

Публікую першы раздзел лекцый па тэорыі аўтаматычнага кіравання, пасля якіх ваша жыццё ўжо ніколі не будзе ранейшай.
Лекцыі па курсе "Кіраванне Тэхнічнымі Сістэмамі", чытае Казлоў Алег Сцяпанавіч на кафедры "Ядзерныя рэактары і энергетычныя ўстаноўкі", факультэта "Энергамашынабудавання" МДТУ ім. Н.Э. Баумана. Завошта яму вялікая падзяка.
Дадзеныя лекцыі толькі рыхтуюцца да публікацыі ў выглядзе кнігі, а паколькі тут ёсць спецыялісты па ТАУ, студэнты і проста цікавяцца прадметам, то любая крытыка вітаецца.

1. Асноўныя паняцці тэорыі кіравання тэхнічнымі сістэмамі
1.1. Мэты, прынцыпы кіравання, віды сістэм кіравання, асноўныя азначэнні, прыклады
Развіццё і ўдасканаленне прамысловай вытворчасці (энергетыкі, транспарта, машынабудавання, касмічнай тэхнікі і г.д.) патрабуе бесперапыннага павелічэння прадукцыйнасці машын і агрэгатаў, павышэння якасці прадукцыі, зніжэння сабекошту і, асабліва ў атамнай энергетыцы, рэзкага павышэння бяспекі (ядзернай, радыяцыйнай і т.д. .д.) эксплуатацыі АЭС і ядзерных установак.
Рэалізацыя пастаўленых мэт немагчыма без укаранення сучасных сістэм кіравання, уключаючы як аўтаматызаваныя (з удзелам чалавека-аператара), так і аўтаматычныя (без удзелу чалавека-аператара) сістэмы кіравання (СУ).
вызначэнне: Кіраванне - гэта такая арганізацыя таго ці іншага тэхналагічнага працэсу, якая забяспечвае дасягненне пастаўленай мэты.
Тэорыя кіравання з'яўляецца раздзелам сучаснай навукі і тэхнікі. Яна грунтуецца (засноўваецца) як на фундаментальных (агульнанавуковых) дысцыплінах (напрыклад, матэматыка, фізіка, хімія і г.д.), так і на прыкладных дысцыплінах (электроніка, мікрапрацэсарная тэхніка, праграмаванне і г.д.).
Любы працэс кіравання (аўтаматычнага) складаецца з наступных асноўных этапаў (элементаў):
- атрыманне інфармацыі аб задачы кіравання;
- атрыманне інфармацыі аб выніку кіравання;
- аналіз атрыманай інфармацыі;
- выкананне рашэння (уздзеянне на аб'ект кіравання).
Для рэалізацыі Працэсу Упраўлення сістэма кіравання (СУ) павінна мець:
- крыніцы інфармацыі аб задачы кіравання;
- крыніцы інфармацыі аб выніках кіравання (розныя датчыкі, вымяральныя прылады, дэтэктары і г.д.);
- прылады для аналізу атрыманай інфармацыі і выпрацоўкі рашэння;
- выканаўчыя прылады, якія ўздзейнічаюць на Аб'ект Упраўлення, якія змяшчаюць: рэгулятар, рухавікі, узмацняльна-пераўтваральныя прылады і г.д.
вызначэнне: Калі сістэма кіравання (СУ) утрымоўвае ўсе пералічаныя вышэй часткі, то яна з'яўляецца замкнёнай.
вызначэнне: Упраўленне тэхнічным аб'ектам з выкарыстаннем інфармацыі аб выніках кіравання называецца прынцыпам зваротнай сувязі.
Схематычна такая сістэма кіравання можа быць прадстаўлена ў выглядзе:
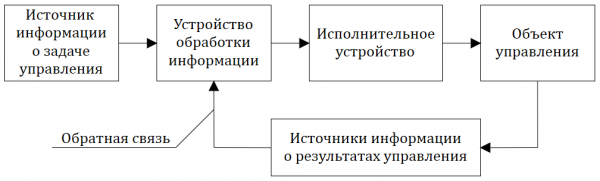
Мал. 1.1.1 - Структура сістэмы кіравання (СУ)
Калі сістэма кіравання (СУ) мае структурную схему, выгляд якой адпавядае мал. 1.1.1, і функцыянуе (працуе) без удзелу чалавека (аператара), то яна называецца сістэмай аўтаматычнага кіравання (САУ).
Калі СУ функцыянуе з удзелам чалавека (аператара), то яна называецца аўтаматызаванай СУ.
