

Objavljujem prvo poglavlje predavanja o teoriji automatskog upravljanja, nakon čega vam život više neće biti isti.
Predavanja iz predmeta „Upravljanje tehničkim sistemima“ drži Oleg Stepanovič Kozlov na Katedri za „Nuklearne reaktore i elektrane“ Fakulteta „Energetsko-mašinsko inženjerstvo“ MSTU. N.E. Bauman. Na čemu sam mu veoma zahvalan.
Ova predavanja su tek u pripremi za objavljivanje u obliku knjige, a pošto ima TAU specijalista, studenata i onih koji su jednostavno zainteresovani za predmet, svaka kritika je dobrodošla.

1. Osnovni koncepti teorije upravljanja tehničkim sistemima
1.1. Ciljevi, principi upravljanja, vrste sistema upravljanja, osnovne definicije, primjeri
Razvoj i unapređenje industrijske proizvodnje (energetika, transport, mašinstvo, svemirska tehnologija itd.) zahteva kontinuirano povećanje produktivnosti mašina i jedinica, poboljšanje kvaliteta proizvoda, smanjenje troškova i, posebno u nuklearnoj energiji, naglo povećanje sigurnost (nuklearna, radijacijska i dr.) .d.) rad nuklearnih elektrana i nuklearnih instalacija.
Realizacija postavljenih ciljeva je nemoguća bez uvođenja savremenih sistema upravljanja, uključujući automatizovane (uz učešće čoveka operatera) i automatske (bez učešća čoveka operatera) sisteme upravljanja (CS).
Definicija: Menadžment je organizacija određenog tehnološkog procesa koji osigurava postizanje postavljenog cilja.
Teorija upravljanja je grana moderne nauke i tehnologije. Zasniva se (zasnovana) kako na fundamentalnim (opštenaučnim) disciplinama (na primjer, matematika, fizika, hemija, itd.) tako i na primijenjenim disciplinama (elektronika, mikroprocesorska tehnologija, programiranje itd.).
Svaki kontrolni proces (automatski) sastoji se od sljedećih glavnih faza (elemenata):
- dobijanje informacija o kontrolnom zadatku;
- dobijanje informacija o rezultatu upravljanja;
- analiza primljenih informacija;
- implementacija odluke (uticaj na objekt kontrole).
Za implementaciju procesa upravljanja, sistem upravljanja (CS) mora imati:
- izvori informacija o zadatku upravljanja;
- izvori informacija o rezultatima kontrole (razni senzori, mjerni uređaji, detektori, itd.);
- uređaji za analizu primljenih informacija i razvoj rješenja;
- aktuatori koji djeluju na Upravljački objekt, koji sadrži: regulator, motore, pojačalo-konvertorske uređaje, itd.
Definicija: Ako upravljački sistem (CS) sadrži sve gore navedene dijelove, tada je zatvoren.
Definicija: Upravljanje tehničkim objektom korištenjem informacija o rezultatima kontrole naziva se princip povratne sprege.
Šematski se takav sistem upravljanja može predstaviti kao:
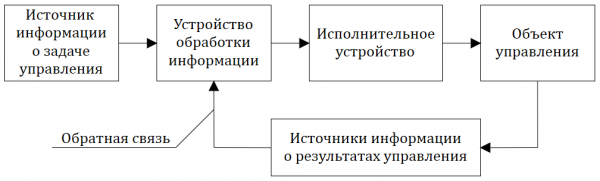
Rice. 1.1.1 — Struktura kontrolnog sistema (MS)
Ako upravljački sistem (CS) ima blok dijagram, čiji oblik odgovara sl. 1.1.1, i funkcioniše (radi) bez učešća čoveka (operatora), onda se zove automatski kontrolni sistem (ACS).
Ako kontrolni sistem radi uz učešće osobe (operatera), onda se zove automatizovani sistem upravljanja.
Ako Kontrola daje zadati zakon promjene objekta u vremenu, bez obzira na rezultate upravljanja, tada se takva kontrola izvodi u otvorenoj petlji, a sama kontrola se naziva programski kontrolisan.
