

Привет Хабр. Наверное каждый, кто хоть раз встречал или провожал родственников или друзей на самолет, пользовался бесплатным сервисом Flightradar24. Это весьма удобный способ отслеживания положения самолета в реальном времени.
В был описан принцип работы такого онлайн-сервиса. Сейчас мы пойдем дальше, и выясним, какие данные передаются и принимаются от воздушного судна к приемной станции, и декодируем их самостоятельно с помощью Python.
История
Очевидно, что данные о самолетах передаются не для того, чтобы пользователи видели их на своих смартфонах. Система называется ADS–B (Automatic dependent surveillance—broadcast), и служит для автоматической передачи информации о воздушном судне в диспетчерский центр — передаются его идентификатор, координаты, направление, скорость, высота и прочие данные. Ранее, до появления таких систем, диспетчер мог видеть лишь точку на радаре. Этого стало недостаточно, когда самолетов стало слишком много.
Технически, ADS-B состоит из передатчика на воздушном судне, который периодически посылает пакеты с информацией на достаточно высокой частоте 1090 МГц (есть и другие режимы, но нам они не так интересены, т.к. координаты передаются только здесь). Разумеется, кроме передатчика, есть и приемник где-то в аэропорту, но для нас, как для пользователей, интересен приемник наш собственный.
Кстати, для сравнения, первая такая система, Airnav Radarbox, расчитанная на обычных пользователей, появилась в 2007 году, и стоила около 900$, еще около 250$ в год стоила подписка на сетевые сервисы.
Отзывы тех первых российских владельцев можно почитать на форуме . Сейчас, когда массово стали доступны RTL-SDR приемники, аналогичный девайс можно собрать за 30$, подробнее об этом было в . Мы же перейдем собственно, к протоколу — посмотрим как это работает.
Прием сигналов
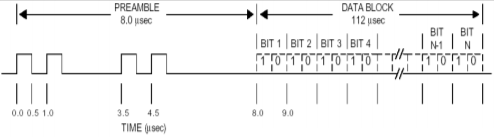
Для начала, сигнал нужно записать. Весь сигнал имеет длительность всего лишь 120 микросекунд, поэтому чтобы комфортно разобрать его компоненты, желателен SDR-приемник с частотой дискретизации не менее 5МГц.
После записи мы получаем WAV-файл с частотой дискретизации 5000000 семплов/сек, 30 секунд такой записи «весят» около 500Мб. Слушать её медиаплеером разумеется, бесполезно — файл содержит не звук, а непосредственно оцифрованный радиосигнал — именно так работает Software Defined Radio.
Открывать и обрабатывать файл мы будем с помощью Python. Желающие поэкспериментировать самостоятельно, могут скачать пример записи .
Загрузим файл, и посмотрим что внутри.
from scipy.io import wavfile
import matplotlib.pyplot as plt
import numpy as np
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
data = data.astype(float)
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
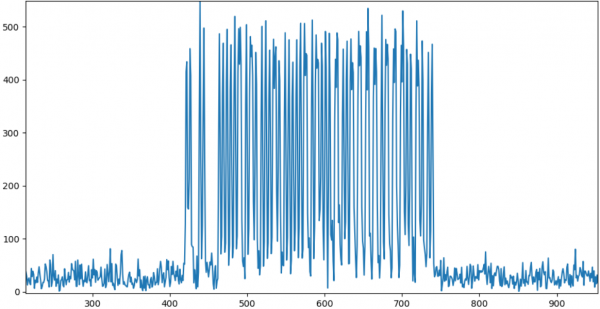
plt.plot(A)
plt.show()
Результат: мы видим явные «импульсы» на фоне шума.
