

Ich veröffentliche das erste Kapitel der Vorlesungen zur Theorie der automatischen Steuerung, nach denen Ihr Leben nie wieder dasselbe sein wird.
Die Vorlesungen im Kurs "Steuerung technischer Systeme" werden von Oleg Stepanovich Kozlov am Institut für "Kernreaktoren und Energiestellungen", Fakultät für "Energietechnik" der MGTU benannt nach N.E. Bauman, gehalten. Dafür gebührt ihm großer Dank.
Diese Vorlesungen werden gerade als Buch veröffentlicht, und da hier Fachleute für TAU, Studierende und einfach Interessierte am Thema sind, ist jede Kritik willkommen.

1. Grundbegriffe der Regelungstechnik von technischen Systemen
1.1. Ziele, Prinzipien der Steuerung, Arten von Steuerungssystemen, grundlegende Definitionen, Beispiele
Die Entwicklung und Verbesserung der Industrieproduktion (Energie, Transport, Maschinenbau, Raumfahrttechnik usw.) erfordern eine kontinuierliche Steigerung der Maschinen- und Aggregateproduktivität, die Verbesserung der Produktqualität, die Senkung der Kosten und besonders im Bereich der Kernenergie eine deutliche Erhöhung der Sicherheit (kerntechnisch, strahlenschutztechnisch usw.) beim Betrieb von Kernkraftwerken und kerntechnischen Anlagen.
Die Umsetzung der festgelegten Ziele ist ohne die Einführung moderner Leitungssysteme nicht möglich, wobei sowohl automatisierte Systeme (unter Einbeziehung eines menschlichen Operators) als auch automatische Systeme (ohne menschliche Bedienung) berücksichtigt werden müssen.
Definition: Management ist die Organisation eines bestimmten technologischen Prozesses, die die Erreichung des gesteckten Ziels gewährleistet.
Die Managementtheorie ist ein Bereich der modernen Wissenschaft und Technik. Sie basiert sowohl auf fundamentalen (allgemeinwissenschaftlichen) Disziplinen (z. B. Mathematik, Physik, Chemie usw.) als auch auf angewandten Disziplinen (Elektronik, Mikroprozessortechnik, Programmierung usw.).
Jeder Managementprozess (automatisiert) besteht aus den folgenden grundlegenden Phasen (Elementen):
- Erfassung von Informationen über die Steuerungsaufgabe;
- Erfassung von Informationen über die Steuerungsergebnisse;
- Analyse der erfassten Informationen;
- Durchführung der Entscheidung (Einwirkung auf das Objekt der Steuerung).
Um den Steuerungsprozess zu realisieren, muss das Steuerungssystem (SS) folgendes haben:
- Informationsquellen zur Steuerungsaufgabe;
- Informationsquellen zu den Steuerungsergebnissen (verschiedene Sensoren, Messgeräte, Detektoren usw.);
- Geräte zur Analyse der gesammelten Informationen und zur Entscheidungsfindung;
- Aktoren, die auf das Steuerungsobjekt einwirken, bestehend aus: Regler, Motoren, Verstärkungs- und Umwandlungsgeräten usw.
Definition: Wenn das Steuerungssystem (SS) alle oben genannten Teile enthält, ist es ein geschlossener Regelkreis.
Definition: Die Steuerung eines technischen Objekts unter Verwendung von Informationen über die Steuerungsergebnisse wird als Prinzip der Rückkopplung bezeichnet.
Schematisch kann ein solches Steuerungssystem dargestellt werden als:
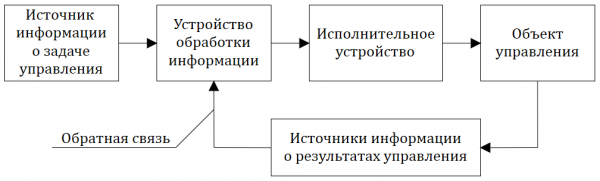
Abb. 1.1.1 — Struktur des Steuerungssystems (SS)
Wenn das Steuerungssystem (StS) eine Strukturdiagramm hat, dessen Aussehen mit Abbildung 1.1.1 übereinstimmt, und ohne menschliches (Bediener) Eingreifen funktioniert, wird es bezeichnet als automatisches Steuerungssystem (ASS).