Sistemi otvorene petlje uključuju industrijske mašine (transportne linije, rotacione linije, itd.), računarske mašine za numeričko upravljanje (CNC): videti primer na Sl. 1.1.2.
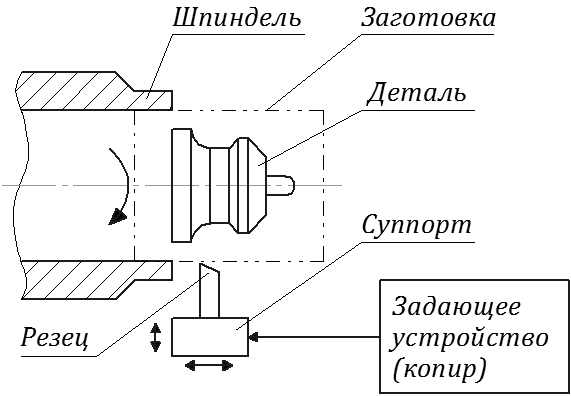
Sl.1.1.2 - Primjer programske kontrole
Glavni uređaj može biti, na primjer, “kopirni uređaj”.
Budući da u ovom primjeru nema senzora (mjera) koji nadgledaju dio koji se proizvodi, ako je npr. rezač pogrešno instaliran ili pokvaren, tada se postavljeni cilj (proizvodnja dijela) ne može postići (ostvariti). Obično je u sistemima ovog tipa potrebna kontrola izlaza, koja će samo zabilježiti odstupanje dimenzija i oblika dijela od željenog.
Automatski upravljački sistemi su podijeljeni u 3 tipa:
- sistemi automatskog upravljanja (ACS);
- sistemi automatskog upravljanja (ACS);
- sistemi za praćenje (SS).
SAR i SS su podskupovi samohodnih topova ==>  .
.
Definicija: Sistem automatskog upravljanja koji osigurava postojanost bilo koje fizičke veličine (grupe veličina) u kontrolnom objektu naziva se automatski upravljački sistem (ACS).
Automatski upravljački sistemi (ACS) su najčešći tip automatskih upravljačkih sistema.
Prvi automatski regulator na svijetu (18. vijek) je Watt regulator. Ovu šemu (vidi sliku 1.1.3) implementirao je Watt u Engleskoj kako bi održao konstantnu brzinu rotacije kotača parne mašine i, shodno tome, održao konstantnu brzinu rotacije (kretanja) remenice prijenosa (remena). ).
U ovoj šemi osetljivi elementi (mjerni senzori) su "tezine" (sfere). „Težine“ (sfere) takođe „teraju“ klackalicu, a zatim i ventil da se pomera. Stoga se ovaj sistem može klasifikovati kao sistem direktnog upravljanja, a regulator kao regulator direktnog dejstva, budući da istovremeno obavlja funkcije i "mjera" i "regulatora".
U regulatorima direktnog djelovanja dodatni izvor nije potrebna energija za pomicanje regulatora.
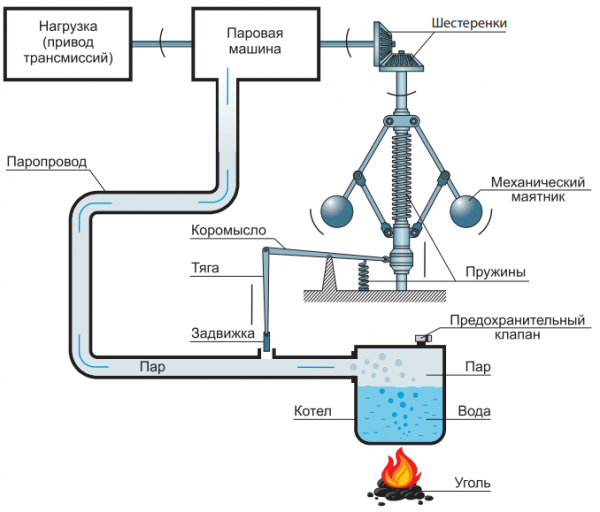
Rice. 1.1.3 — Kolo automatskog regulatora vati
Sistemi indirektnog upravljanja zahtijevaju prisustvo (prisustvo) pojačala (na primjer, snage), dodatnog aktuatora koji sadrži, na primjer, električni motor, servomotor, hidraulički pogon itd.