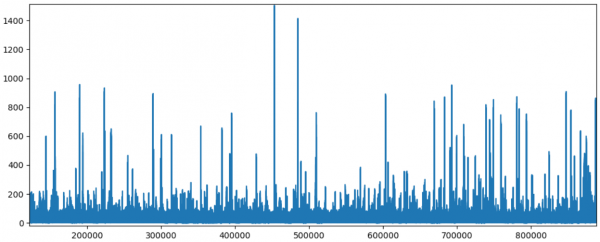
Каждый «импульс» — это и есть сигнал, структуру которого хорошо видно, если увеличить разрешение на графике.
Как можно видеть, картинка вполне соответствует тому, что приведено в описании выше. Можно приступать к обработке данных.
Декодирование
Для начала, нужно получить битовый поток. Сам сигнал закодирован с помощью manchester encoding:

Из разницы уровней в полубайтах легко получить реальные «0» и «1».
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
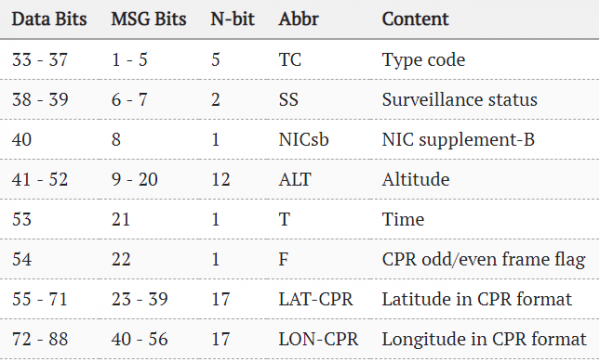
Структура самого сигнала имеет следующий вид:

Рассмотрим поля более подробно.
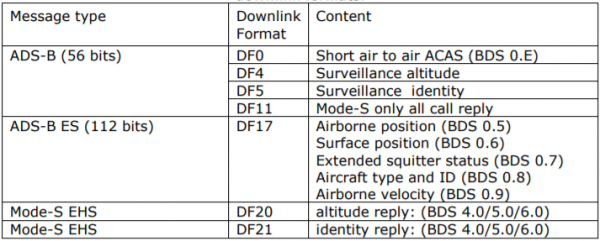
DF (Downlink Format, 5 бит) — определяет тип сообщения. Их несколько типов:
()
Нас интересует только тип DF17, т.к. именно он содержит координаты воздушного судна.
ICAO (24 бита) — международный уникальный код воздушного судна. Проверить самолет по его коду можно (к сожалению, автор перестал обновлять базу, но она еще актуальна). К примеру, для кода 3c5ee2 имеем следующую информацию:

Правка: в описание кода ICAO приведено более подробно, интересующимся рекомендую ознакомиться.
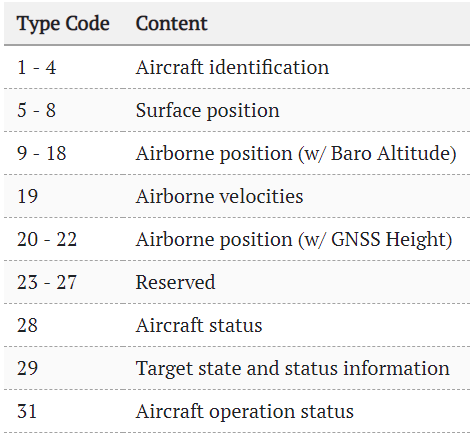
DATA (56 или 112 бит) — собственно данные, которые мы и будем декодировать. Первые 5 бит данных — поле Type Code, содержащее подтип хранящихся данных (не путать с DF). Таких типов довольно много:
()
Разберем несколько примеров пакетов.
Aircraft identification
Пример в бинарном виде:
00100 011 000101 010111 000111 110111 110001 111000
Поля данных:
+------+------+------+------+------+------+------+------+------+------+
| TC,5 | EC,3 | C1,6 | C2,6 | C3,6 | C4,6 | C5,6 | C6,6 | C7,6 | C8,6 |
+------+------+------+------+------+------+------+------+------+------+
TC = 00100b = 4, каждый символ C1-C8 содержит коды, соответствующие индексам в строке:
#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######
Раскодировав строку, несложно получить код самолета: EWG7184
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Aircraft Identification:", code_str.replace('#', ''))
Airborne position
Если с названием все просто, то с координатами посложнее. Они передаются в виде 2х, четных и нечетных фреймов. Код поля TC = 01011b = 11.