Wenn das StS mit menschlichem (Bediener) Eingreifen funktioniert, wird es als bezeichnet automatisiertes StS.
Wenn die Steuerung eine vorgegebene Regel für die Veränderung des Objekts über die Zeit unabhängig von den Ergebnissen der Steuerung gewährleistet, erfolgt diese Steuerung im offenen Regelkreis, und die Steuerung selbst wird genannt programmierte Steuerung.
Zu den Systemen, die im offenen Regelkreis arbeiten, gehören industrielle Automaten (Förderanlagen, Rotationslinien usw.), Werkzeugmaschinen mit numerischer Steuerung (CNC): siehe Beispiel in Abbildung 1.1.2.
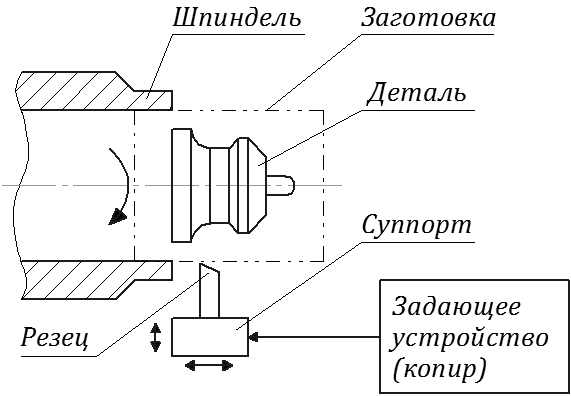
Abbildung 1.1.2 — Beispiel für programmierte Steuerung
Das Steuergerät kann beispielsweise auch als „Kopierer“ fungieren.
Da in diesem Beispiel keine Sensoren (Messgeräte) vorhanden sind, die das hergestellte Teil kontrollieren, kann das gesetzte Ziel (Herstellung des Teils) nicht erreicht werden, wenn beispielsweise das Werkzeug falsch eingestellt oder beschädigt ist. In der Regel ist bei Systemen dieser Art eine Ausgangskontrolle erforderlich, die lediglich Abweichungen der Maße und Formen des Teils vom gewünschten Zustand festhält.
Automatische Steuerungssysteme werden in 3 Typen unterteilt:
- Automatisierungssysteme (AS);
- Regelsysteme (RS);
- Verfolgungssysteme (VS).
RS und VS sind Teilsysteme von AS ==>  .
.
Definition: Ein Automatisierungssystem, das die Konstanz einer bestimmten physikalischen Größe (oder einer Gruppe von Größen) im zu steuernden Objekt gewährleistet, wird als Regelsystem (RS) bezeichnet.
Regelsysteme (RS) sind der am weitesten verbreitete Typ von automatischen Steuerungssystemen.
Der weltweit erste automatisierte Regler (18. Jahrhundert) – der Watt-Regler. Dieses Schema (siehe Abb. 1.1.3) wurde von Watt in England entwickelt, um eine gleichbleibende Drehgeschwindigkeit des Schwungrades der Dampmaschine aufrechtzuerhalten und somit auch die konstante Drehgeschwindigkeit des Antriebsriemens.
In diesem Schema sind die empfindlichen Elemente (Messsensoren) die "Gewichte" (Kugeln). Die „Gewichte“ (Kugeln) lassen auch das Wipphebel und anschließend das Ventil bewegen. Daher kann dieses System als ein System der direkten Regelung betrachtet werden, und der Regler ist ein Regler mit direkter Wirkung, da er gleichzeitig die Funktionen eines „Messgeräts“ und eines „Reglers“ erfüllt.
In Reglern mit direkter Wirkung wird keine zusätzliche Energiequelle benötigt, um das Regulierorgan zu bewegen.
