

Süni intellekt sahəsindəki inkişafları və insan səviyyəsində kompüter oyunları oynaya bilən neyron şəbəkələrinin qurulması ilə tanınan Google-a məxsus DeepMind şirkəti, MuJoCo (Multi-Joint dynamics with Contact) fizika simulyasiya mühərrikinin açıq mənbə versiyasını elan etdi. Mühərrik ətraf mühitlə qarşılıqlı əlaqədə olan oynaqlı strukturların modelləşdirilməsi üçün nəzərdə tutulub və texnologiyanın hazır cihaz kimi tətbiqindən əvvəl robotların və süni intellekt sistemlərinin hazırlanmasında simulyasiyalar üçün istifadə olunur.
Kod C/C++ dilində yazılıb və Apache 2.0 lisenziyası altında dərc olunacaq. Dəstəklənən platformalar Linux, Windows и macOSLayihə ilə əlaqəli bütün kodların açıq mənbəli olması üçün işlərin 2022-ci ildə başa çatdırılması planlaşdırılır, bundan sonra MuJoCo icma üzvlərinin inkişafda iştirak etməsinə imkan verən açıq inkişaf modelinə keçəcək.
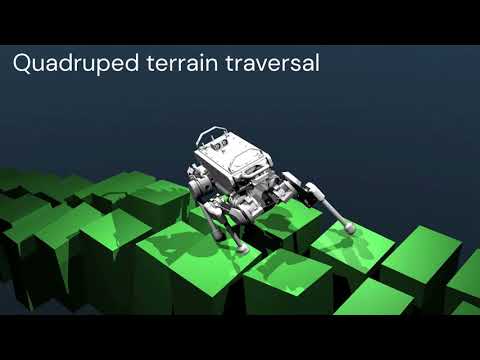
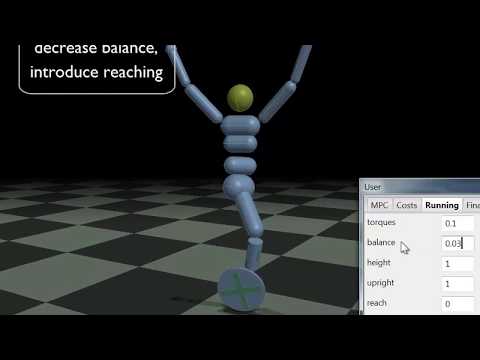
MuJoCo, robotların, biomexaniki cihazların və maşın öyrənmə sistemlərinin tədqiqi və inkişafında, eləcə də qrafika, animasiya və kompüter oyunlarının yaradılmasında istifadə edilə bilən ümumi təyinatlı fizika simulyasiya mühərrikini tətbiq edən bir kitabxanadır. Simulyasiya mühərriki maksimum performans üçün optimallaşdırılmışdır və yüksək dəqiqliyi və geniş modelləşdirmə imkanlarını qoruyarkən obyektlərin aşağı səviyyəli manipulyasiyasına imkan verir.
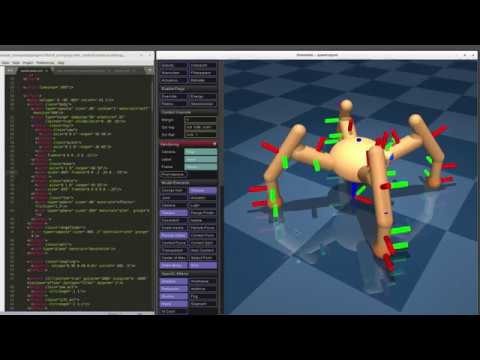
Modellər, xüsusi optimallaşdırma kompilyatoru istifadə edilərək tərtib edilən XML əsaslı bir dil olan MJCF səhnə təsviri dili ilə müəyyən edilir. MJCF-ə əlavə olaraq, mühərrik faylların universal URDF-də (Vahid Robot Təsvir Formatı) yüklənməsini dəstəkləyir. MuJoCo həmçinin OpenGL istifadə edərək simulyasiya prosesinin interaktiv 3D vizuallaşdırılması və nəticələrin göstərilməsi üçün qrafik interfeys təmin edir.
Əsas xüsusiyyətlər:
- Birləşmələrin pozulması istisna olmaqla, ümumiləşdirilmiş koordinatlarda simulyasiya.
- Əks dinamika, hətta təmasda olduqda da müəyyən edilir.
- Davamlı zamanda məhdudiyyətlərin vahid formalaşdırılması üçün qabarıq proqramlaşdırmadan istifadə.
- Yumşaq toxunma və quru sürtünmə daxil olmaqla müxtəlif məhdudiyyətləri təyin etmək imkanı.
- Hissəcik sistemlərinin, parçaların, iplərin və yumşaq obyektlərin simulyasiyası.
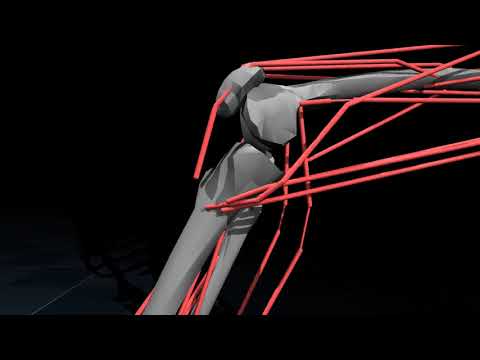
- Mühərriklər, silindrlər, əzələlər, tendonlar və krank mexanizmləri daxil olmaqla, icraedici elementlər (hərəkətvericilər).
- Nyuton metodlarına əsaslanan həlledicilər, konjugat gradientlər və Gauss-Seidel.
- Piramidal və ya elliptik sürtünmə konuslarından istifadə etmək imkanı.
- Eyler və ya Runge-Kuttanın ədədi inteqrasiya üsullarının seçimindən istifadə.
- Sonlu fərqlər üsulu ilə çox yivli diskretləşdirmə və yaxınlaşma.

Mənbə: opennet.ru