Калі Упраўленне забяспечвае зададзены закон змены аб'екта ў часе незалежна ад вынікаў кіравання, то такое кіраванне здзяйсняецца па растуленым цыкле, а само кіраванне завецца праграмным кіраваннем.
Да сістэм, якія працуюць па растуленым цыкле, ставяцца прамысловыя аўтаматы (канвеерныя лініі, ротарныя лініі і г.д.), станкі з лікавым праграмным кіраваннем (ЧПУ): гл. прыклад на мал. 1.1.2.
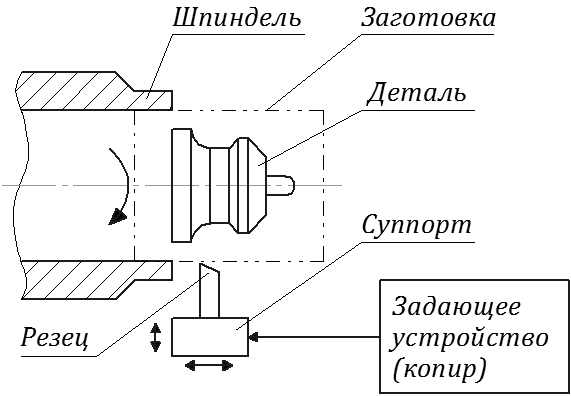
Мал.1.1.2 - Прыклад праграмнага кіравання
Якая задае прылада можа быць, напрыклад, і "капірам".
Паколькі ў дадзеным прыкладзе няма датчыкаў (вымяральнікаў), якія кантралююць якая вырабляецца дэталь, то калі, напрыклад, разец быў усталяваны няправільна або зламаўся, то пастаўленая мэта (выраб дэталі) не можа быць дасягнута (рэалізаваная). Звычайна ў сістэмах падобнага тыпу неабходны выходны кантроль, які будзе толькі фіксаваць адхіленне памераў і формы дэталі ад жаданай.
Аўтаматычныя сістэмы кіравання падзяляюцца на 3 тыпы:
- сістэмы аўтаматычнага кіравання (САУ);
- сістэмы аўтаматычнага рэгулявання (САР);
- сачыльныя сістэмы (СС).
САР і СС з'яўляюцца падмноствамі САУ ==>  .
.
Азначэнне: Аўтаматычная сістэма кіравання, якая забяспечвае сталасць які-небудзь фізічнай велічыні (групы велічынь) у аб'екце кіравання завецца сістэмай аўтаматычнага рэгулявання (САР).
Сістэмы аўтаматычнага рэгулявання (САР) - найбольш распаўсюджаны тып сістэм аўтаматычнага кіравання.
Першы ў свеце аўтаматычны рэгулятар (18-е стагоддзе) - рэгулятар Уатта. Дадзеная схема (гл. Мал. 1.1.3) рэалізаваная Уат ў Англіі для падтрымання пастаяннай хуткасці кручэння колы паравой машыны і, адпаведна, для падтрымання сталасці хуткасці кручэння (руху) шківа (рамяня) трансмісіі.
У дадзенай схеме адчувальнымі элементамі (Вымяральнымі датчыкамі) з'яўляюцца "грузы" (сферы). "Грузы" (сферы) таксама "прымушаюць" перамяшчацца каромысел і затым засаўку. Таму дадзеную сістэму можна аднесці да сістэмы прамога рэгулявання, а рэгулятар - да рэгулятару прамога дзеяння, так як ён адначасова выконвае функцыі і "вымяральніка" і "рэгулятара".
У рэгулятарах прамога дзеяння дадатковай крыніцы энергіі для перасоўвання які рэгулюе органа не патрабуецца.
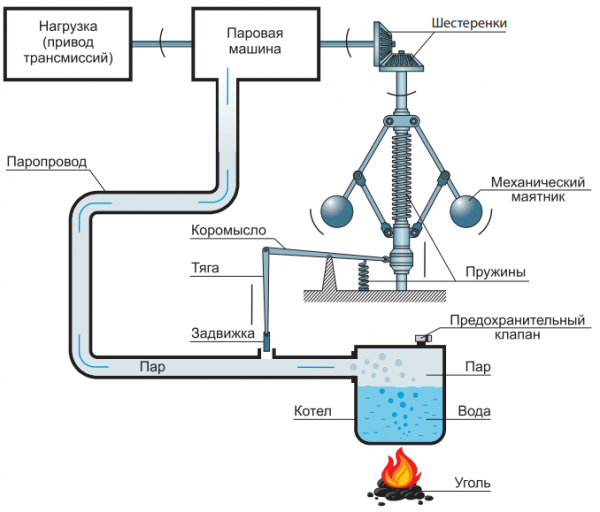
Мал. 1.1.3 - Схема аўтаматычнага рэгулятара Уатта
У сістэмах непрамога рэгулявання неабходна прысутнасць (наяўнасць) узмацняльніка (напрыклад, магутнасці), дадатковага выканаўчага механізму, які змяшчае, напрыклад, электрарухавік, серводвигатель, гідрапрывад і г.д.
