еще чертежная машина может разметить отверстия в печатной плате для папы, но это уже другой уровень, требующий математических расчетов.
Для работы нам понадобятся:
- базовый набор LEGO MINDSTORMS Education EV3;
- большой лист клетчатой бумаги;
- цветные маркеры.
Сборка самого робота есть в , а мы рассмотрим пример программирования.
Сначала инициализируем библиотеку модулей EV3:
#!/usr/bin/env pybricks-micropython
from pybricks import ev3brick as brick
from pybricks.ev3devices import (Motor, TouchSensor, ColorSensor, GyroSensor)
from pybricks.parameters import Port, Stop, Direction, Color, ImageFile
from pybricks.tools import wait
Настраиваем платформу, которая вращает ручку как мотор в порте B. Задаем передаточное отношение двухступенчатой зубчатой передачи с количеством зубьев 20-12-28 соответственно.
turntable_motor = Motor(Port.B, Direction.CLOCKWISE, [20, 12, 28])
Настраиваем подъемный механизм для ручки как мотор в порте C:
seesaw_motor = Motor(Port.C)
Настраиваем гироскоп, измеряющий угол наклона ручки, в порте 2:
gyro_sensor = GyroSensor(Port.S2)
Настраиваем цветовой датчик в порте 3. Датчик используется, чтобы определять белую бумагу под чертежной машиной:
color_sensor = ColorSensor(Port.S3)
Настраиваем датчик касания в порте 4. Робот начинает рисовать, когда датчик нажат:
touch_sensor = TouchSensor(Port.S4)
Определяем функции, которые поднимают и опускают ручку:
def pen_holder_raise():
seesaw_motor.run_target(50, 25, Stop.HOLD)
wait(1000)
def pen_holder_lower():
seesaw_motor.run_target(50, 0, Stop.HOLD)
wait(1000)
Определяем функцию для поворота ручки на заданный угол или до определенного угла:
def pen_holder_turn_to(target_angle):
if target_angle > gyro_sensor.angle():
Если целевой угол больше, чем текущий угол гироскопического датчика, продолжаем движение по часовой стрелке с положительной скоростью:
turntable_motor.run(70)
while gyro_sensor.angle() < target_angle:
pass
elif target_angle < gyro_sensor.angle():
Если целевой угол меньше, чем текущий гироскопического датчика, то двигаемся против часовой стрелки:
turntable_motor.run(-70)
while gyro_sensor.angle() > target_angle:
pass
Останавливаем вращающуюся платформу, когда целевой угол будет достигнут:
turntable_motor.stop(Stop.BRAKE)
Устанавливаем начальное положение ручки в верхнем положении:
pen_holder_raise()
Теперь идет основная часть программы — бесконечный цикл. Сначала EV3 ожидает, когда датчик цвета обнаружит белую бумагу или синюю стартовую клетку, а датчик касания будет нажат. Затем он рисует узор, возвращается в исходное положение и повторяет все заново.
Когда устройство не готово, светодиоды на контроллере принимают красный цвет, и на ЖК-экране отображается изображение «палец вниз»:
while True:
brick.light(Color.RED)
brick.display.image(ImageFile.THUMBS_DOWN)
Дожидаемся, когда датчик цвета считает синий или белый цвет, устанавливаем цвет светодиодов зеленым, отображаем на ЖК-экране изображение «палец вверх» и сообщаем, что устройство готово к работе:
while color_sensor.color() not in (Color.BLUE, Color.WHITE):
wait(10)
brick.light(Color.GREEN)
brick.display.image(ImageFile.THUMBS_UP)
Дожидаемся нажатия датчика касания, присваиваем гироскопическому датчику значение угла 0 и начинаем рисовать:
while not touch_sensor.pressed():
wait(10)
gyro_sensor.reset_angle(0)
pen_holder_turn_to(15)
pen_holder_lower()
pen_holder_turn_to(30)
pen_holder_raise()
pen_holder_turn_to(45)
pen_holder_lower()
pen_holder_turn_to(60)
Поднимаем держатель ручки и возвращаем его в исходное положение:
pen_holder_raise()
pen_holder_turn_to(0)</i>
Вот такая несложная программа у нас получилась. И теперь запускаем ее и смотрим на робота-чертежника в деле.
Что дают такие примеры
EV3 — это инструмент для профориентации в рамках профессий STEM и точка входа в инженерные специальности. Так как на нем можно решать практические задачи, дети получают опыт технических разработок и создания промышленных роботов, учатся моделировать реальные ситуации, понимать программы и анализировать алгоритмы, осваивают базовые конструкции программирования.
Поддержка MicroPython делает платформу EV3 подходящей для обучения в старших классах. Ученики могут попробовать себя в роли программистов на одном из самых популярных современных языков, познакомиться с профессиями, связанными с программированием и инженерным проектированием. Наборы EV3 показывают, что писать код — это не страшно, готовят к серьезным инженерным задачам и помогают сделать первый шаг к освоению технических специальностей. А для тех, кто работает в школе и связан с образованием, у нас подготовлены и учебные материалы. В них детально расписано, какие навыки формируются при выполнении тех или иных задач, и как полученные навыки соотносятся со стандартами обучения.
Источник: habr.com