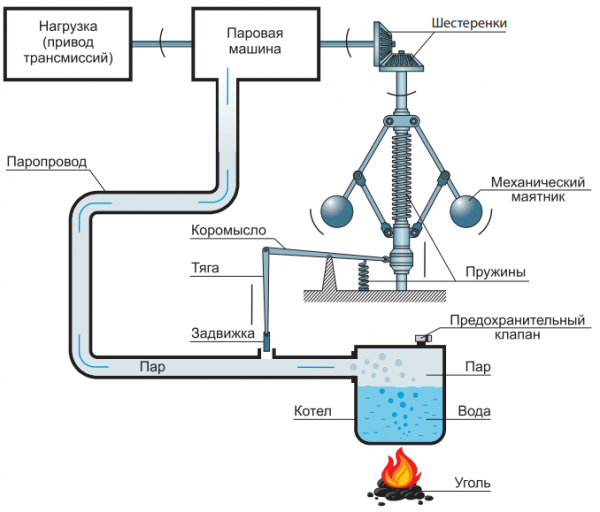
Abb. 1.1.3 – Schema des automatischen Watt-Reglers
In Systemen mit indirekter Regelung ist das Vorhandensein eines Verstärkers (z. B. eines Leistungs- oder Servomotors) sowie eines zusätzlichen Antriebsmechanismus, der beispielsweise einen Elektromotor, Servomotor, Hydrauliksystem usw. enthält, erforderlich.
Ein Beispiel für ein automatisches Steuerungssystem im vollen Sinne dieses Begriffs ist ein Steuerungssystem, das den Start einer Rakete in die Umlaufbahn steuert, wobei die steuerbare Größe beispielsweise der Winkel zwischen der Achse der Rakete und der Normalen zur Erde sein kann. ==> Siehe Abb. 1.1.4.a und Abb. 1.1.4.b
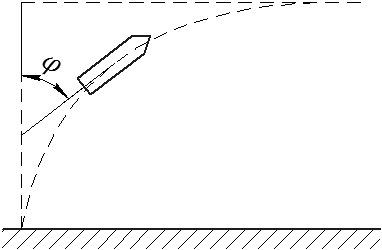
Abb. 1.1.4 (a)
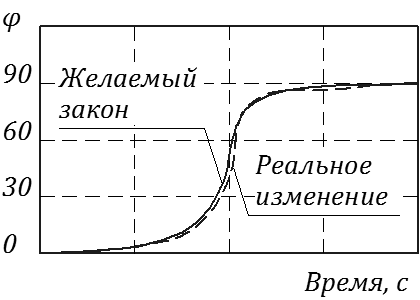
Abb. 1.1.4 (b)
1.2. Aufbau von Steuerungssystemen: einfache und mehrdimensionale Systeme
In der Theorie der technischen Systemsteuerung wird jedes System in eine Reihe von Elementen unterteilt, die in einem Netzwerk verbunden sind. Im einfachsten Fall enthält das System ein Element, an das eine Eingangsgröße (Eingang) angelegt wird und von dem die Reaktion des Systems (Ausgang) zurückkommt.
In der Theorie der technischen Systemsteuerung werden zwei Hauptansätze zur Darstellung der Elemente von Steuerungssystemen verwendet:
— in den Variablen „Eingang-Ausgang“;
— in den Zustandsgleichungen (nähere Informationen finden Sie in den Abschnitten 6…7).
Die Darstellung in den Variablen „Eingang-Ausgang“ wird normalerweise zur Beschreibung relativ einfacher Systeme verwendet, die einen „Eingang“ (eine steuernde Eingangsgröße) und einen „Ausgang“ (eine regulierte Größe) haben. Siehe Abbildung 1.2.1.
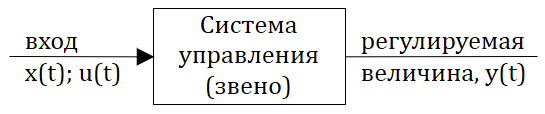
Abb. 1.2.1 – Schematische Darstellung eines einfachen Steuerungssystems
Typischerweise wird eine solche Beschreibung für technisch weniger komplexe automatisierte Steuerungssysteme (AS) verwendet.
In letzter Zeit hat die Darstellung in Zustandsvariablen zunehmend an Bedeutung gewonnen, insbesondere für technisch komplexe Systeme, einschließlich mehrdimensionaler AS. In Abb. 1.2.2 ist eine schematische Darstellung eines mehrdimensionalen automatisierten Steuerungssystems dargestellt, wobei u1(t)…um(t) – Steuereingaben (Steuerungsvektor), y1(t)…yp(t) – regulierte Parameter des AS (Ausgangsvektor).
