


Dieser Artikel eröffnet eine Reihe von Beiträgen, die sich mit automatisierten Methoden zur Einstellung von PID-Reglern in der Simulink-Umgebung befassen. Heute schauen wir uns an, wie man mit der Anwendung PID Tuner arbeitet.
Einführung
Der am häufigsten in der Industrie verwendete Regulatortyp in geschlossenen Regelungssystemen sind die PID-Regler. Während die Ingenieure die Struktur und Funktionsweise des Reglers aus ihrer Studienzeit kennen, bleibt die Einstellung, also die Berechnung der Regelkoeffizienten, nach wie vor eine Herausforderung. Es gibt eine Vielzahl von Literatur, sowohl aus dem Ausland (z.B. [1, 2]) als auch aus dem Inland (z.B. [3, 4]), in der die Reglereinstellungen in einer komplexen Sprache der Regelungstechnik erklärt werden.
In dieser Artikelreihe werden automatisierte Methoden zur Einstellung von PID-Reglern mit den Tools der Simulink-Umgebung beschrieben, wie zum Beispiel:
- PID Tuner,
- Response Optimizer,
- Control System Tuner,
- Frequency Response Based PID Tuner,
- Closed-Loop PID Autotuner.
Das Steuerungssystem basiert auf einem Elektromotor mit Permanentmagnetfeld und arbeitet gemeinsam mit einem Getriebe für eine träge Last mit den folgenden Parametern:
- Versorgungsspannung des Motors,
 ;
; - Aktivwiderstand der Ankerwicklung des Motors, ;
- Induktiver Widerstand der Ankerwicklung des Motors, ;
- Drehmomentfaktor des Motors, ;
- Trägheitsmoment des Motorrotors, .
 ;
;  ;
;  ;
;  ;
;  .
.Last- und Getriebeparameter:
- Trägheitsmoment der Last, ;
- Übersetzungsverhältnis des Getriebes, .
 ;
;  .
.Die Artikel enthalten nahezu keine mathematischen Formeln, jedoch wäre es wünschenswert, dass der Leser über grundlegende Kenntnisse in der Regelungstheorie verfügt und Erfahrung im Modellieren in der Simulink-Umgebung hat, um das vorgestellte Material zu verstehen.
Modell des Systems
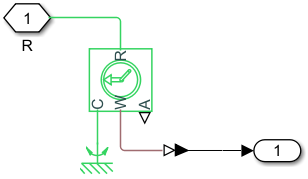
Betrachten wir ein lineares Regelungssystem für die Winkelgeschwindigkeit eines verfolgenden Elektromotors, dessen vereinfachte Strukturdiagramm unten dargestellt ist.

Gemäß der angegebenen Struktur wurde in der Simulink-Umgebung ein Modell eines solchen Systems erstellt.

Die Modelle des elektrischen Antriebs (Subsystem Electric actuator) und der Trägheitslast (Subsystem Load) wurden mit Hilfe von Blöcken der physikalischen Modellierungsbibliothek erstellt. :
- Modell des elektrischen Antriebs,
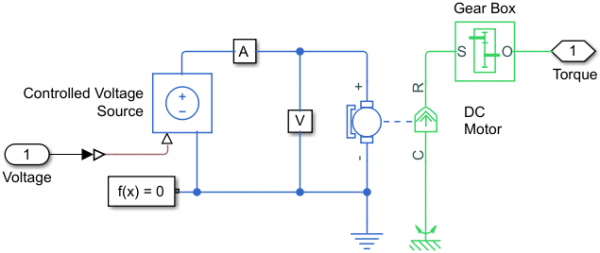
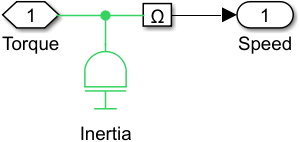
- Modell der Trägheitslast.