Прыкладам САУ (сістэмы аўтаматычнага кіравання), у поўным сэнсе гэтага вызначэння, можа служыць сістэма кіравання, якая забяспечвае выснову ракеты на арбіту, дзе кіраванай велічынёй можа быць, напрыклад, кут паміж воссю ракеты і нармаллю да Зямлі ==> гл. Мал. 1.1.4.а і мал. 1.1.4.б
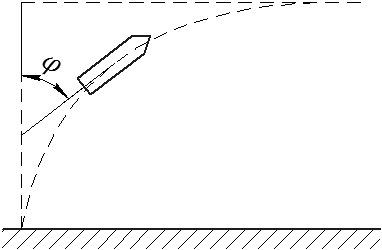
Мал. 1.1.4 (а)
Мал. 1.1.4 (б)
1.2. Структура сістэм кіравання: простыя і шматмерныя сістэмы
У тэорыі Кіравання Тэхнічнымі Сістэмамі любую сістэму прынята падзяляць на набор звёнаў злучаных у сеткавыя структуры. У найпростым выпадку сістэма змяшчае адно звяно, на ўваход якога падаецца ўваходны ўздзеянне (уваход), на ўваходзе атрымліваецца водгук сістэмы (выхад).
У тэорыі Упраўлення Тэхнічнымі Сістэмам выкарыстоўваюць 2 асноўных спосабу прадстаўлення звёнаў сістэм кіравання:
- У зменных "ўваход-выхад";
- У зменных стану (больш падрабязна гл. Раздзелы 6 ... 7).
Прадстаўленне ў зменных "уваход-выхад" звычайна выкарыстоўваецца для апісання адносна простых сістэм, мелых адзін "уваход" (адно кіравальнае ўздзеянне) і адзін "выхад" (адна рэгуляваная велічыня, гл. малюнак 1.2.1).
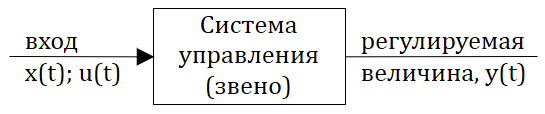
Мал. 1.2.1 - Схематычнае ўяўленне простай сістэмы кіравання
Звычайна такое апісанне выкарыстоўваецца для тэхнічна нескладаных САУ (сістэм аўтаматычнага кіравання).
У апошні час шырокае распаўсюджванне мае ўяўленне ў зменных станы, асабліва для тэхнічна складаных сістэм, у тым ліку і для шматмерных САУ. На мал. 1.2.2 прыведзена схематычнае ўяўленне шматмернай сістэмы аўтаматычнага кіравання, дзе u1(t)…um(t) - Кіраўнікі ўздзеяння (вектар кіравання), y1(t)…yp(t) - Рэгулёўныя параметры САУ (вектар выхаду).
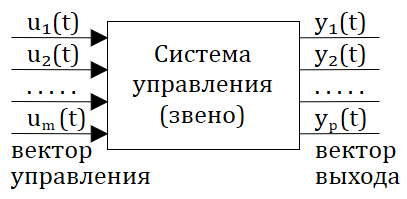
Мал. 1.2.2 - Схематычнае прадстаўленне шматмернай сістэмы кіравання
Разгледзім больш дэталёва структуру САУ, прадстаўленую ў зменных "уваход-выхад" і якая мае адзін уваход (уваходнае ці якое задае, ці кіравальнае ўздзеянне) і адно выйсце (выходнае ўздзеянне ці кіраваная (ці рэгуляваная) зменная).