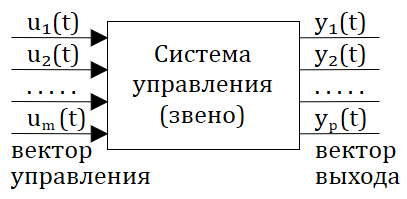
Abb. 1.2.2 – Schematische Darstellung eines mehrdimensionalen Steuerungssystems
Betrachten wir detaillierter die Struktur des AS, dargestellt durch die Variablen "Eingang-Ausgang" und bestehend aus einem Eingang (Eingangs- oder Referenzeingabe, oder Steuereingabe) und einem Ausgang (Ausgangseinfluss oder die gesteuerte (oder regulierte) Variable).
Angenommen, das strukturierte Diagramm eines solchen AS besteht aus einer bestimmten Anzahl von Elementen (gliedern). Durch die Gruppierung der Glieder nach funktionalen Gesichtspunkten (was die Glieder tun) kann das strukturierte Diagramm des AS in folgendes typisches Format gebracht werden:
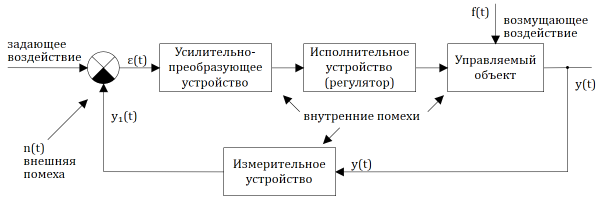
Abb. 1.2.3 — Strukturdiagramm des automatischen Steuerungssystems
Symbol ε(t) oder Variable ε(t) bezeichnet die Diskrepanz (Fehler) am Ausgang des Vergleichsgeräts, das sowohl einfache vergleichende arithmetische Operationen (häufig Subtraktion, seltener Addition) als auch komplexere Vergleichsoperationen (Prozeduren) durchführen kann.
Da y1(t) = y(t)*k1, wobei k1 — Verstärkungsfaktor, d.h. ==>
ε(t) = x(t) — y1(t) = x(t) — k1*y(t)
Die Aufgabe des Regelungssystems besteht darin (wenn es stabil ist), die Diskrepanz (Fehler) zu eliminieren. ε(t), d.h. ==> ε(t) → 0.
Es ist zu beachten, dass sowohl externe Einflüsse (steuernd, störend, Interferenzen) als auch interne Störungen auf das Regelungssystem wirken. Eine Störung unterscheidet sich von einem Einfluss durch die Stochastizität (Zufälligkeit) ihres Vorhandenseins, während ein Einfluss nahezu immer deterministisch ist.
Zur Kennzeichnung des steuernden (Ziel-)Einflusses verwenden wir entweder x(t), oder u(t).
1.3. Grundlegende Gesetze der Regelung
Wenn wir zum letzten Bild zurückkehren (Strukturdiagramm des Steuerungssystems in Abb. 1.2.3), ist es notwendig, die Rolle zu "entschlüsseln", die das verstärkende Umwandlungsgerät spielt (welche Funktionen es erfüllt).
Wenn das verstärkende Umwandlungsgerät (VU) nur die Verstärkung (oder Abschwächung) des Signals der Fehlanpassung ε(t) vornimmt, nämlich:  , wobei
, wobei  – der Proportionalitätsfaktor (im speziellen Fall
– der Proportionalitätsfaktor (im speziellen Fall  = Const), dann wird dieser Betriebsmodus der geschlossenen Regelungsanlage als Proportionalregelung (P-Regelung) bezeichnet.
= Const), dann wird dieser Betriebsmodus der geschlossenen Regelungsanlage als Proportionalregelung (P-Regelung) bezeichnet.