Die Modelle des elektrischen Antriebs und der Last enthalten auch Subsysteme zur Messung verschiedener physikalischer Größen:
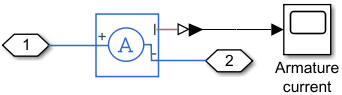
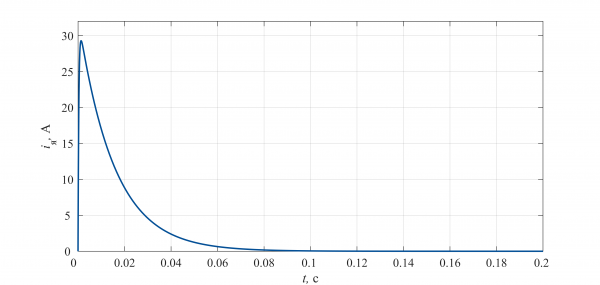
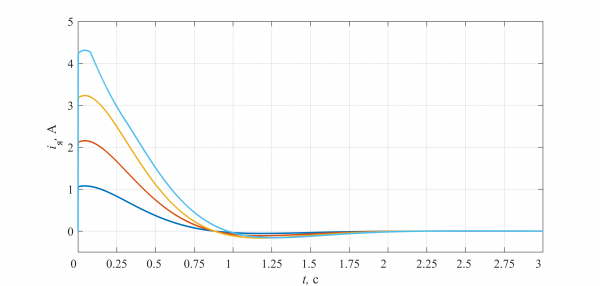
- Strom, der durch die Wicklung des Motorbobbins fließt (Subsystem A),
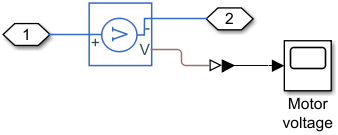
- Spannung an seiner Wicklung (Subsystem V),
- Winkelgeschwindigkeit des Steuerobjekts (Subsystem Ω).
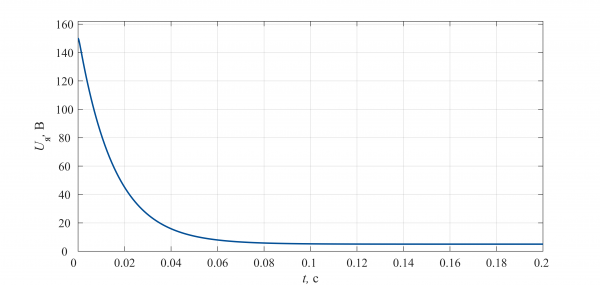
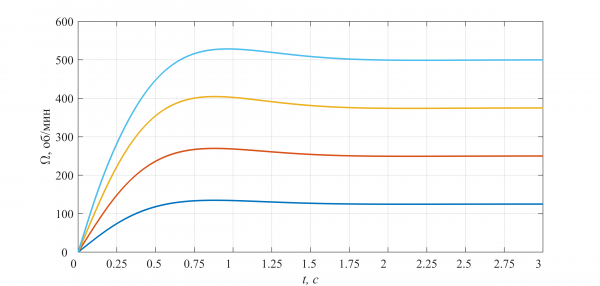
Vor der Einstellung der PID-Reglerparameter starten wir das Modell zur Berechnung, unter der Annahme der Übertragungsfunktion des Reglers.  Die Ergebnisse der Modellierung mit einem Eingangssignal von 150 U/min sind unten dargestellt.
Die Ergebnisse der Modellierung mit einem Eingangssignal von 150 U/min sind unten dargestellt.
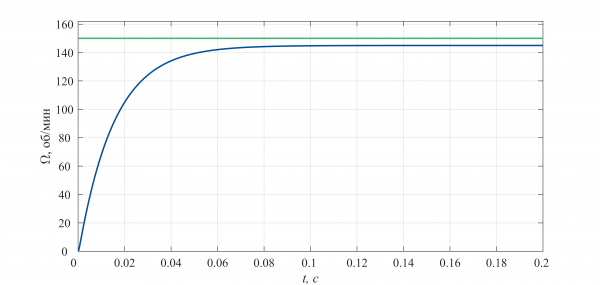
Aus der Analyse der dargestellten Grafiken ist ersichtlich, dass:
- Die Ausgangskoordinate des Regelungssystems den festgelegten Wert nicht erreicht, d.h. im System besteht ein statischer Fehler.