Выкажам здагадку, што структурная схема такой САУ складаецца з некаторага ліку элементаў (звёнаў). Групуючы звёны па функцыянальным прынцыпе (што звёны робяць), структурную схему САУ можна прывесці да наступнага тыпавога ўвазе:
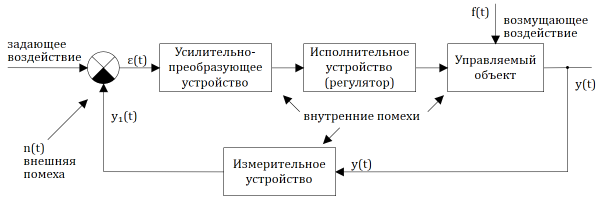
Мал. 1.2.3 - Структурная схема сістэмы аўтаматычнага кіравання
Сімвалам ε(t) ці зменнай ε(t) пазначаецца разузгадненне (памылка) на выхадзе параўноўвальнага прылады, якое можа "працаваць" у рэжыме як простых параўнальных арыфметычных аперацый (часцей за ўсё адніманне, радзей складанне), так і больш складаных параўнальных аперацый (працэдур).
Так як y1(t) = y(t)*k1, Дзе k1 - Каэфіцыент узмацнення, то ==>
ε(t) = x(t) - y1(t) = x(t) - k1*y(t)
Задача сістэмы кіравання складаецца ў тым (калі яна ўстойлівая), каб "працаваць" на знішчэнне разузгаднення (памылкі) ε(t), г.зн. ==> ε(t) → 0.
Варта адзначыць, што на сістэму кіравання дзейнічаюць як вонкавыя ўздзеянні (кіравальнае, якое абурае, перашкоды), так і ўнутраныя перашкоды. Перашкода адрозніваецца ад уздзеяння стахастычнасцю (выпадковасцю) свайго існавання, тады як уздзеянне амаль заўсёды дэтэрмінавана.
Для абазначэння кіраўніка (які задае ўздзеянне) будзем выкарыстоўваць альбо х (т), Альбо і (т).
1.3. Асноўныя законы кіравання
Калі вярнуцца да апошняга малюнка (структурная схема САУ на мал. 1.2.3), тое неабходна "расшыфраваць" роля, якую гуляе ўзмацняльна-пераўтваральная прылада (якія функцыі яно выконвае).
Калі ўзмацняльна-пераўтваральная прылада (УПУ) выконвае толькі ўзмацненне (або паслабленне) сігналу разузгаднення ε(t), а менавіта:  , Дзе
, Дзе  - каэфіцыент прапарцыйнасці (у прыватным выпадку
- каэфіцыент прапарцыйнасці (у прыватным выпадку  = Const), то такі рэжым кіравання замкнёнай САУ называецца рэжымам прапарцыйнага кіравання (П-кіраванне).
= Const), то такі рэжым кіравання замкнёнай САУ называецца рэжымам прапарцыйнага кіравання (П-кіраванне).
Калі УПУ выконвае фармаванне выходнага сігналу ε1(t), прапарцыйнага памылцы ε(t) і інтэгралу ад ε(t), г.зн.  , то такі рэжым кіравання называецца прапарцыйна-інгрэруючым (ПІ-кіраванне). ==>
, то такі рэжым кіравання называецца прапарцыйна-інгрэруючым (ПІ-кіраванне). ==>  , Дзе b - каэфіцыент прапарцыйнасці (у прыватным выпадку b = Const).
, Дзе b - каэфіцыент прапарцыйнасці (у прыватным выпадку b = Const).
Звычайна ПІ-кіраванне выкарыстоўваецца для павышэння дакладнасці кіравання (рэгулявання).
Калі УПУ фармуе выходны сігнал ε1(t), прапарцыйны памылцы ε(t) і яе вытворнай, то такі рэжым завецца прапарцыйна-дыферэнцыруючым (ПД-кіраванне): ==> 
Звычайна выкарыстанне ПД-кіравання павялічвае хуткадзейнасць САУ
Калі УПУ фармуе выходны сігнал ε1(t), прапарцыйны памылцы ε(t), яе вытворнай, і інтэгралу ад памылкі ==>  , то такі рэжым называеццато такі рэжым кіравання называецца прапарцыйна-інтэгральна-дыферэнцыруючым рэжымам кіравання (ПІД-кіраванне).
, то такі рэжым называеццато такі рэжым кіравання называецца прапарцыйна-інтэгральна-дыферэнцыруючым рэжымам кіравання (ПІД-кіраванне).