Wenn das VU das Ausgangssignal ε1(t) erzeugt, das proportional zur Fehlergröße ε(t) und zum Integral von ε(t) ist, d.h.  , dann wird dieser Betriebsmodus als proportional-integrierend (PI-Regelung) bezeichnet. ==>
, dann wird dieser Betriebsmodus als proportional-integrierend (PI-Regelung) bezeichnet. ==>  , wobei b – der Proportionalitätsfaktor (im speziellen Fall b = Const).
, wobei b – der Proportionalitätsfaktor (im speziellen Fall b = Const).
In der Regel wird die PI-Regelung verwendet, um die Genauigkeit der Regelung zu erhöhen.
Wenn das VU das Ausgangssignal ε1(t) erzeugt, das proportional zur Fehlergröße ε(t) und deren Ableitung ist, dann wird dieser Betriebsmodus als proportional-differenzierend (PD-Regelung) bezeichnet: ==> 
In der Regel verbessert die Verwendung der PD-Regelung die Reaktionsgeschwindigkeit des Steuerungssystems.
Wenn ein UPU ein Ausgangssignal ε1(t) erzeugt, das proportional zum Fehler ε(t), dessen Ableitung und dem Integral des Fehlers ist, dann wird dieser Modus genannt  dieser Steuerungsmodus wird genannt proportional-integral-differenzieller Steuerungsmodus (PID-Steuerung).
dieser Steuerungsmodus wird genannt proportional-integral-differenzieller Steuerungsmodus (PID-Steuerung).
PID-Steuerung ermöglicht es häufig, eine "gute" Steuerungsgenauigkeit bei "gutem" Ansprechverhalten zu gewährleisten.
1.4. Klassifikation automatischer Steuerungssysteme
1.4.1. Klassifikation nach der Art der mathematischen Beschreibung
Anhand der Art der mathematischen Beschreibung (Dynamik- und Statikgleichungen) werden automatische Steuerungssysteme (ASS) in lineare und nichtlineare Systeme (ASS oder ASP) unterteilt.
Jede „Unterklasse“ (linear und nichtlinear) wird in eine Reihe weiterer „Unterklassen“ unterteilt. Zum Beispiel unterscheiden sich lineare ASS (ASP) in der Art der mathematischen Beschreibung.
Da in diesem Semester nur die dynamischen Eigenschaften von linearen automatischen Steuerungssystemen (Regelungssystemen) behandelt werden, präsentieren wir im Folgenden die Klassifikation nach der Art der mathematischen Beschreibung für lineare ASS (ASP):
1) Lineare automatisierte Steuerungssysteme, die in den Variablen „Eingang-Ausgang“ durch gewöhnliche Differentialgleichungen (ODE) mit konstanten Koeffizienten beschrieben werden:


wobei x(t) – Eingangsgröße; y(t) – Ausgangsgröße (regulierten Größe).
Wenn die operatorische („kompakte“) Schreibweise der linearen ODE verwendet wird, kann die Gleichung (1.4.1) in folgender Form dargestellt werden:

wobei, p = d/dt – Differenzierungsoperator; L(p), N(p) – die entsprechenden linearen Differenzialoperatoren, die gleich sind:


2) Lineare automatisierte Steuerungssysteme, die durch lineare gewöhnliche Differentialgleichungen (ODE) mit variablen (zeitabhängigen) Koeffizienten beschrieben werden:


Im Allgemeinen können solche Systeme auch der Kategorie der nichtlinearen Steuerungssysteme (SAS) zugeordnet werden.
3) Lineare automatisierte Steuerungssysteme, die durch lineare Differenzengleichungen beschrieben werden:


wobei f(…) – lineare Funktion der Argumente; k = 1, 2, 3… – ganze Zahlen; Δt – Quantisierungsintervall (Diskretisierungsintervall).
Die Gleichung (1.4.4) kann in kompakter Form dargestellt werden:

In der Regel wird eine solche Beschreibung von linearen Steuerungen (SAC) in digitalen Steuerungssystemen (unter Verwendung von Computertechnik) verwendet.
4) Lineare automatische Regelungssysteme mit Verzögerung:

wobei L(p), N(p) — lineare differentielle Operatoren; τ — Zeitverzögerung oder Verzögerungskonstante.