Primjer automatskog upravljačkog sistema (automatskog upravljačkog sistema), u punom smislu ove definicije, je upravljački sistem koji osigurava lansiranje rakete u orbitu, pri čemu kontrolirana varijabla može biti npr. ugao između rakete osa i normala na Zemlju ==> vidi sl. 1.1.4.a i sl. 1.1.4.b
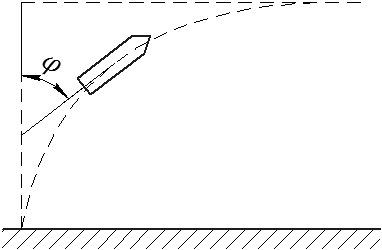
Rice. 1.1.4(a)
Rice. 1.1.4 (b)
1.2. Struktura upravljačkih sistema: jednostavni i višedimenzionalni sistemi
U teoriji upravljanja tehničkim sistemima, svaki sistem se obično dijeli na skup veza povezanih u mrežne strukture. U najjednostavnijem slučaju, sistem sadrži jednu vezu čiji se ulaz snabdijeva ulaznom akcijom (input), a odgovor sistema (output) se dobija na ulazu.
U teoriji upravljanja tehničkim sistemima koriste se 2 glavna načina predstavljanja veza upravljačkih sistema:
— u varijablama „ulaz-izlaz“;
— u varijablama stanja (za više detalja, pogledajte odeljke 6...7).
Reprezentacija u ulazno-izlaznim varijablama se obično koristi za opisivanje relativno jednostavnih sistema koji imaju jedan “ulaz” (jedna kontrolna radnja) i jedan “izlaz” (jedna kontrolirana varijabla, vidi sliku 1.2.1).
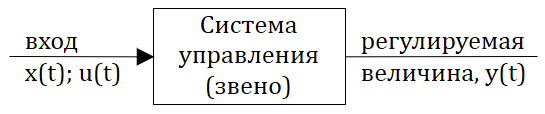
Rice. 1.2.1 – Šematski prikaz jednostavnog upravljačkog sistema
Obično se ovaj opis koristi za tehnički jednostavne sisteme automatskog upravljanja (automatski kontrolni sistemi).
Nedavno je predstavljanje u varijablama stanja postalo široko rasprostranjeno, posebno za tehnički složene sisteme, uključujući višedimenzionalne automatske upravljačke sisteme. Na sl. 1.2.2 prikazuje šematski prikaz višedimenzionalnog sistema automatskog upravljanja, gdje u1(t)…um(t) — kontrolne radnje (kontrolni vektor), y1(t)…yp(t) — podesivi parametri ACS-a (izlazni vektor).
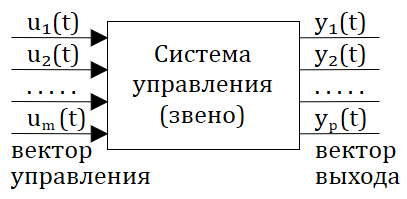
Rice. 1.2.2 — Šematski prikaz višedimenzionalnog upravljačkog sistema
Razmotrimo detaljnije strukturu ACS-a, predstavljenu u varijablama "ulaz-izlaz" i koja ima jedan ulaz (ulaz ili master ili kontrolno djelovanje) i jedan izlaz (izlazno djelovanje ili kontrolirana (ili podesiva) varijabla).
