


vi talte om, hvordan busser og protokoller fungerer i industriel automation. Denne gang vil vi fokusere på moderne arbejdsløsninger: vi vil se på, hvilke protokoller der bruges i systemer rundt om i verden. Lad os overveje teknologierne fra de tyske virksomheder Beckhoff og Siemens, det østrigske B&R, det amerikanske Rockwell Automation og det russiske Fastwel. Vi vil også studere universelle løsninger, der ikke er bundet til en bestemt producent, såsom EtherCAT og CAN.
I slutningen af artiklen vil der være en sammenligningstabel med egenskaberne for EtherCAT, POWERLINK, PROFINET, EtherNet/IP og ModbusTCP protokollerne.
Vi inkluderede ikke PRP, HSR, OPC UA og andre protokoller i gennemgangen, fordi Der er allerede fremragende artikler om dem på Habré af vores medingeniører, der udvikler industrielle automationssystemer. For eksempel, и .
Lad os først definere terminologien: Industrielt Ethernet = industrielt netværk, Fieldbus = feltbus. I russisk industriel automation er der forvirring i termer relateret til feltbussen og det industrielle netværk på lavere niveau. Ofte kombineres disse udtryk til et enkelt, vagt koncept kaldet "lavere niveau", som omtales som både en feltbus og en bus på underniveau, selvom det måske slet ikke er en bus.
Hvorfor så?Denne forvirring skyldes højst sandsynligt, at i mange moderne controllere er tilslutningen af I/O-moduler ofte implementeret ved hjælp af et backplane eller en fysisk bus. Det vil sige, at visse buskontakter og stik bruges til at kombinere flere moduler til en enkelt enhed. Men sådanne knudepunkter kan til gengæld sammenkobles af både et industrielt netværk og en feltbus. I vestlig terminologi er der en klar opdeling: et netværk er et netværk, en bus er en bus. Den første er betegnet med termen Industrial Ethernet, den anden af Fieldbus. Artiklen foreslår at bruge udtrykket "industrielt netværk" og udtrykket "feltbus" om disse begreber.
Industriel netværksstandard EtherCAT, udviklet af Beckhoff
EtherCAT-protokollen og det industrielle netværk er måske en af de hurtigste metoder til datatransmission i automationssystemer i dag. EtherCAT-netværket bruges med succes i distribuerede automationssystemer, hvor interagerende noder er adskilt over lange afstande.
EtherCAT-protokollen bruger standard Ethernet-rammer til at transmittere sine telegrammer, så den forbliver kompatibel med ethvert standard Ethernet-udstyr, og faktisk kan datamodtagelse og -transmission organiseres på enhver Ethernet-controller, forudsat at den relevante software er tilgængelig.

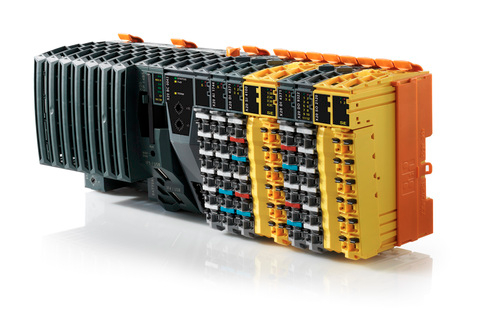
Beckhoff controller med et sæt I/O-moduler. Kilde:
Protokolspecifikationen er åben og tilgængelig, men kun inden for rammerne af udviklingsforeningen - EtherCAT Technology Group.