Wenn die Operatoren L(p) und N(p) degeneriert sind (L(p) = 1; N(p) = 1), dann entspricht die Gleichung (1.4.6) der mathematischen Beschreibung der Dynamik eines idealen Verzögerungselements:

Die grafische Darstellung seiner Eigenschaften ist in Abb. 1.4.1 gezeigt.
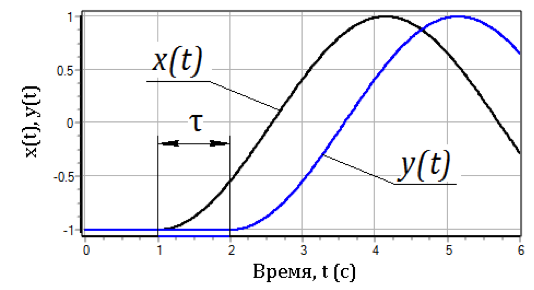
Abb. 1.4.1 — Eingangs- und Ausgangskurven eines idealen Verzögerungselements
5) Lineare automatische Regelungssysteme, die durch lineare differenzielle Gleichungen in partiellen Ableitungenbeschrieben werden. Solche SAC werden oft verteilte Regelsysteme genannt. ==> „Abstraktes“ Beispiel für eine solche Beschreibung:

Das Gleichungssystem (1.4.7) beschreibt die Dynamik eines linear verteilten SAC, d.h. die regulierte Größe hängt nicht nur von der Zeit ab, sondern auch von einer räumlichen Koordinate.
Wenn das Regelsystem ein „räumliches“ Objekt darstellt, dann ==>

wobei  hängt von der Zeit und den räumlichen Koordinaten ab, die durch den Positionsvektor definiert sind
hängt von der Zeit und den räumlichen Koordinaten ab, die durch den Positionsvektor definiert sind 
6) Regelungssysteme, beschrieben durch Systeme Differentialgleichungen oder Systeme von Gleichungen mit partiellen Ableitungen ==> und so weiter…
Eine ähnliche Klassifikation kann auch für nichtlineare Regelungssysteme angeboten werden (NRS)…
Für lineare Systeme gelten die folgenden Anforderungen:
- Linearität der statischen Kennlinie des Regelungssystems;
- Linearität der Dynamikgleichung, d.h. die Variablen treten nur in linearer Kombination in die Dynamikgleichung ein. Die statische Kennlinie bezeichnet die Abhängigkeit des Ausgangs von der Größe des Eingangsimpulses im stationären Zustand (wenn alle Übergangsprozesse abgeklungen sind).
Für Systeme, die durch lineare gewöhnliche Differentialgleichungen mit konstanten Koeffizienten beschrieben werden, wird die statische Kennlinie aus der Dynamikgleichung (1.4.1) gewonnen, indem alle nichtstationären Terme auf null gesetzt werden ==>
In Abb. 1.4.2 sind Beispiele für lineare und nichtlineare statische Kennlinien von Regelungssystemen dargestellt.

Abb. 1.4.2 — Beispiele für statische lineare und nichtlineare Kennlinien
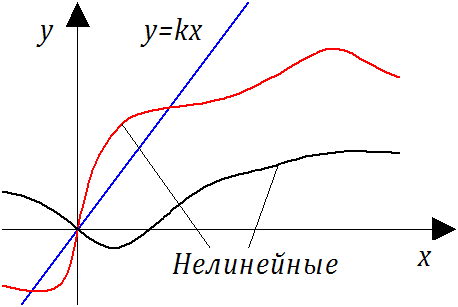
Abb. 1.4.2 — Beispiele für statische lineare und nichtlineare Eigenschaften
Die Nichtlinearität der Mitglieder, die zeitabhängige Ableitungen in den Dynamikgleichungen enthalten, kann bei der Verwendung nichtlinearer mathematischer Operationen (*, /,  ,
,  , sin, ln usw.) auftreten. Wenn wir zum Beispiel die Dynamikgleichung eines gewissen „abstrakten“ Regelungssystems betrachten,
, sin, ln usw.) auftreten. Wenn wir zum Beispiel die Dynamikgleichung eines gewissen „abstrakten“ Regelungssystems betrachten,

stellen wir fest, dass in dieser Gleichung bei linearer statischer Charakteristik  die zweiten und dritten Terme (dynamische Mitglieder) auf der linken Seite der Gleichung — nichtlineare, weshalb das durch eine solche Gleichung beschriebene Regelungssystem nichtlinear ist im dynamischen Sinne..
die zweiten und dritten Terme (dynamische Mitglieder) auf der linken Seite der Gleichung — nichtlineare, weshalb das durch eine solche Gleichung beschriebene Regelungssystem nichtlinear ist im dynamischen Sinne..