Пример четного и нечетного пакетов:
01011 000 000101110110 00 10111000111001000 10000110101111001
01011 000 000110010000 01 10010011110000110 10000011110001000
Само вычисление координат происходит по достаточно хитрой формуле:
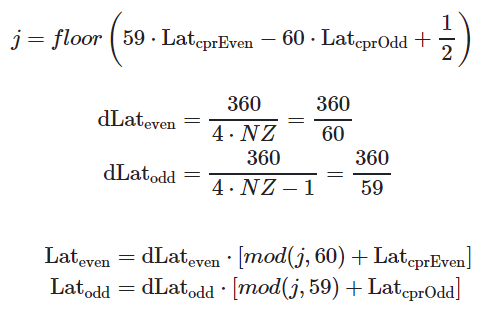
()
Я не специалист по ГИС, так что откуда оно выводится, не знаю. Кто в курсе, напишите в комментариях.
Высота считается проще — в зависимости от определенного бита, она может представляться либо кратной 25, либо 100 футам.
Airborne Velocity
Пакет с TC=19. Интересно тут то, что скорость может быть как точная, относительно земли (Ground Speed), так и воздушная, измеряемая датчиком самолета (Airspeed). Еще передается множество разных полей:
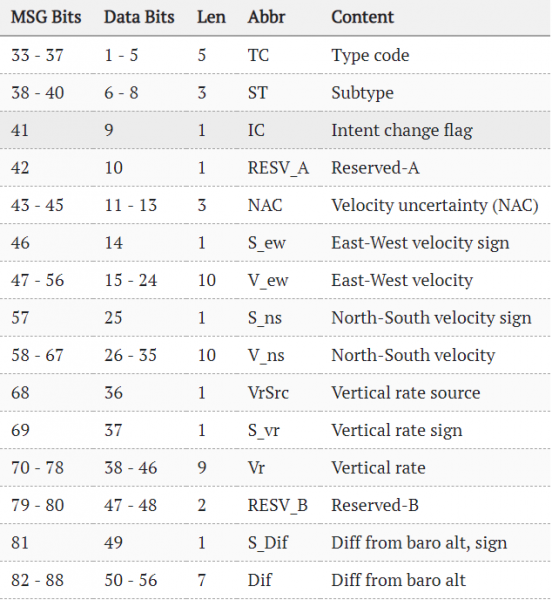
()
Заключение
Как можно видеть, технология ADS-B стала интересным симбиозом, когда какой-либо стандарт пригождается не только профессионалам, но и обычным пользователям. Но разумеется, ключевую роль в этом сыграло удешевление технологии цифровых SDR-приемников, позволяющим на девайсе буквально «за копейки» принимать сигналы с частотой выше гигагерца.
В самом стандарте разумеется, гораздо больше всего. Желающие могут посмотреть PDF на странице или посетить уже упомянутый выше .
Вряд ли многим пригодится все вышенаписанное, но по крайней мере общая идея того, как это работает, надеюсь, осталась.
Кстати, готовый декодер на Python уже существует, его можно изучить . А владельцы SDR-приемников могут собрать и запустить готовый ADS-B декодер , подробнее об этом рассказывалось в .
Исходный код парсера, описанный в статье, приведен под катом. Это тестовый пример, не претендующий на production, но кое-что в нем работает, и парсить записанный выше файл, им можно.