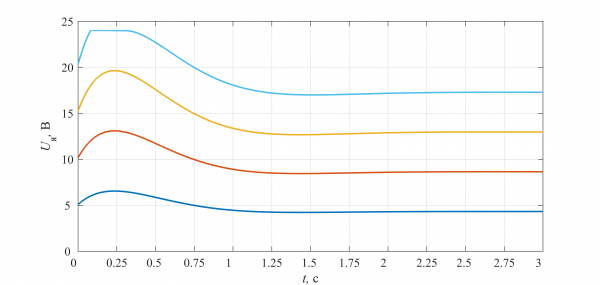
- Die Spannung an den Motorwicklungen erreicht zu Beginn der Modellierung 150 V, was dazu führen wird, dass er ausfällt, da eine Spannung von mehr als der Nennspannung (24 V) an seine Wicklung angelegt wird.
Die Reaktion des Systems auf einen einzelnen Impuls muss folgenden Anforderungen entsprechen:
- Überschwingen (Overshoot) von maximal 10%,
- Anstiegszeit (Rise time) von weniger als 0,8 s,
- Einstellzeit (Settling time) von weniger als 2 s.
Darüber hinaus muss der Regler die Spannung, die an die Wicklung des Motors angelegt wird, auf den Wert der Versorgungsspannung begrenzen.
Regler konfigurieren
Die Einstellungen des Reglers erfolgen mit dem Tool , das direkt im Einstellungsfenster des PID-Controllers verfügbar ist.
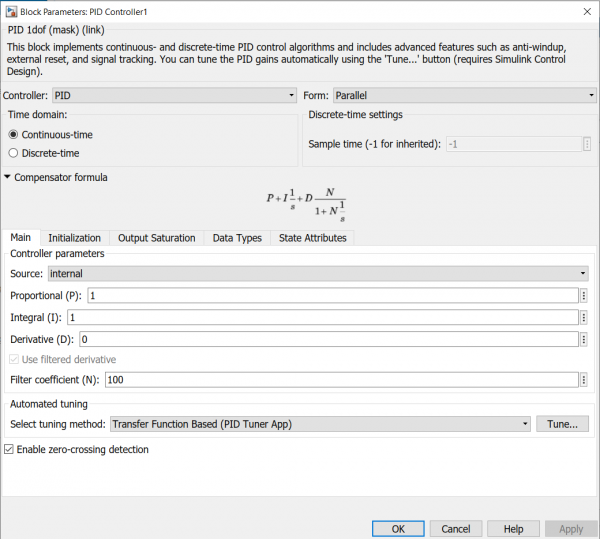
Die Anwendung wird durch Klicken auf den Button Tune…, der sich in der Automatisierte AbstimmungLeiste befindet. Es ist zu beachten, dass vor der Durchführung der Einstellung des Reglers dessen Typ (P, PI, PD usw.) sowie sein Typ (analog oder diskret) ausgewählt werden muss.
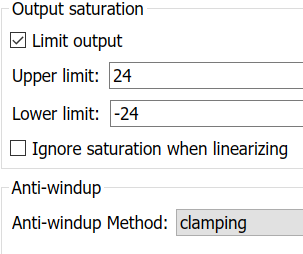
Da eine der Anforderungen die Begrenzung seiner Ausgangskoordinate (Spannung an der Wicklung des Motors) ist, sollte ein zulässiger Spannungsbereich festgelegt werden. Dazu:
- Wechseln Sie zur Registerkarte Output Saturation.
- Drücken Sie die Flaggtaste Limit output, woraufhin die Felder für die Festlegung der oberen (Upper limit) und unteren (Lower limit) Grenze des Ausgangswertes aktiviert werden.
- Wir setzen die Grenzen des Bereichs fest.
Für die korrekte Funktion des Reglerblocks innerhalb des Systems sind Methoden erforderlich, die auf die Bekämpfung der integralen Sättigung abzielen. Im Block sind zwei Methoden implementiert: Back-Calculation und Clamping. Detaillierte Informationen zu diesen Methoden finden Sie . Das Dropdown-Menü zur Auswahl der Methode befindet sich in der Leiste Anti-Windup.
In diesem Fall schreiben wir die Werte 24 und -24 in die Felder Obere Grenze und Untere Grenze und verwenden außerdem die Methode Clamping, um integrale Sättigung zu vermeiden.
Es ist zu beachten, dass sich das Aussehen des Reglerblocks geändert hat: Ein Sättigungszeichen erscheint neben dem Ausgangsport des Blocks.