1.4.2. Klassifikation nach Art der übertragenen Signale
Nach der Art der übertragenen Signale werden Regelungssysteme (oder Regelungsanlagen) unterteilt in:
- stetige Systeme (Systeme kontinuierlicher Aktion);
- Relais-Systeme (Systeme mit Relaisaktion);
- diskrete Aktionssysteme (Impuls- und digitale Systeme).
Ein stetiges Aktionssystem wird als solches bezeichnet, bei dem in jedem Glied einem kontinuierlichen Änderung des Eingangssignals über die Zeit ein kontinuierliches entspricht kontinuierlich Die Änderung des Ausgangssignals kann variabel sein. Damit das Steuerungssystem kontinuierlich ist, müssen die statischen Eigenschaften aller Teile kontinuierlich sein.
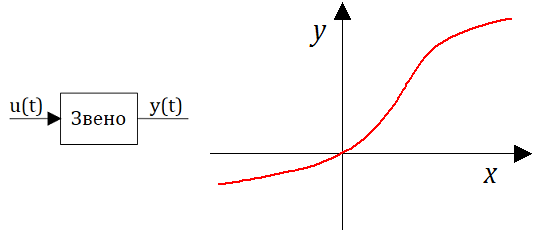
Abb. 1.4.3 — Beispiel eines kontinuierlichen Systems
Ein stetiges von reläischem Handeln wird als Steuerungssystem bezeichnet, bei dem die Ausgangsgröße in wenigstens einem Teil bei kontinuierlicher Änderung der Eingangsgröße in bestimmten Momenten des Regelprozesses „sprunghaft“ in Abhängigkeit von der Eingangsgröße variiert. Die statische Kennlinie eines solchen Teils weist Sprungstellen oder mit Unterbrechungen auf.
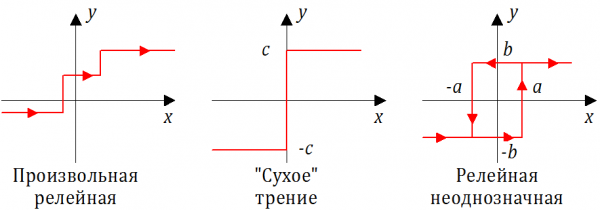
Abb. 1.4.4 — Beispiele für reläische statische Kennlinien
Ein stetiges diskretem Handeln wird als System bezeichnet, bei dem die Ausgangsgröße in wenigstens einem Teil bei kontinuierlicher Änderung der Eingangsgröße in Form separater Impulse, die mit einem gewissen Zeitabstand auftreten.
Ein Teil, der ein kontinuierliches Signal in ein diskretes Signal umwandelt, wird als Impulsumformer bezeichnet. Eine solche Signalübertragung findet in Steuerungssystemen mit einem Computer oder Controller statt.
Die folgenden Methoden (Algorithmen) zur Umwandlung eines kontinuierlichen Eingangssignals in ein impulsartiges Ausgangssignal werden am häufigsten eingesetzt:
- Amplituden-Pulsmodulation (APM);
- Breitband-Pulsmodulation (BPM).
In Abb. 1.4.5 ist eine grafische Veranschaulichung des Amplituden-Pulsmodulationsalgorithmus (APM) dargestellt. Im oberen Teil der Abb. ist die zeitliche Abhängigkeit x(t) — des Signals am Eingang zum Impulsmodulator. Das Ausgangssignal des Impulsmodulators y(t) besteht aus einer Folge von Rechteckimpulsen, die mit konstantem Quantisierungsintervall Δt erzeugt werden (siehe unteren Teil der Abb.). Die Dauer der Impulse ist gleich und beträgt Δ. Die Amplitude des Impulses am Ausgang des Modulators ist proportional zum entsprechenden Wert des kontinuierlichen Signals x(t) am Eingang dieses Modulators.