Исходный код (Python)
from __future__ import print_function
from scipy.io import wavfile
from scipy import signal
import matplotlib.pyplot as plt
import numpy as np
import math
import sys
def parse_message(data, start, bit_len):
max_len = bit_len*128
A = data[start:start + max_len]
A = signal.resample(A, 10*max_len)
bits = np.zeros(10*max_len)
bit_len *= 10
start_data = bit_len*8
# Parse first 8 bits
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
df = int(bits_str[0:5], 2)
# Aircraft address (db - https://junzis.com/adb/?q=3b1c5c )
bits_str = ""
for p in range(8, 32):
pos = start_data + bit_len * p
p1, p2 = A[pos: pos + bit_len / 2], A[pos + bit_len / 2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
# print "Aircraft address:", bits_str, hex(int(bits_str, 2))
address = hex(int(bits_str, 2))
# Filter specific aircraft (optional)
# if address != "0x3c5ee2":
# return
if df == 16 or df == 17 or df == 18 or df == 19 or df == 20 or df == 21:
# print "Pos:", start, "DF:", msg_type
# Data (56bit)
bits_str = ""
for p in range(32, 88):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
# bits[pos + bit_len / 2] = 50
elif avg1 > avg2:
bits_str += "1"
# http://www.lll.lu/~edward/edward/adsb/DecodingADSBposition.html
# print "Data:"
# print bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17]
# Type Code:
tc, ec = int(bits_str[:5], 2), int(bits_str[5:8], 2)
# print("DF:", df, "TC:", tc)
# 1 - 4 Aircraft identification
# 5 - 8 Surface position
# 9 - 18 Airborne position (w/ Baro Altitude)
# 19 Airborne velocities
if tc >= 1 and tc <= 4: # and (df == 17 or df == 18):
print("Aircraft address:", address)
print("Data:")
print(bits_str[:8], bits_str[8:14], bits_str[14:20], bits_str[20:26], bits_str[26:32], bits_str[32:38], bits_str[38:44])
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Aircraft Identification:", code_str.replace('#', ''))
print()
if tc == 11:
print("Aircraft address:", address)
print("Data: (11)")
print(bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17])
# Bit 22 contains the F flag which indicates which CPR format is used (odd or even)
# First frame has F flag = 0 so is even and the second frame has F flag = 1 so odd
# f = bits_str[21:22]
# print("F:", int(f, 2))
# Altitude
alt1b = bits_str[8:20]
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
# lat_dec = int(bits_str[22:22+17], 2)
# lon_dec = int(bits_str[39:39+17], 2)
# print("Lat/Lon:", lat_dec, lon_dec)
# http://airmetar.main.jp/radio/ADS-B%20Decoding%20Guide.pdf
print()
if tc == 19:
print("Aircraft address:", address)
print("Data:")
# print(bits_str)
print(bits_str[:5], bits_str[5:8], bits_str[8:10], bits_str[10:13], bits_str[13] ,bits_str[14:24], bits_str[24], bits_str[25:35], bits_str[35:36], bits_str[36:65])
subtype = int(bits_str[5:8], 2)
# https://mode-s.org/decode/adsb/airborne-velocity.html
spd, hdg, rocd = -1, -1, -1
if subtype == 1 or subtype == 2:
print("Velocity Subtype 1: Ground speed")
v_ew_sign = int(bits_str[13], 2)
v_ew = int(bits_str[14:24], 2) - 1 # east-west velocity
v_ns_sign = int(bits_str[24], 2)
v_ns = int(bits_str[25:35], 2) - 1 # north-south velocity
v_we = -1*v_ew if v_ew_sign else v_ew
v_sn = -1*v_ns if v_ns_sign else v_ns
spd = math.sqrt(v_sn*v_sn + v_we*v_we) # unit in kts
hdg = math.atan2(v_we, v_sn)
hdg = math.degrees(hdg) # convert to degrees
hdg = hdg if hdg >= 0 else hdg + 360 # no negative val
if subtype == 3:
print("Subtype Subtype 3: Airspeed")
hdg = int(bits_str[14:24], 2)/1024.0*360.0
spd = int(bits_str[25:35], 2)
vr_sign = int(bits_str[36], 2)
vr = int(bits_str[36:45], 2)
rocd = -1*vr if vr_sign else vr # rate of climb/descend
print("Speed (kts):", spd, "Rate:", rocd, "Heading:", hdg)
print()
# print()
def calc_coordinates():
def _cprN(lat, is_odd):
nl = _cprNL(lat) - is_odd
return nl if nl > 1 else 1
def _cprNL(lat):
try:
nz = 15
a = 1 - math.cos(math.pi / (2 * nz))
b = math.cos(math.pi / 180.0 * abs(lat)) ** 2
nl = 2 * math.pi / (math.acos(1 - a/b))
return int(math.floor(nl))
except:
# happens when latitude is +/-90 degree
return 1
def floor_(x):
return int(math.floor(x))
lat1b, lon1b, alt1b = "10111000111010011", "10000110111111000", "000101111001"
lat2b, lon2b, alt2b = "10010011101011100", "10000011000011011", "000101110111"
lat1, lon1, alt1 = int(lat1b, 2), int(lon1b, 2), int(alt1b, 2)
lat2, lon2, alt2 = int(lat2b, 2), int(lon2b, 2), int(alt2b, 2)
# 131072 is 2^17, since CPR lat and lon are 17 bits each
cprlat_even, cprlon_even = lat1/131072.0, lon1/131072.0
cprlat_odd, cprlon_odd = lat2/131072.0, lon2/131072.0
print(cprlat_even, cprlon_even)
j = floor_(59*cprlat_even - 60*cprlat_odd)
print(j)
air_d_lat_even = 360.0 / 60
air_d_lat_odd = 360.0 / 59
# Lat
lat_even = float(air_d_lat_even * (j % 60 + cprlat_even))
lat_odd = float(air_d_lat_odd * (j % 59 + cprlat_odd))
if lat_even >= 270:
lat_even = lat_even - 360
if lat_odd >= 270:
lat_odd = lat_odd - 360
# Lon
ni = _cprN(lat_even, 0)
m = floor_(cprlon_even * (_cprNL(lat_even)-1) - cprlon_odd * _cprNL(lat_even) + 0.5)
lon = (360.0 / ni) * (m % ni + cprlon_even)
print("Lat", lat_even, "Lon", lon)
# Altitude
# Q-bit (bit 48) indicates whether the altitude is encoded in multiples of 25 or 100 ft (0: 100 ft, 1: 25 ft)
# The value can represent altitudes from -1000 to +50175 ft.
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
T = 1/fs
print("Sample rate %f MS/s" % (fs / 1e6))
print("Cnt samples %d" % len(data))
print("Duration: %f s" % (T * len(data)))
data = data.astype(float)
cnt = data.shape[0]
# Processing only part on file (faster):
# cnt = 10000000
# data = data[:cnt]
print("Processing I/Q...")
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
bits = np.zeros(cnt)
# To see scope without any processing, uncomment
# plt.plot(A)
# plt.show()
# sys.exit(0)
print("Extracting signals...")
pos = 0
avg = 200
msg_start = 0
# Find beginning of each signal
while pos < cnt - 16*1024:
# P1 - message start
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg and pos - msg_start > 1000:
msg_start = pos
bits[pos] = 100
pos += 4
break
pos += 1
start1, start2, start3, start4 = msg_start, 0, 0, 0
# P2
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start2 = pos
bits[pos] = 90
pos += 1
break
pos += 1
# P3
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start3 = pos
bits[pos] = 80
pos += 1
break
pos += 1
# P4
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start4 = pos
bits[pos] = 70
pos += 1
break
pos += 1
sig_diff = start4 - start1
if 20 < sig_diff < 25:
bits[msg_start] = 500
bit_len = int((start4 - start1) / 4.5)
# print(pos, start1, start4, ' - ', bit_len)
# start = start1 + 8*bit_len
parse_message(A, msg_start, bit_len)
pos += 450
# For debugging: check signal start
# plt.plot(A)
# plt.plot(bits)
# plt.show()
Надеюсь, кому-то было интересно, спасибо за внимание.
Источник: habr.com