Pretpostavimo da se blok dijagram takvog ACS-a sastoji od određenog broja elemenata (linkova). Grupiranjem veza prema funkcionalnom principu (šta veze rade), strukturni dijagram ACS-a može se svesti na sljedeći tipičan oblik:
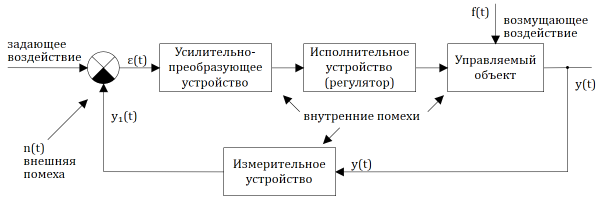
Rice. 1.2.3 — Blok dijagram sistema automatskog upravljanja
Simbol ε(t) ili promenljiva ε(t) označava neusklađenost (grešku) na izlazu uređaja za upoređivanje, koji može „raditi“ u načinu kako jednostavnih uporednih aritmetičkih operacija (najčešće oduzimanje, rjeđe sabiranje) tako i složenijih uporednih operacija (procedura).
Pošto y1(t) = y(t)*k1gde k1 je dobitak, onda ==>
ε(t) = x(t) - y1(t) = x(t) - k1*y(t)
Zadatak kontrolnog sistema je (ako je stabilan) da "radi" na otklanjanju neusklađenosti (greške) ε(t), tj. ==> ε(t) → 0.
Treba napomenuti da na sistem upravljanja utiču i spoljašnji uticaji (kontrolisanje, ometanje, smetnje) i unutrašnje smetnje. Interferencija se od uticaja razlikuje po stohastičnosti (slučajnosti) svog postojanja, dok je uticaj skoro uvek deterministički.
Za označavanje kontrole (akcije podešavanja) koristićemo bilo koji x (t), ili u (t).
1.3. Osnovni zakoni kontrole
Ako se vratimo na posljednju sliku (blok dijagram ACS-a na slici 1.2.3), onda je potrebno „dešifrirati“ ulogu koju ima pojačalo-konvertirajući uređaj (koje funkcije obavlja).
Ako uređaj za pojačavanje i pretvaranje (ACD) samo pojačava (ili prigušuje) signal neusklađenosti ε(t), naime:  gde
gde  – koeficijent proporcionalnosti (u konkretnom slučaju
– koeficijent proporcionalnosti (u konkretnom slučaju  = Const), onda se takav način upravljanja zatvorenog sistema automatskog upravljanja naziva modom proporcionalna kontrola (P-kontrola).
= Const), onda se takav način upravljanja zatvorenog sistema automatskog upravljanja naziva modom proporcionalna kontrola (P-kontrola).
Ako upravljačka jedinica generiše izlazni signal ε1(t), proporcionalan grešci ε(t) i integralu ε(t), tj.  , tada se poziva ovaj način upravljanja proporcionalno integrativna (PI kontrola). ==>
, tada se poziva ovaj način upravljanja proporcionalno integrativna (PI kontrola). ==>  gde b – koeficijent proporcionalnosti (u konkretnom slučaju b = Konst).
gde b – koeficijent proporcionalnosti (u konkretnom slučaju b = Konst).
Tipično, PI kontrola se koristi za poboljšanje tačnosti kontrole (regulacije).
Ako upravljačka jedinica generiše izlazni signal ε1(t), proporcionalan grešci ε(t) i njenom derivatu, tada se ovaj način rada naziva proporcionalno diferencirajući (PD kontrola): ==> 
Tipično, upotreba PD kontrole povećava performanse ACS-a
Ako upravljačka jedinica generiše izlazni signal ε1(t), proporcionalan grešci ε(t), njenom izvodu i integralu greške ==>  , tada se poziva ovaj način rada, zatim se poziva ovaj način upravljanja proporcionalno-integralno-diferencirajući način upravljanja (PID kontrola).
, tada se poziva ovaj način rada, zatim se poziva ovaj način upravljanja proporcionalno-integralno-diferencirajući način upravljanja (PID kontrola).
PID kontrola vam često omogućava da pružite "dobru" tačnost kontrole uz "dobru" brzinu
1.4. Klasifikacija sistema automatskog upravljanja
1.4.1. Klasifikacija prema vrsti matematičkog opisa
Na osnovu vrste matematičkog opisa (jednačine dinamike i statike), sistemi automatskog upravljanja (ACS) se dele na linearno и nelinearni sistema (samohodne topove ili SAR).