ПІД-кіраванне дазваляе часцяком забяспечыць "добрую" дакладнасць кіравання пры "добрым" хуткадзейнасці
1.4. Класіфікацыя сістэм аўтаматычнага кіравання
1.4.1. Класіфікацыя па выглядзе матэматычнага апісання
Па выглядзе матэматычнага апісання (раўнанняў дынамікі і статыкі) сістэмы аўтаматычнага кіравання (САУ) падпадзяляюцца на лінейныя и нелінейныя сістэмы (САУ або САР).
Кожны "падклас" (лінейных і нелінейных) падзяляецца на яшчэ шэраг "падкласаў". Напрыклад, лінейныя САУ (САР) маюць адрозненні па выглядзе матэматычнага апісання.
Паколькі ў гэтым семестры будуць разглядацца дынамічныя ўласцівасці толькі лінейных сістэм аўтаматычнага кіравання (рэгулявання), то ніжэй прывядзем класіфікацыю па выглядзе матэматычнага апісання для лінейных САУ (САР):
1) Лінейныя сістэмы аўтаматычнага кіравання, апісваныя ў зменных «уваход-выхад» звычайнымі дыферэнцыяльнымі раўнаннямі (ОДУ) з пастаяннымі каэфіцыентамі:


дзе х (т) – уваходнае ўздзеянне; y(t) – выходнае ўздзеянне (рэгулюемая велічыня).
Калі выкарыстоўваць аператарную ("кампактную") форму запісу лінейнага АДУ, то раўнанне (1.4.1) можна прадставіць у наступным выглядзе:

дзе, p = d/dt - аператар дыферэнцыявання; L(p), N(p) - Адпаведныя лінейныя дыферэнцыяльныя аператары, якія роўныя:


2) Лінейныя сістэмы аўтаматычнага кіравання, якія апісваюцца лінейнымі звычайнымі дыферэнцыяльнымі раўнаннямі (ОДУ) з зменнымі (у часе) каэфіцыентамі:


У агульным выпадку такія сістэмы можна аднесці і да класа нелінейных САУ (САР).
3) Лінейныя сістэмы аўтаматычнага кіравання, якія апісваюцца лінейнымі рознаснымі раўнаннямі:


дзе f(…) - лінейная функцыя аргументаў; k = 1, 2, 3… - цэлыя лікі; Δt - інтэрвал квантавання (інтэрвал дыскрэтызацыі).
Раўнанне (1.4.4) можна прадставіць у "кампактнай" форме запісу:

Звычайна такое апісанне лінейных САУ (САР) выкарыстоўваецца ў лічбавых сістэмах кіравання (з выкарыстаннем ЭВМ).
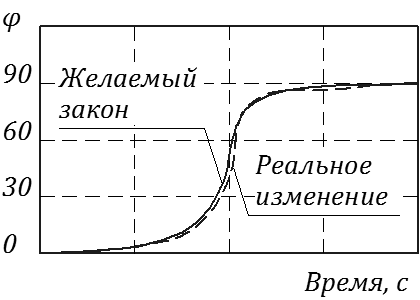
4) Лінейныя сістэмы аўтаматычнага кіравання з запазненнем:

дзе L(p), N(p) - лінейныя дыферэнцыяльныя аператары; τ - Час запазнення або пастаянная запазнення.
Калі аператары L(p) и N(p) выраджаюцца (L(p) = 1; N(p) = 1), то раўнанне (1.4.6) адпавядае матэматычнаму апісанню дынамікі звяна ідэальнага запазнення:

а графічная ілюстрацыя яго ўласцівасцей прыўдзена на мал. 1.4.1
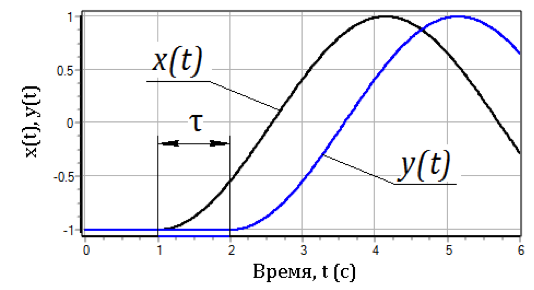
Мал. 1.4.1 — Графікі ўваходу і выхаду звяна ідэальнага запазнення
5) Лінейныя сістэмы аўтаматычнага кіравання, якія апісваюцца лінейнымі дыферэнцыяльнымі ўраўненні ў прыватных вытворных. Нярэдка такія САУ завуць размеркаванымі сістэмамі кіравання. ==> «Абстрактны» прыклад такога апісання:

Сістэма раўнанняў (1.4.7) апісвае дынаміку лінейна размеркаванай САУ, г.зн. рэгуляваная велічыня залежыць не толькі ад часу, але і ад адной прасторавай каардынаты.
