


Mae'r erthygl hon yn dechrau cyfres o erthyglau wedi'u neilltuo i ddulliau awtomataidd ar gyfer tiwnio rheolwyr PID yn amgylchedd Simulink. Heddiw, byddwn yn darganfod sut i weithio gyda'r cais PID Tuner.
Cyflwyniad
Gellir ystyried y math mwyaf poblogaidd o reolwyr a ddefnyddir mewn diwydiant mewn systemau rheoli dolen gaeedig yn rheolwyr PID. Ac os yw peirianwyr yn cofio strwythur ac egwyddor gweithrediad y rheolydd o'u dyddiau myfyriwr, yna ei ffurfwedd, h.y. cyfrifo cyfernodau rheolydd yn dal yn broblem. Mae yna lawer iawn o lenyddiaeth, tramor (er enghraifft, [1, 2]) a domestig (er enghraifft, [3, 4]), lle mae addasiad rheoleiddwyr yn cael ei esbonio yn iaith eithaf cymhleth theori rheolaeth awtomatig.
Bydd y gyfres hon o erthyglau yn disgrifio ffyrdd awtomataidd o diwnio rheolwyr PID gan ddefnyddio offer Simulink megis:
- Tiwniwr PID
- Optimizer Ymateb
- Tiwniwr System Reoli,
- Tiwniwr PID Seiliedig ar Ymateb Amlder,
- Autotiwniwr PID Dolen Gaeedig.
Gwrthrych y system reoli fydd gyriant trydan yn seiliedig ar fodur DC wedi'i gyffroi gan magnetau parhaol, gan weithio gyda blwch gêr ar gyfer llwyth anadweithiol, gyda'r paramedrau canlynol:
- foltedd cyflenwad modur,
 ;
; - ymwrthedd gweithredol y weindio armature modur,
 ;
; - adweithedd anwythol y weindio armature modur,
 ;
; - cyfernod torque injan,
 ;
; - eiliad o syrthni'r rotor modur,
 .
.
Paramedrau llwyth a blwch gêr:
- eiliad o syrthni'r llwyth,
 ;
; - cymhareb gêr,
 .
.
Nid yw'r erthyglau yn ymarferol yn cynnwys fformiwlâu mathemategol, fodd bynnag, mae'n ddymunol bod gan y darllenydd wybodaeth sylfaenol yn y theori rheolaeth awtomatig, yn ogystal â phrofiad mewn modelu yn amgylchedd Simulink i ddeall y deunydd arfaethedig.
Model system
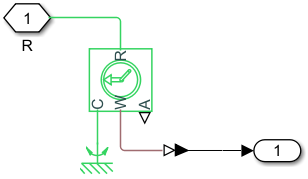
Gadewch i ni ystyried system reoli llinol ar gyfer cyflymder onglog gyriant trydan servo, y cyflwynir diagram bloc wedi'i symleiddio ohono isod.

Yn unol â'r strwythur a roddir, adeiladwyd model o system o'r fath yn amgylchedd Simulink.

Crëwyd modelau o'r gyriant trydan (Is-system actuator trydan) a llwyth anadweithiol (is-system llwyth) gan ddefnyddio blociau llyfrgell modelu ffisegol :
- model gyriant trydan,
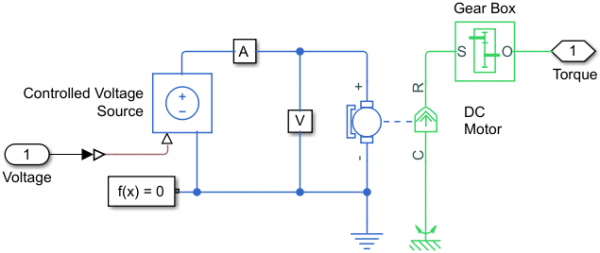
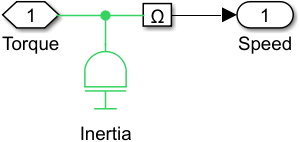
- model llwyth inertial.