Svaka “podklasa” (linearna i nelinearna) je podijeljena na više “podklasa”. Na primjer, linearni samohodni topovi (SAP) imaju razlike u vrsti matematičkog opisa.
Budući da će se u ovom semestru razmatrati dinamička svojstva samo linearnih automatskih upravljačkih (regulacionih) sistema, u nastavku dajemo klasifikaciju prema vrsti matematičkog opisa za linearne automatske upravljačke sisteme (ACS):
1) Linearni automatski upravljački sistemi opisani u ulazno-izlaznim varijablama običnim diferencijalnim jednačinama (ODE) sa trajno koeficijenti:


gdje x (t) – ulazni uticaj; y (t) – utjecaj na izlaz (podesiva vrijednost).
Ako koristimo operatorski („kompaktni“) oblik za pisanje linearnog ODE-a, tada se jednačina (1.4.1) može predstaviti u sljedećem obliku:

gdje, p = d/dt — operator diferencijacije; L(p), N(p) su odgovarajući linearni diferencijalni operatori, koji su jednaki:


2) Linearni sistemi automatskog upravljanja opisani linearnim običnim diferencijalnim jednačinama (ODE) sa varijable (vremenski) koeficijenti:


U opštem slučaju, takvi sistemi se mogu klasifikovati kao nelinearni sistemi automatskog upravljanja (NSA).
3) Linearni automatski upravljački sistemi opisani linearnim razlikama:


gdje f(…) – linearna funkcija argumenata; k = 1, 2, 3… - cijeli brojevi; Δt – interval kvantizacije (interval uzorkovanja).
Jednačina (1.4.4) se može predstaviti u "kompaktnoj" notaciji:

Tipično, ovaj opis linearnih automatskih upravljačkih sistema (ACS) se koristi u digitalnim sistemima upravljanja (pomoću računara).
4) Linearni automatski kontrolni sistemi sa kašnjenjem:

gdje L(p), N(p) — linearni diferencijalni operatori; τ — vrijeme kašnjenja ili konstanta kašnjenja.
Ako operateri L(p) и N(p) degenerisan (L(p) = 1; N(p) = 1), tada jednačina (1.4.6) odgovara matematičkom opisu dinamike idealne veze kašnjenja:

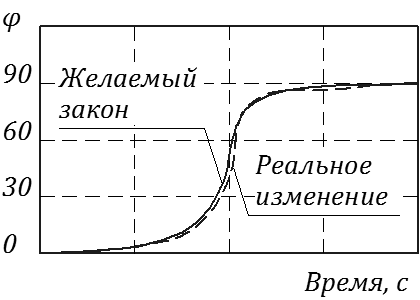
a grafička ilustracija njegovih svojstava prikazana je na Sl. 1.4.1
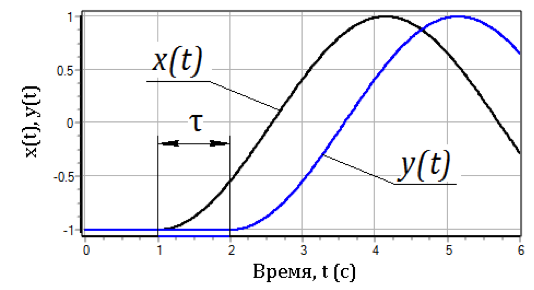
Rice. 1.4.1 — Grafikoni ulaza i izlaza idealne veze za kašnjenje
5) Linearni sistemi automatskog upravljanja opisani linearnim diferencijalnim jednačinama u parcijalni derivati. Takvi samohodni topovi se često nazivaju distribuirano kontrolni sistemi. ==> "apstraktni" primjer takvog opisa:

Sistem jednačina (1.4.7) opisuje dinamiku linearno raspoređenog sistema automatskog upravljanja, tj. kontrolisana veličina ne zavisi samo od vremena, već i od jedne prostorne koordinate.