Калі сістэма кіравання ўяўляе сабой "прасторавы" аб'ект, то ==>

дзе  залежыць ад часу і прасторавых каардынат, якiя вызначаюцца радыусам-вектарам
залежыць ад часу і прасторавых каардынат, якiя вызначаюцца радыусам-вектарам 
6) САУ, якія апісваюцца сістэмамі АДУ, або сістэмамі рознасных ураўненняў, або сістэмамі ўраўненняў у прыватных вытворных ==> і гэтак далей…
Аналагічную класіфікацыю можна прапанаваць і для нелінейных САУ (САР).
Для лінейных сістэм выконваюцца наступныя патрабаванні:
- лінейнасць статычнай характарыстыкі САУ;
- лінейнасць раўнання дынамікі, г.зн. зменныя ў раўнанне дынамікі ўваходзяць толькі ў лінейнай камбінацыі.
Статычнай характарыстыкай называецца залежнасць выхаду ад велічыні ўваходнага ўздзеяння ў які ўсталяваўся рэжыме (калі ўсе пераходныя працэсы згаслі).
Для сістэм, апісваных лінейнымі звычайнымі дыферэнцыяльнымі ўраўненнямі з пастаяннымі каэфіцыентамі статычная характарыстыка атрымліваецца з раўнання дынамікі (1.4.1) прыраўноўваннем нулю ўсіх нестацыянарных членаў ==>

На рис.1.4.2 прадстаўлены прыклады лінейнай і нелінейных статычных характарыстык сістэм аўтаматычнага кіравання (рэгулявання).
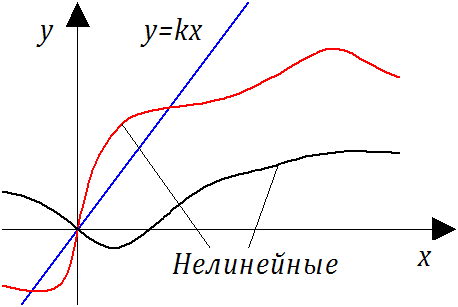
Мал. 1.4.2 - Прыклады статычных лянейных і нелінейных харктэрыстык
Нелінейнасць членаў, якія змяшчаюць вытворныя па часе ва ўраўненнях дынамікі, можа ўзнікнуць пры выкарыстанні нелінейных матэматычных аперацый (*, /,  ,
,  , sin, ln і г.д.). Напрыклад, разглядаючы раўнанне дынамікі некаторай "абстрактнай" САУ
, sin, ln і г.д.). Напрыклад, разглядаючы раўнанне дынамікі некаторай "абстрактнай" САУ

адзначым, што ў гэтым раўнанні пры лінейнай статычнай характарыстыкі  другое і трэцяе складнікі (дынамічныя члены) у левай частцы раўнання - нелінейныя, таму САУ, апісваная падобным раўнаннем, з'яўляецца нелінейнай ў дынамічным плане.
другое і трэцяе складнікі (дынамічныя члены) у левай частцы раўнання - нелінейныя, таму САУ, апісваная падобным раўнаннем, з'яўляецца нелінейнай ў дынамічным плане.
1.4.2. Класіфікацыя па характары перадаюцца сігналаў
Па характары перадаюцца сігналаў сістэмы аўтаматычнага кіравання (або рэгуляванні) падпадзяляюцца:
- бесперапынныя сістэмы (сістэмы бесперапыннага дзеяння);
- рэлейныя сістэмы (сістэмы рэлейнага дзеяння);
- сістэмы дыскрэтнага дзеяння (імпульсныя і лічбавыя).
Сістэмай бесперапыннага дзеянні называецца такая САУ, у кожным са звёнаў якой бесперапыннаму змене ўваходнага сігналу ў часе адпавядае бесперапыннае змена выходнага сігналу, пры гэтым закон змены выходнага сігналу можа быць адвольным. Каб САУ была бесперапыннай, неабходна, каб статычныя характарыстыкі ўсіх звёнаў былі бесперапыннымі.