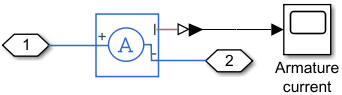
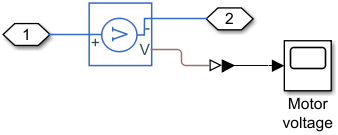
Mae modelau gyriant a llwyth trydan hefyd yn cynnwys is-systemau synhwyrydd o feintiau ffisegol amrywiol:
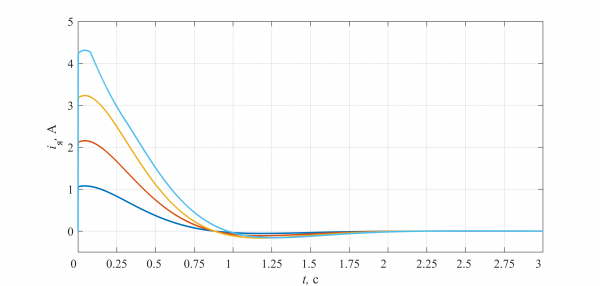
- cerrynt yn llifo wrth weindio armature y modur (is-system A),
- foltedd ar ei weindio (is-system V),
- cyflymder onglog y gwrthrych rheoli (is-system Ω).
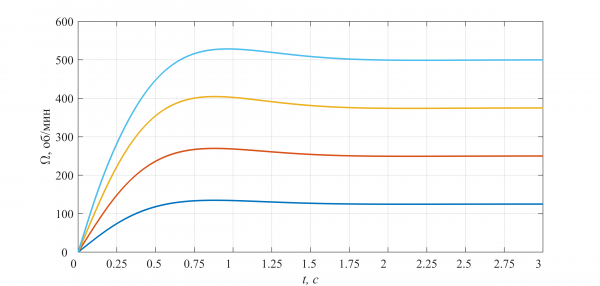
Cyn gosod paramedrau'r rheolydd PID, gadewch i ni redeg y model i'w gyfrifo, gan dderbyn swyddogaeth trosglwyddo'r rheolydd  . Mae'r canlyniadau efelychu ar gyfer signal mewnbwn o 150 rpm i'w gweld isod.
. Mae'r canlyniadau efelychu ar gyfer signal mewnbwn o 150 rpm i'w gweld isod.
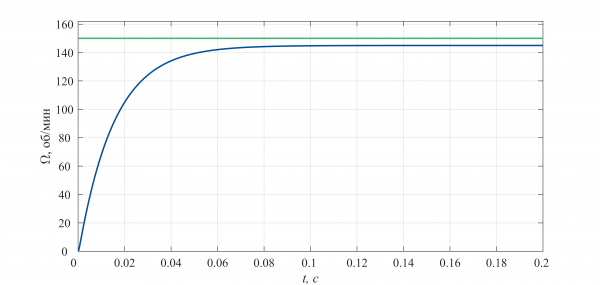
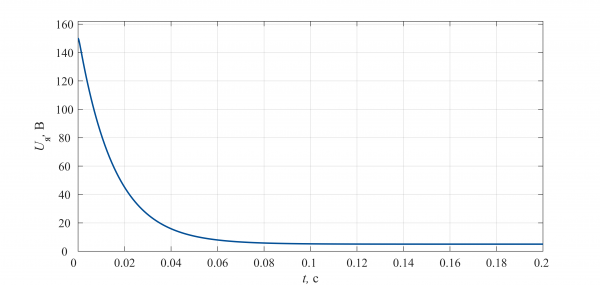
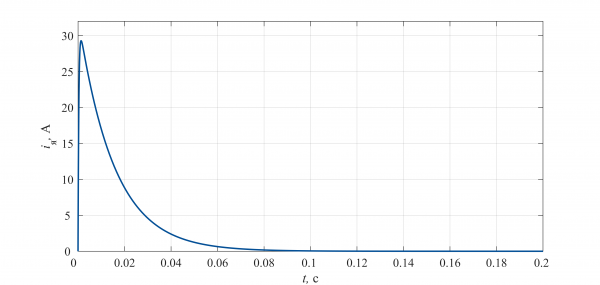
O’r dadansoddiad o’r graffiau uchod mae’n amlwg:
- Nid yw cyfesuryn allbwn y system reoli yn cyrraedd y gwerth penodedig, h.y. Mae gwall statig yn y system.