Ako je sistem upravljanja “prostorni” objekat, onda ==>

gdje  ovisi o vremenskim i prostornim koordinatama određenim radijus vektorom
ovisi o vremenskim i prostornim koordinatama određenim radijus vektorom 
6) Opisani samohodni topovi sistemi ODE, ili sistemi diferencijalnih jednadžbi, ili sistemi parcijalnih diferencijalnih jednadžbi ==> i tako dalje...
Slična klasifikacija se može predložiti za nelinearne automatske upravljačke sisteme (SAP)…
Za linearne sisteme ispunjeni su sljedeći zahtjevi:
- linearnost statičkih karakteristika ACS-a;
- linearnost jednačine dinamike, tj. varijable su uključene u jednačinu dinamike samo u linearnoj kombinaciji.
Statička karakteristika je ovisnost izlaza o veličini ulaznog utjecaja u stacionarnom stanju (kada su svi prijelazni procesi izumrli).
Za sisteme opisane linearnim običnim diferencijalnim jednadžbama sa konstantnim koeficijentima, statička karakteristika se dobija iz dinamičke jednadžbe (1.4.1) postavljanjem svih nestacionarnih članova na nulu ==>

Na slici 1.4.2 prikazani su primjeri linearnih i nelinearnih statičkih karakteristika sistema automatskog upravljanja (regulacije).
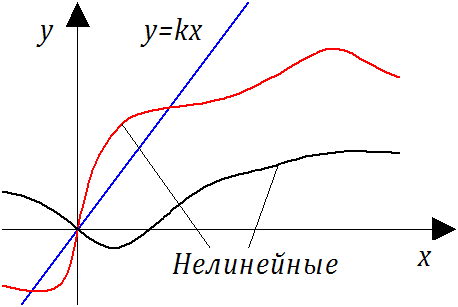
Rice. 1.4.2 - Primjeri statičkih linearnih i nelinearnih karakteristika
Nelinearnost termina koji sadrže vremenske derivate u dinamičkim jednačinama može nastati kada se koriste nelinearne matematičke operacije (*, /,  ,
,  , sin, ln, itd.). Na primjer, s obzirom na jednadžbu dinamike nekog "apstraktnog" samohodnog topa
, sin, ln, itd.). Na primjer, s obzirom na jednadžbu dinamike nekog "apstraktnog" samohodnog topa

Imajte na umu da u ovoj jednačini, sa linearnom statičkom karakteristikom  drugi i treći član (dinamički članovi) na lijevoj strani jednačine su nelinearni, stoga je ACS opisan sličnom jednačinom nelinearni in dinamičan plan.
drugi i treći član (dinamički članovi) na lijevoj strani jednačine su nelinearni, stoga je ACS opisan sličnom jednačinom nelinearni in dinamičan plan.
1.4.2. Klasifikacija prema prirodi emitovanih signala
Na osnovu prirode emitovanih signala, sistemi automatske kontrole (ili regulacije) se dele na:
- kontinuirani sistemi (kontinuirani sistemi);
- relejni sistemi (relejni sistemi);
- sistemi diskretnog djelovanja (impulsni i digitalni).
Sistem kontinuirano radnja se zove takav ACS, u čijoj vezi kontinuirano promjena ulaznog signala tokom vremena odgovara kontinuiranom promjena izlaznog signala, dok zakon promjene izlaznog signala može biti proizvoljan. Da bi samohodni top bio kontinuiran, potrebno je da sve statičke karakteristike veze su bile kontinuirane.
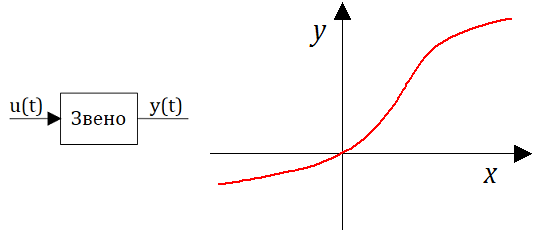
Rice. 1.4.3 - Primjer kontinuiranog sistema
Sistem relej radnja se naziva automatskim upravljačkim sistemom u kojem barem u jednoj vezi, uz kontinuiranu promjenu ulazne vrijednosti, izlazna vrijednost u pojedinim trenucima kontrolnog procesa mijenja “skok” u zavisnosti od vrijednosti ulaznog signala. Statička karakteristika takve veze ima tačke prekida ili fraktura sa rupturom.