Sådan fungerer EtherCAT (skuespillet er fascinerende, ligesom spillet Zuma Inca):
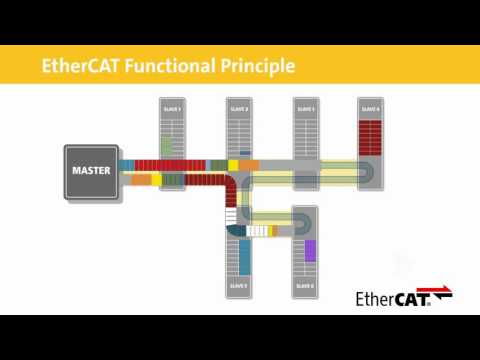
Den høje udvekslingshastighed i denne protokol - og vi kan tale om enheder på mikrosekunder - realiseres på grund af det faktum, at udviklerne nægtede at udveksle ved hjælp af telegrammer sendt direkte til en bestemt enhed. I stedet sendes et telegram til EtherCAT-netværket, adresseret til alle enheder på samme tid, hver af slaveknuderne til indsamling og transmission af information (de kaldes også ofte OSO - objektkommunikationsenhed) tager fra det "on the fly" de data, der var beregnet til det, og indsætter i et telegram de data, som han er klar til at levere til udveksling. Telegrammet sendes derefter til den næste slaveknude, hvor den samme operation sker. Efter at have passeret alle styreenhederne, returneres telegrammet til hovedcontrolleren, som baseret på data modtaget fra slaveanordningerne implementerer styrelogikken, igen interagerer gennem telegrammet med slaveknuderne, som afgiver et styresignal til udstyret.
Et EtherCAT-netværk kan have enhver topologi, men i bund og grund vil det altid være en ring - på grund af brugen af fuld duplekstilstand og to Ethernet-stik. På denne måde vil telegrammet altid blive transmitteret sekventielt til hver enhed på bussen.
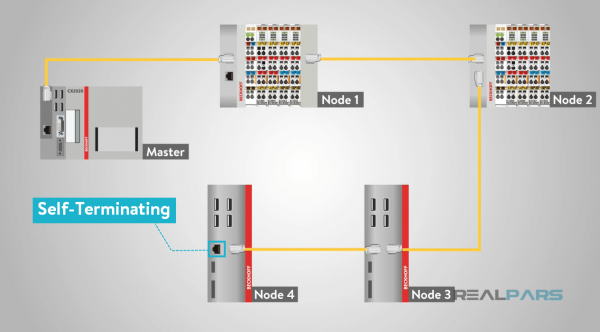
Skematisk repræsentation af et Ethercat-netværk med flere noder. Kilde:
EtherCAT-specifikationen indeholder i øvrigt ikke begrænsninger på det fysiske 100Base-TX-lag, så implementering af protokollen er mulig baseret på gigabit og optiske linjer.
Åbne industrielle netværk og PROFIBUS/NET-standarder fra Siemens
Den tyske koncern Siemens har længe været kendt for sine programmerbare logiske controllere (PLC'er), som bruges over hele verden.
Dataudveksling mellem noder i et automatiseret system styret af Siemens udstyr udføres både via en feltbus kaldet PROFIBUS og i PROFINET industrielle netværk.
PROFIBUS-bussen anvender et specielt to-lederkabel med DB-9-stik. Siemens har den i lilla, men vi har set andre i praksis :). For at forbinde flere noder kan et stik forbinde to kabler. Den har også en kontakt til terminalmodstanden. Terminalmodstanden skal være tændt ved netværkets slutenheder, hvilket indikerer, at dette er den første eller sidste enhed, og efter den er der intet, kun mørke og tomhed (alle rs485'er fungerer sådan). Hvis du tænder for en modstand på det mellemliggende stik, vil afsnittet efter det blive slukket.

PROFIBUS kabel med tilslutningsstik. Kilde:
PROFINET netværket bruger et analogt parsnoet kabel, normalt med RJ-45 stik, kablet er farvet grønt. Hvis topologien i PROFIBUS er en bus, så kan topologien i PROFINET-netværket være hvad som helst: en ring, en stjerne, et træ eller alt sammen.