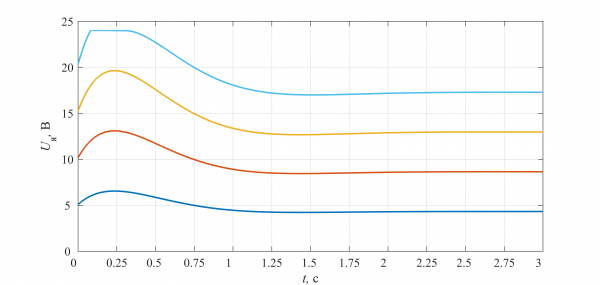
- Mae'r foltedd ar y dirwyniadau modur yn cyrraedd gwerth o 150 V ar ddechrau'r efelychiad, a fydd yn arwain at ei fethiant oherwydd cyflenwad foltedd sy'n fwy na'r un enwol (24 V) i'w weindiadau.
Gadewch i ymateb y system i ysgogiad sengl fodloni'r gofynion canlynol:
- gor-shoot (Gor-shoot) dim mwy na 10%,
- Amser codi yn llai na 0.8 s,
- Amser dros dro (Amser setlo) llai na 2 s.
Yn ogystal, rhaid i'r rheolydd gyfyngu ar y foltedd a gyflenwir i'r modur dirwyn i ben i werth y foltedd cyflenwad.
Gosod y rheolydd
Mae paramedrau'r rheolydd wedi'u ffurfweddu gan ddefnyddio'r offeryn , sydd ar gael yn uniongyrchol yn ffenestr paramedrau bloc y Rheolwr PID.
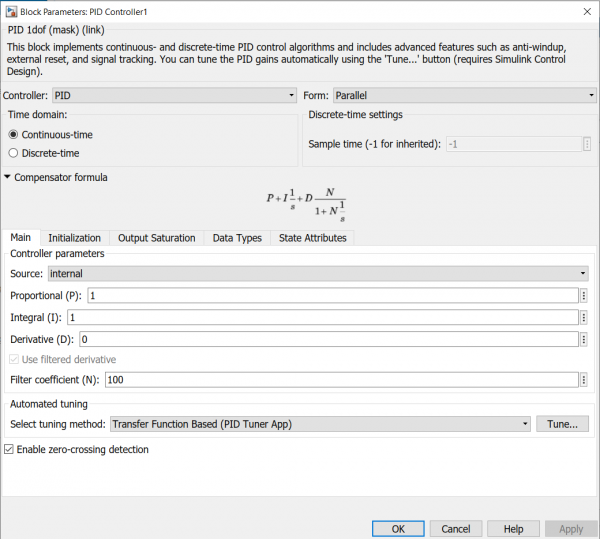
Mae'r cais yn cael ei lansio trwy wasgu botwm Tiwn…lleoli ar y panel Tiwnio awtomataidd. Mae'n werth nodi, cyn perfformio'r cam o osod paramedrau'r rheolydd, bod angen dewis ei fath (P, DP, PD, ac ati), yn ogystal â'i fath (analog neu arwahanol).
Gan mai un o'r gofynion yw cyfyngu ar ei gyfesuryn allbwn (foltedd ar y modur dirwyn i ben), dylid nodi'r ystod foltedd a ganiateir. Ar gyfer hyn:
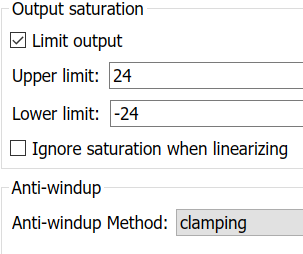
- Ewch i'r tab Dirlawnder allbwn.
- Cliciwch ar y botwm baner Cyfyngu ar allbwn, o ganlyniad mae'r meysydd ar gyfer gosod ffiniau uchaf (Terfyn Uchaf) ac isaf (Terfyn Is) yr ystod gwerth allbwn yn cael eu gweithredu.
- Gosodwch ffiniau'r amrediad.
Mae gweithrediad cywir yr uned reoleiddio fel rhan o'r system yn golygu defnyddio dulliau sydd wedi'u hanelu at frwydro yn erbyn dirlawnder annatod. Mae'r bloc yn gweithredu dau ddull: ôl-gyfrifo a chlampio. Ceir gwybodaeth fanwl am y dulliau hyn . Mae'r gwymplen dewis dull wedi'i lleoli ar y panel Gwrth-windup.
Yn yr achos hwn, byddwn yn ysgrifennu'r gwerthoedd 24 a -24 yn y meysydd Terfyn uchaf и Terfyn is yn unol â hynny, a hefyd yn defnyddio'r dull clampio i ddileu dirlawnder annatod.
Efallai y byddwch yn sylwi bod ymddangosiad y bloc rheoleiddiwr wedi newid: mae arwydd dirlawnder wedi ymddangos wrth ymyl porthladd allbwn y bloc.