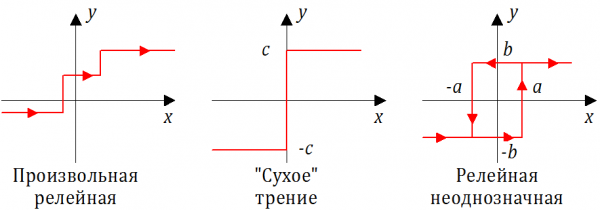
Rice. 1.4.4 - Primjeri statičkih karakteristika releja
Sistem diskretno akcija je sistem u kojem barem u jednoj karici, uz kontinuiranu promjenu ulazne veličine, izlazna veličina ima vrsta individualnih impulsa, koji se pojavljuje nakon određenog vremenskog perioda.
Veza koja konvertuje kontinuirani signal u diskretni signal naziva se pulsna veza. Sličan tip odašiljanih signala javlja se u sistemu automatskog upravljanja sa računarom ili kontrolerom.
Najčešće implementirane metode (algoritmi) za pretvaranje kontinuiranog ulaznog signala u impulsni izlazni signal su:
- pulsna amplitudna modulacija (PAM);
- Modulacija širine impulsa (PWM).
Na sl. Slika 1.4.5 predstavlja grafičku ilustraciju algoritma pulsne amplitudne modulacije (PAM). Na vrhu sl. prikazana je vremenska zavisnost x (t) - signal na ulazu u impulsnu sekciju. Izlazni signal pulsnog bloka (link) y (t) – niz pravougaonih impulsa koji se pojavljuju sa stalni period kvantizacije Δt (vidi donji dio slike). Trajanje impulsa je isto i jednako Δ. Amplituda impulsa na izlazu bloka je proporcionalna odgovarajućoj vrijednosti kontinuiranog signala x(t) na ulazu ovog bloka.
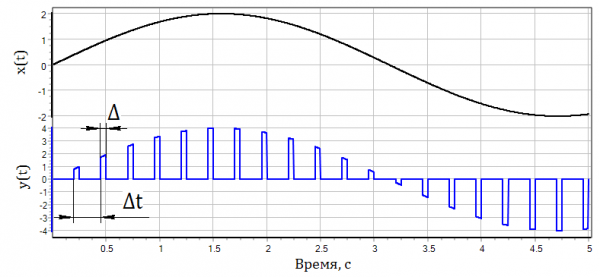
Rice. 1.4.5 — Implementacija modulacije impulsne amplitude
Ova metoda pulsne modulacije bila je vrlo česta u elektronskoj mjernoj opremi sistema upravljanja i zaštite (CPS) nuklearnih elektrana (NE) 70-ih...80-ih godina prošlog vijeka.
Na sl. Slika 1.4.6 prikazuje grafičku ilustraciju algoritma modulacije širine impulsa (PWM). Na vrhu sl. 1.14 prikazuje vremensku zavisnost x (t) – signal na ulazu u impulsnu vezu. Izlazni signal pulsnog bloka (link) y (t) – niz pravokutnih impulsa koji se pojavljuju sa konstantnim periodom kvantizacije Δt (vidi dno slike 1.14). Amplituda svih impulsa je ista. Trajanje pulsa Δt na izlazu bloka je proporcionalna odgovarajućoj vrijednosti kontinuiranog signala x (t) na ulazu impulsnog bloka.