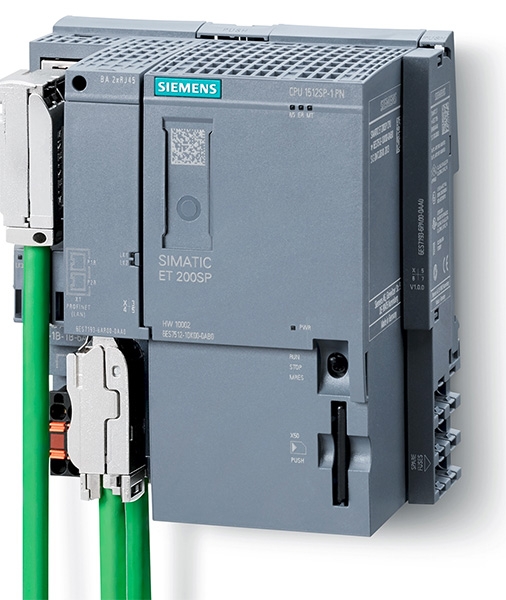
Siemens controller med tilsluttet PROFINET kabel. Kilde: w3.siemens.com
Der er flere kommunikationsprotokoller på PROFIBUS-bussen og i PROFINET-netværket.
For PROFIBUS:
- PROFIBUS DP - implementeringen af denne protokol involverer kommunikation med eksterne slave-enheder; i tilfælde af PROFINET svarer denne protokol til PROFINET IO-protokollen.
- PROFIBUS PA er i det væsentlige det samme som PROFIBUS DP, kun brugt til eksplosionssikre versioner af datatransmission og strømforsyning (analogt med PROFIBUS DP med forskellige fysiske egenskaber). For PROFINET eksisterer der endnu ikke en eksplosionssikker protokol svarende til PROFIBUS.
- PROFIBUS FMS - designet til dataudveksling med systemer fra andre producenter, der ikke kan bruge PROFIBUS DP. PROFIBUS FMS-analogen i PROFINET-netværket er PROFINET CBA-protokollen.
For PROFINET:
- PROFINET IO;
- PROFINET CBA.
PROFINET IO-protokollen er opdelt i flere klasser:
- PROFINET NRT (ikke-realtid) bruges i applikationer, hvor timing ikke er kritisk. Det bruger Ethernet-dataoverførselsprotokollen. TCP/IPsåvel som UDP/IP.
- PROFINET RT (realtid) - her implementeres I/O-dataudveksling ved hjælp af Ethernet-rammer, men diagnosticerings- og kommunikationsdata overføres stadig via UDP/IP.
- PROFINET IRT (Isochronous Real Time) - Denne protokol blev udviklet specifikt til motion control-applikationer og inkluderer en isokron dataoverførselsfase.
Med hensyn til implementeringen af PROFINET IRT-hard real-time protokol, for kommunikation med fjerntliggende enheder skelner den to udvekslingskanaler: isokron og asynkron. En isokron kanal med en fast udvekslingscykluslængde bruger clock-synkronisering og transmitterer tidskritiske data; andet niveau telegrammer bruges til transmission. Transmissionsvarigheden i en isokron kanal overstiger ikke 1 millisekund.
Den asynkrone kanal transmitterer såkaldte realtidsdata, som også adresseres via en MAC-adresse. Derudover transmitteres forskellige diagnostiske og supplerende oplysninger ovenpå. TCP/IPHverken realtidsdata eller især ingen anden information kan naturligvis afbryde den isokrone cyklus.
Det udvidede sæt af PROFINET IO-funktioner er ikke nødvendigt for ethvert industrielt automatiseringssystem, så denne protokol er skaleret til et specifikt projekt under hensyntagen til overensstemmelsesklasser eller overensstemmelsesklasser: CC-A, CC-B, CC-CC. Overholdelsesklasser giver dig mulighed for at vælge feltenheder og backbone-komponenter med den mindst nødvendige funktionalitet.