Danach akzeptieren wir alle Änderungen, indem wir auf die Schaltfläche klicken Anwenden, und kehren zum Tab Haupt und klicken wir auf die Schaltfläche Tune…zurück, wodurch ein neues Fenster der Anwendung PIDTuner geöffnet wird.
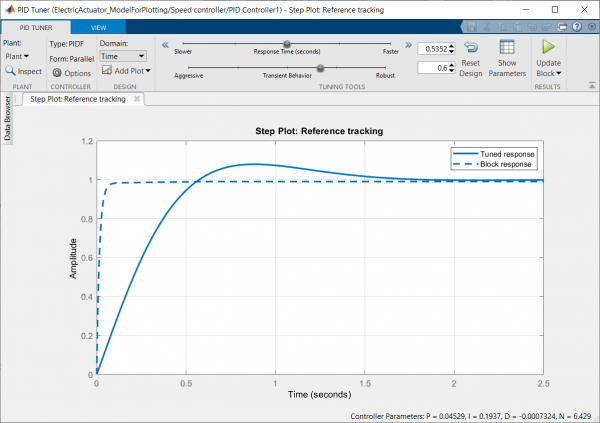
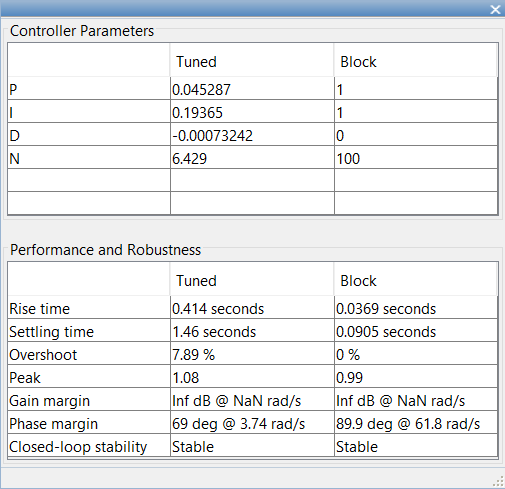
Im grafischen Bereich des Fensters werden zwei Übergangsprozesse angezeigt: der aktuelle.Reglerparameter, d. h. für den nicht eingestellten Regler, und die automatisch gewählten Werte. Neue Parameterwerte können eingesehen werden, indem Sie auf die Schaltfläche klicken Parameter anzeigen, die sich in der Werkzeugleiste befindet. Nach dem Drücken der Schaltfläche erscheinen zwei Tabellen: die ausgewählten Reglerparameter (Controller Parameters) und die durchgeführten Bewertungen der Merkmale des Übergangsprozesses bei den ausgewählten Parametern (Performance and Robustness).
Wie aus den Werten der zweiten Tabelle ersichtlich ist, erfüllen die automatisch berechneten Reglerkoeffizienten alle Anforderungen.
Die Einstellung des Reglers wird durch Drücken der Schaltfläche mit dem grünen Dreieck rechts neben der Schaltfläche abgeschlossen Parameter anzeigen, nach dem die neuen Parameterwerte automatisch in den entsprechenden Feldern im Einstellungsfenster des PID Controllers aktualisiert werden.
Die Ergebnisse der Systemmodellierung mit dem eingestellten Regler für mehrere Eingangssignale sind unten dargestellt. Bei höheren Niveaus der Eingangssignale (blaue Linie) wird das System im Spannungssättigungsmodus arbeiten.
Es ist wichtig zu beachten, dass das Werkzeug PID Tuner die Reglerkoeffizienten anhand des linearisierten Modells auswählt. Daher müssen die Parameter bei einem Wechsel zu einem nichtlinearen Modell präzisiert werden. In diesem Fall kann die Anwendung verwendet werden. .
Literatur
- Handbuch der PI- und PID-Reglerabstimmungsregeln. Aidan O’Dwyer
- PID-Regelungssystemdesign und automatische Abstimmung mit MATLAB, Simulink. Wang L.
- PID-Regelung in einfacher Darstellung. Karpow W.E.
- PID-Regler. Fragen zur Umsetzung. Teile 1, 2. Denisenko W.
Quelle: habr.com