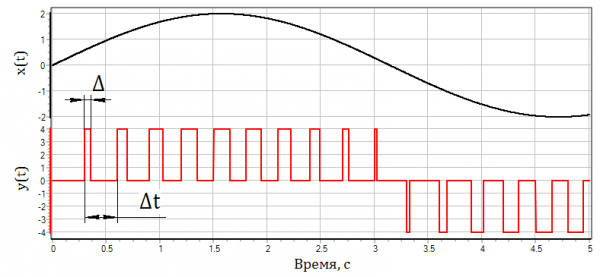
Rice. 1.4.6 — Implementacija modulacije širine impulsa
Ova metoda pulsne modulacije trenutno je najzastupljenija u elektronskoj mjernoj opremi sistema upravljanja i zaštite (CPS) nuklearnih elektrana (NE) i ACS drugih tehničkih sistema.
Zaključujući ovaj pododjeljak, treba napomenuti da ako su karakteristične vremenske konstante u drugim karikama samohodnih topova (SAP) znatno više Δt (po redovima veličine), zatim pulsni sistem može se smatrati kontinuiranim automatskim kontrolnim sistemom (kada se koristi i AIM i PWM).
1.4.3. Klasifikacija po prirodi kontrole
Na osnovu prirode upravljačkih procesa, automatski upravljački sistemi se dijele na sljedeće tipove:
- deterministički sistemi automatskog upravljanja, u kojima se ulazni signal može nedvosmisleno povezati sa izlaznim signalom (i obrnuto);
- stohastički ACS (statistički, probabilistički), u kojem ACS "reaguje" na dati ulazni signal nasumično (stohastički) izlazni signal.
Izlazni stohastički signal karakterizira:
- zakon distribucije;
- matematičko očekivanje (prosječna vrijednost);
- disperzija (standardna devijacija).
Stohastička priroda kontrolnog procesa se obično posmatra u u suštini nelinearni ACS kako sa stanovišta statičkih karakteristika, tako i sa stanovišta (čak iu većoj meri) nelinearnosti dinamičkih članova u jednačinama dinamike.
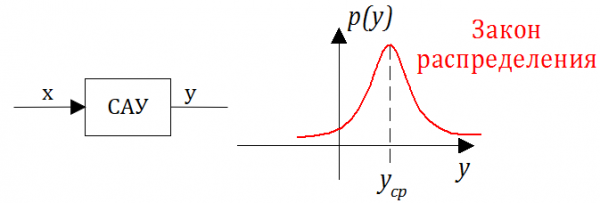
Rice. 1.4.7 — Distribucija izlazne vrijednosti stohastičkog sistema automatskog upravljanja
Pored navedenih glavnih tipova klasifikacije sistema upravljanja, postoje i druge klasifikacije. Na primjer, klasifikacija se može izvršiti prema metodi upravljanja i zasnivati se na interakciji sa vanjskim okruženjem i sposobnosti prilagođavanja ACS-a promjenama parametara okoline. Sistemi su podijeljeni u dvije velike klase:
1) Obični (nesamopodešavajući) sistemi upravljanja bez adaptacije; Ovi sistemi spadaju u kategoriju jednostavnih koji ne mijenjaju svoju strukturu tokom procesa upravljanja. Oni su najrazvijeniji i najšire korišteni. Obični sistemi upravljanja podijeljeni su u tri podklase: otvoreni, zatvoreni i kombinovani upravljački sistemi.
2) Samopodešavajući (adaptivni) sistemi upravljanja. U ovim sistemima, kada se menjaju spoljašnji uslovi ili karakteristike kontrolisanog objekta, dolazi do automatske (ne unapred određene) promene parametara kontrolnog uređaja usled promene koeficijenata sistema upravljanja, strukture sistema upravljanja, pa čak i uvođenja novih elemenata. .
Drugi primjer klasifikacije: prema hijerarhijskoj osnovi (jednostepeni, dvostepeni, višestepeni).
Samo registrovani korisnici mogu učestvovati u anketi. molim.
Nastaviti sa objavljivanjem predavanja o UTS-u?
-
88,7%Da118
-
7,5%No10
-
3,8%Ne znam 5
Glasalo je 133 korisnika. Uzdržano je bilo 10 korisnika.
izvor: www.habr.com