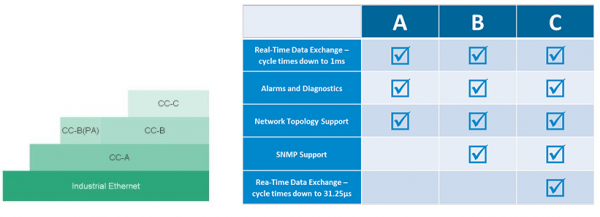
Kilde:
Den anden udvekslingsprotokol i PROFINET-netværket - PROFINET CBA - bruges til at organisere industriel kommunikation mellem udstyr fra forskellige producenter. Hovedproduktionsenheden i IAS-systemer er en bestemt enhed kaldet en komponent. Denne komponent er normalt en samling af mekaniske, elektriske og elektroniske dele af en enhed eller installation, samt tilhørende applikationssoftware. For hver komponent vælges et softwaremodul, der indeholder en komplet beskrivelse af denne komponents grænseflade i overensstemmelse med kravene i PROFINET-standarden. Hvorefter disse softwaremoduler bruges til at udveksle data med enheder.
B&R Ethernet POWERLINK-protokol
Powerlink-protokollen blev udviklet af det østrigske firma B&R i begyndelsen af 2000'erne. Dette er endnu en implementering af en realtidsprotokol oven på Ethernet-standarden. Protokolspecifikationen er tilgængelig og distribueres frit.
Powerlink-teknologien bruger en såkaldt mixed polling-mekanisme, når al interaktion mellem enheder er opdelt i flere faser. Særligt kritiske data overføres i den isokrone udvekslingsfase, for hvilken den nødvendige responstid er konfigureret; de resterende data transmitteres, når det er muligt, i den asynkrone fase.
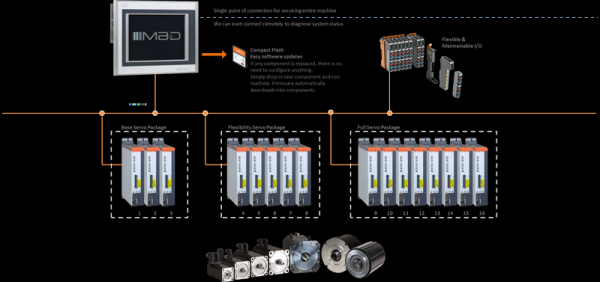
B&R controller med et sæt I/O-moduler. Kilde: br-automation.com
Protokollen blev oprindeligt implementeret oven på det fysiske 100Base-TX lag, men senere blev der udviklet en gigabit implementering.
Powerlink-protokollen bruger en kommunikationsplanlægningsmekanisme. En bestemt markør eller kontrolmeddelelse sendes til netværket, ved hjælp af hvilken det bestemmes, hvilke af enhederne der i øjeblikket har tilladelse til at udveksle data. Kun én enhed kan have adgang til centralen ad gangen.
Skematisk repræsentation af et Ethernet POWERLINK-netværk med flere noder.
I den isokrone fase sender pollingcontrolleren sekventielt en anmodning til hver knude, hvorfra den skal modtage kritiske data.
Den isokrone fase udføres, som allerede nævnt, med en justerbar cyklustid. I den asynkrone fase af udvekslingen bruges IP-protokolstakken, controlleren anmoder om ikke-kritiske data fra alle noder, som sender et svar efterhånden som de får adgang til at sende til netværket. Tidsforholdet mellem de isokrone og asynkrone faser kan justeres manuelt.
Rockwell Automation Ethernet/IP-protokol
EtherNet/IP-protokollen blev udviklet med aktiv deltagelse af det amerikanske firma Rockwell Automation i 2000. Den bruger TCP- og UDP IP-stakken og udvider den til brug i industriel automation. Den anden del af navnet står, i modsætning til hvad mange tror, ikke for Internet Protocol, men for Industrial Protocol. UDP IP bruger CIP-kommunikationsstakken (Common Interface Protocol), som også bruges i ControlNet/DeviceNet-netværk og er implementeret oven på TCP/IP.
EtherNet/IP-specifikationen er offentligt tilgængelig og frit tilgængelig. Ethernet/IP-netværkstopologien kan være vilkårlig og omfatte ring, stjerne, træ eller bus.