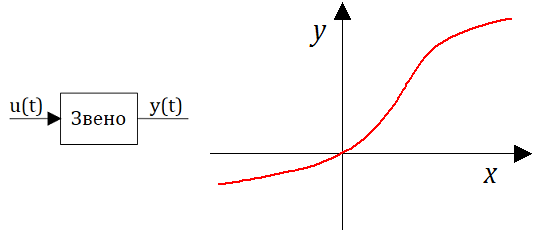
Мал. 1.4.3 - Прыклад бесперапыннай сістэмы
Сістэмай рэлейнага дзеянні завецца САУ, у якой хоць бы ў адным звяне пры бесперапыннай змене ўваходнай велічыні выходная велічыня ў некаторыя моманты працэсу кіравання змяняецца "скокам" у залежнасці ад велічыні ўваходнага сігналу. Статычная характарыстыка такога звяна мае кропкі разрыву або залому з разрывам.
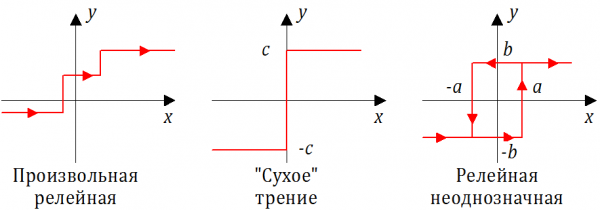
Мал. 1.4.4 - Прыклады рэлейных статычных характарыстык
Сістэмай дыскрэтнага дзеянні завецца сістэма, у якой хоць бы ў адным звяне пры бесперапыннай змене ўваходнай велічыні выходная велічыня мае выгляд асобных імпульсаў, якія з'яўляюцца праз некаторы прамежак часу.
Звяно, якое пераўтварае бесперапынны сігнал у дыскрэтны сігнал, называецца імпульсным. Падобны выгляд перадаюцца сігналаў мае месца ў САУ з ЭВМ ці кантролерам.
Найбольш часта рэалізуюцца наступныя метады (алгарытмы) пераўтварэнні бесперапыннага ўваходнага сігналу ў імпульсны выходны сігнал:
- амплітудна-імпульсная мадуляцыя (АІМ);
- шыротна-імпульсная мадуляцыя (ШІМ).
На мал. 1.4.5 прадстаўлена графічная ілюстрацыя алгарытму амплітудна-імпульснай мадуляцыі (АІМ). У верхняй частцы мал. прадстаўлена часовая залежнасць х (т) - сігналу на ўваходзе у імпульснае звяно. Выходны сігнал імпульснага блока (звяна) y(t) – паслядоўнасць прастакутных імпульсаў, якія з'яўляюцца з пастаянным перыядам квантавання Δt (гл. ніжнюю частку мал.). Працягласць імпульсаў – аднолькавая і роўна Δ. Амплітуда імпульсу на вынахадзе блока прапарцыйная якая адпавядае велічыні бесперапыннага сігналу x(t) на ўваходзе дадзенага блока.
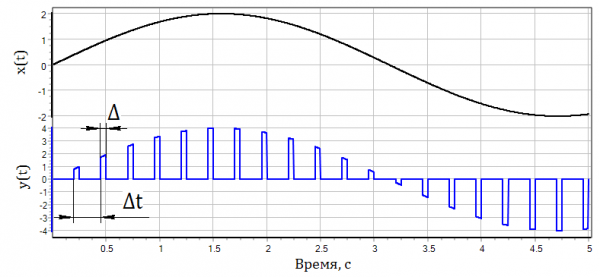
Мал. 1.4.5 - Рэалізацыя амплітудна-імпульснай мадуляцыі
Дадзены метад імпульснай мадуляцыі быў вельмі распаўсюджаны ў электронна-вымяральнай апаратуры сістэм кіравання і абароны (СУЗ) ядзерных энергетычных установак (ЯЭУ) у 70-х...80-х гадах мінулага стагоддзя.
На мал. 1.4.6 прадстаўлена графічная ілюстрацыя алгарытму шыротна-імпульснай мадуляцыі (ШІМ). У верхняй частцы мал. 1.14 прадстаўлена часовая залежнасць х (т) - сігналу на ўваходзе ў імпульснае звяно. Выходны сігнал імпульснага блока (звяна) y(t) – паслядоўнасць прамавугольных імпульсаў, якія з'яўляюцца з пастаянным перыядам квантавання. Δt (гл. ніжнюю частку мал. 1.14). Амплітуда ўсіх імпульсаў - аднолькавая. Працягласць імпульсу Δt на выхадзе блока прапарцыйная адпаведнай велічыні бесперапыннага сігналу х (т) на ўваходзе імпульснага блока.