Nesaf, derbyniwch bob newid trwy wasgu'r botwm Gwneud cais, dychwelyd i'r tab Prif a gwasgwch y botwm Tiwn…, a fydd yn agor ffenestr cais PIDTuner newydd.
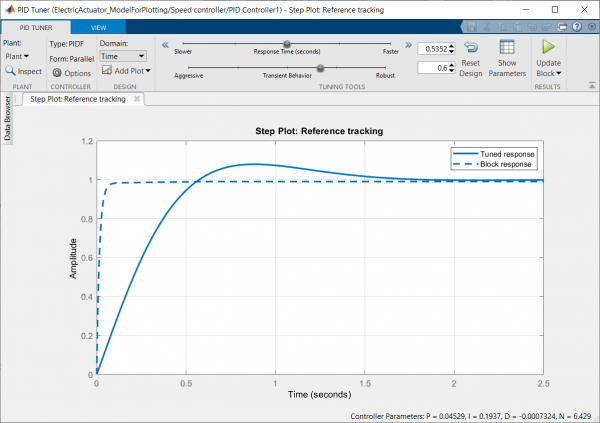
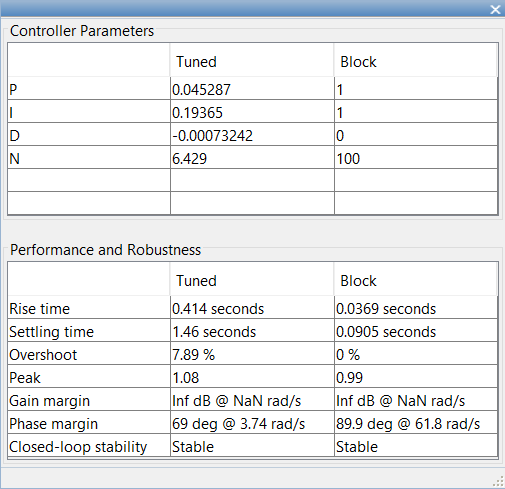
Yn ardal graffigol y ffenestr, mae dwy broses dros dro yn cael eu harddangos: gyda pharamedrau cyfredol y rheolydd, h.y. ar gyfer rheolydd heb ei ffurfweddu, ac ar gyfer gwerthoedd a ddewisir yn awtomatig. Gellir gweld gwerthoedd paramedr newydd trwy glicio ar y botwm Dangos Paramedraulleoli ar y bar offer. Pan fyddwch yn pwyso'r botwm, bydd dau dabl yn ymddangos: paramedrau dethol y rheolydd (Paramedrau Rheolydd) ac asesiadau o nodweddion y broses dros dro gyda'r paramedrau a ddewiswyd (Perfformiad a Chadernid).
Fel y gwelir o werthoedd yr ail dabl, mae'r cyfernodau rheolydd a gyfrifir yn awtomatig yn bodloni'r holl ofynion.
Cwblheir gosodiad y rheolydd trwy wasgu'r botwm gyda thriongl gwyrdd i'r dde o'r botwm Dangos Paramedrau, ac ar ôl hynny bydd y gwerthoedd paramedr newydd yn newid yn awtomatig yn y meysydd cyfatebol yn ffenestr gosodiadau paramedr bloc y Rheolwr PID.
Mae canlyniadau efelychu system gyda rheolydd tiwniedig ar gyfer sawl signal mewnbwn i'w gweld isod. Ar lefelau signal mewnbwn uchel (llinell las), bydd y system yn gweithredu yn y modd dirlawnder foltedd.
Sylwch fod yr offeryn Tiwniwr PID yn dewis cyfernodau'r rheolydd yn seiliedig ar fodel llinol, felly wrth symud i fodel aflinol, mae angen egluro ei baramedrau. Yn yr achos hwn, gallwch ddefnyddio'r cais .
Llenyddiaeth
- Llawlyfr Rheolau Tiwnio'r Rheolwr DP a PID. Aidan O'Dwyer
- Dylunio System Reoli PID a Thiwnio Awtomatig gan ddefnyddio MATLAB, Simulink. Wang L.
- Rheolaeth PID ar ffurf nad yw'n llym. Karpov V.E.
- rheolwyr PID. Materion gweithredu. Rhannau 1, 2. Denisenko V.
Ffynhonnell: hab.com