Ud over standardfunktionerne i HTTP-, FTP-, SMTP-, EtherNet/IP-protokollerne implementerer den overførsel af tidskritiske data mellem polling-controlleren og I/O-enheder. Transmissionen af ikke-tidskritiske data leveres af TCP-pakker, og den tidskritiske levering af cykliske kontroldata udføres via UDP-protokollen.
For at synkronisere tid i distribuerede systemer bruger EtherNet/IP CIPsync-protokollen, som er en udvidelse af CIP-kommunikationsprotokollen.
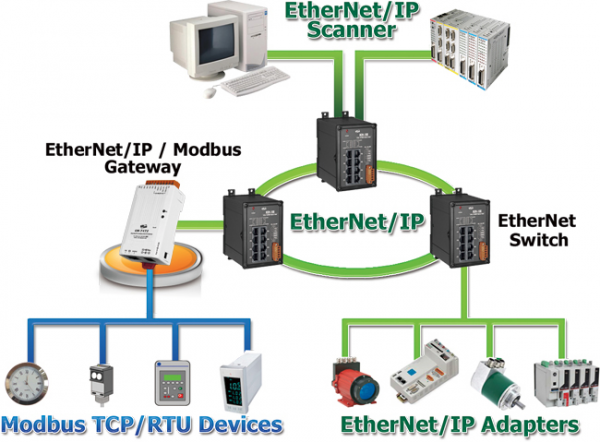
Skematisk fremstilling af et Ethernet/IP-netværk med flere noder og tilslutning af Modbus-enheder. Kilde:
For at forenkle EtherNet/IP-netværksopsætningen leveres de fleste standardautomatiseringsenheder med foruddefinerede konfigurationsfiler.
Implementering af FBUS-protokollen hos Fastwel
Vi overvejede i lang tid, om vi skulle inkludere det russiske firma Fastwel på denne liste med dens indenlandske implementering af FBUS-industriprotokollen, men så besluttede vi at skrive et par afsnit for en bedre forståelse af realiteterne ved importsubstitution.
Der er to fysiske implementeringer af FBUS. En af dem er en bus, hvor FBUS-protokollen kører oven på RS485-standarden. Derudover er der en implementering af FBUS i et industrielt Ethernet-netværk.
FBUS kan næppe kaldes en højhastighedsprotokol; responstiden afhænger i høj grad af antallet af I/O-moduler på bussen og udvekslingsparametrene, typisk fra 0,5 til 10 millisekunder. En enkelt FBUS-slavenude kan kun indeholde 64 I/O-moduler. For en fieldbus må kabellængden ikke overstige 1 meter, så distribuerede systemer er udelukket. Jo, det er det, men kun når man bruger et industrielt FBUS-netværk over TCP/IP, hvilket betyder en flere gange øget pollingtid. Busforlængere kan bruges til at forbinde modulerne, hvilket muliggør praktisk placering i automationsskabet.
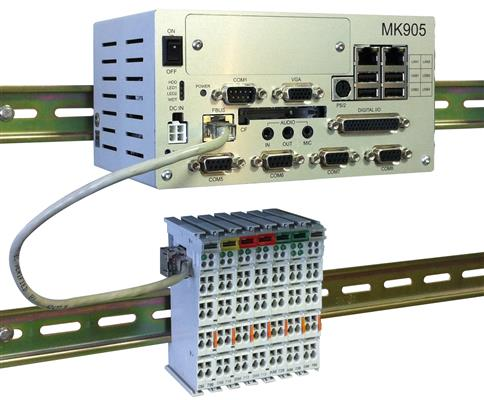
Fastwel controller med tilsluttede I/O moduler. Kilde:
Total: hvordan alt dette bruges i praksis i automatiserede processtyringssystemer
Naturligvis er mangfoldigheden af typer af moderne industrielle dataoverførselsprotokoller meget større, end vi har beskrevet i denne artikel. Nogle er bundet til en bestemt producent, nogle er tværtimod universelle. Ved udvikling af automatiserede proceskontrolsystemer (APCS) vælger ingeniøren de optimale protokoller under hensyntagen til specifikke opgaver og restriktioner (tekniske og budgetmæssige).