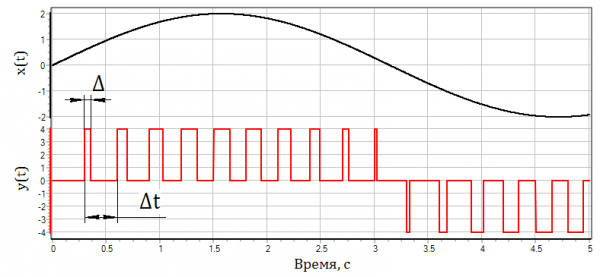
Мал. 1.4.6 - Рэалізацыя шыротна-імпульснай мадуляцыі
Дадзены метад імпульснай мадуляцыі ў наш час з'яўляецца найболей распаўсюджаным у электронна-вымяральнай апаратуры сістэм кіравання і абароны (СУЗ) ядзерных энергетычных усталёвак (ЯЭУ) і САУ іншых тэхнічных сістэм.
Завяршаючы дадзены падраздзел, неабходна заўважыць, што калі характэрныя пастаянныя часу ў іншых звёнах САУ (САР) істотна больш Δt (на парадкі), то імпульсная сістэма можа лічыцца бесперапыннай сістэмай аўтаматычнага кіравання (пры выкарыстанні як АІМ, так і ШІМ).
1.4.3. Класіфікацыя па характары кіравання
Па характары працэсаў кіравання сістэмы аўтаматычнага кіравання падзяляюцца на наступныя тыпы:
- дэтэрмінаваныя САУ, у якіх уваходнаму сігналу адназначна можа быць пастаўлены ў адпаведнасць выходны сігнал (і наадварот);
- стахастычныя САУ (статыстычныя, імавернасныя), у якіх на дадзены ўваходны сігнал САУ "адказвае" выпадковым (стахастычным) выходным сігналам.
Выходны стахастычны сігнал характарызуецца:
- законам размеркавання;
- матэматычным чаканнем (сярэднім значэннем);
- дысперсіяй (сярэднеквадратычным адхіленнем).
Выпадковасць характару працэсу кіравання звычайна назіраецца ў істотна нелінейных САР як з пункту гледжання статычнай характарыстыкі, так і з пункту гледжання (нават у большай ступені) нелінейнасці дынамічных чальцоў у раўнаннях дынамікі.
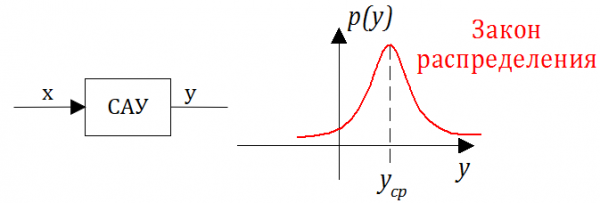
Мал. 1.4.7 - Размеркаванне выходны велічыні стахастычнай САУ
Акрамя прыведзеных асноўных відаў класіфікацыі сістэм кіравання, існуюць і іншыя класіфікацыі. Напрыклад, класіфікацыя можа праводзіцца па метадзе кіравання і засноўвацца на ўзаемадзеянні з навакольным асяроддзем і магчымасці адаптацыі САУ да змены параметраў навакольнага асяроддзя. Сістэмы дзеляцца на два вялікія класы:
1) Звычайныя (несаманаладжвальныя) СУ без адаптацыі; гэтыя сістэмы ставяцца да разраду простых, якія не змяняюць сваю структуру ў працэсе кіравання. Яны найбольш распрацаваны і шырока прымяняюцца. Звычайныя СУ падзяляюцца на тры падкласы: растуленыя, замкнёныя і камбінаваныя сістэмы кіравання.
2) саманаладжвальныя (адаптыўныя) СУ. У гэтых сістэмах пры змене вонкавых умоў ці характарыстак аб'екта рэгулявання адбываецца аўтаматычнае (загадзя не зададзенае) змена параметраў кіравальнай прылады за рахунак змены каэфіцыентаў СУ, структуры СУ або нават уводзіны новых элементаў.
Іншы прыклад класіфікацыі: па іерархічнай прыкмеце (аднаузроўневыя, двухузроўневыя, шматузроўневыя).
Толькі зарэгістраваныя карыстачы могуць удзельнічаць у апытанні. , Калі ласка.
Працягнуць публікацыю лекцый па УТС?
-
88,7%Так118
-
7,5%Няма10
-
3,8%Не ведаю5
Прагаласавалі 133 карыстальніка. Устрымаліся 10 карыстальнікаў.
Крыніца: habr.com