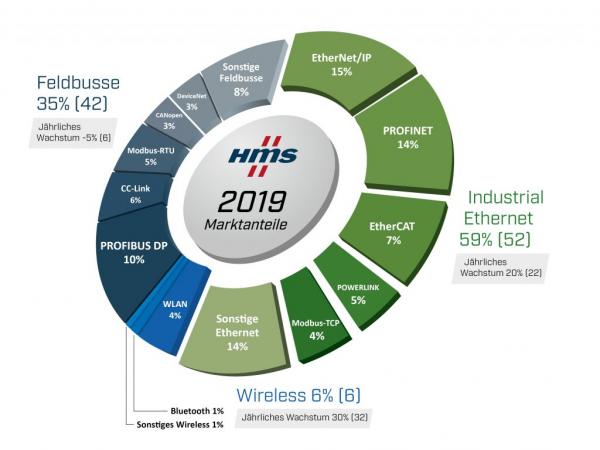
Hvis vi taler om udbredelsen af en bestemt udvekslingsprotokol, kan vi give et diagram over virksomheden HMS Networks AB, som illustrerer markedsandelene for forskellige udvekslingsteknologier i industrielle netværk.
Kilde:
Som det kan ses på diagrammet, indtager PRONET og PROFIBUS fra Siemens de førende positioner.
Interessant nok for 6 år siden .
Tabellen nedenfor indeholder oversigtsdata om de beskrevne udvekslingsprotokoller. Nogle parametre, for eksempel ydeevne, er udtrykt i abstrakte termer: høj / lav. Numeriske ækvivalenter kan findes i artikler om præstationsanalyse.
| EtherCAT | POWERLINK | PROFINET | EtherNet / IP | ModbusTCP |
Fysisk lag | 100/1000 BASE-TX | 100/1000 BASE-TX | 100/1000 BASE-TX | 100/1000 BASE-TX | 100/1000 BASE-TX |
Dataniveau | Kanal (Ethernet-rammer) | Kanal (Ethernet-rammer) | Kanal (Ethernet-rammer), Netværk/transport (TCP/IP) | Netværk/transportTCP/IP) | Netværk/transportTCP/IP) |
Realtidssupport | Ja | Ja | Ja | Ja | Nej |
Ydelse | Høj | Høj | IRT – høj, RT – medium | Gennemsnitlig | Низкая |
Kabellængde mellem noder | 100m | 100m/2km | 100m | 100m | 100m |
Overførselsfaser | Nej | Isokron + asynkron | IRT – isokron + asynkron, RT – asynkron | Nej | Nej |
Antal noder | 65535 | 240 | Netværksbegrænsning TCP/IP | Netværksbegrænsning TCP/IP | Netværksbegrænsning TCP/IP |
Kollisionsopløsning | Ringtopologi | Ursynkronisering, transmissionsfaser | Ringtopologi, transmissionsfaser | Afbrydere, stjernetopologi | Afbrydere, stjernetopologi |
Hot swap | Nej | Ja | Ja | Ja | Afhængig af implementeringen |
Udgifter til udstyr | Низкая | Низкая | Høj | Gennemsnitlig | Низкая |
Anvendelsesområderne for de beskrevne udvekslingsprotokoller, feltbusser og industrielle netværk er meget forskellige. Fra den kemiske industri og bilindustrien til rumfartsteknologi og elektronikfremstilling. Højhastighedsudvekslingsprotokoller er efterspurgte i realtidspositioneringssystemer til forskellige enheder og inden for robotteknologi.
Hvilke protokoller arbejdede du med, og hvor anvendte du dem? Del din oplevelse i kommentarerne. 🙂
Kilde: www.habr.com