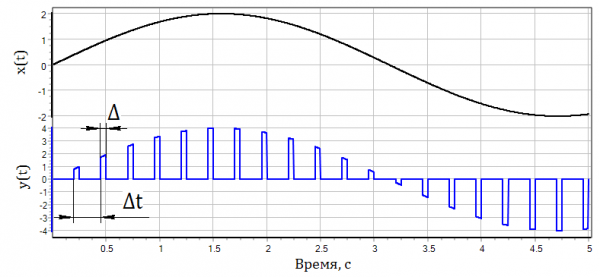
Abb. 1.4.5 — Umsetzung der Amplituden-Pulsmodulation
Dieses Verfahren der Pulsmodulation war in der elektronischen Messinstrumentierung von Steuerungs- und Schutzsystemen (SUS) für nukleare Energieanlagen (NEA) in den 70er und 80er Jahren des letzten Jahrhunderts weit verbreitet.
Abb. 1.4.6 zeigt eine grafische Darstellung des Verfahrens der Pulsweitenmodulation (PWM). Im oberen Teil von Abb. 1.14 ist die zeitliche Abhängigkeit x(t) – des Signals am Eingang des Impulselements. Das Ausgangssignal des Impulselements y(t) – ist eine Folge von Rechteckimpulsen, die mit einer konstanten Quantisierungsperiode erscheinen Δt (siehe unteren Teil von Abb. 1.14). Die Amplitude aller Impulse ist gleich. Die Dauer des Impulses Δt am Ausgang des Moduls ist proportional zur entsprechenden Größe des kontinuierlichen Signals x(t) am Eingang des Impulselements.
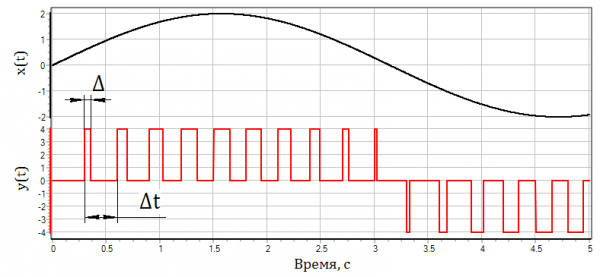
Abb. 1.4.6 – Umsetzung der Pulsweitenmodulation
Diese Methode der Impulsmodulation ist derzeit die am weitesten verbreitete in der elektronischen Messtechnik von Steuer- und Schutzsystemen (SUS) in Kernkraftwerken (KKW) und anderen technischen Systemen.
Zum Abschluss dieses Abschnitts ist darauf hinzuweisen, dass, wenn die charakteristischen Zeitkonstanten in anderen Elementen des Steuerungssystems (SAS) deutlich größer sind als Δt (um mehrere Zehnerpotenzen), dann kann das Impulssteuersystem als kontinuierliches automatisiertes Steuerungssystem angesehen werden (bei Verwendung von sowohl PWM als auch PWM).
1.4.3. Klassifizierung nach dem Steuerungscharakter
Die Systeme der automatischen Steuerung werden entsprechend ihren Steuerungsprozessen in folgende Typen eingeteilt:
- deterministische AS, bei denen dem Eingangssignal eindeutig ein Ausgangssignal (und umgekehrt) zugeordnet werden kann;
- stochastische AS (statistische, probabilistische), bei denen auf ein bestimmtes Eingangssignal die AS mit einem zufälligen (stochastischen) Ausgangssignal reagiert.
Das stochastische Ausgangssignal wird charakterisiert durch:
- Verteilungsfunktion;
- mathematische Erwartung (Mittelwert);
- Varianz (Standardabweichung).
Die Stochastizität des Steuerungsprozesses wird in der Regel in wesentlich nichtlinearen AS beobachtet sowohl aus der Sicht der statischen Eigenschaften als auch (noch mehr) hinsichtlich der Nichtlinearität der dynamischen Glieder in den Dynamikgleichungen.
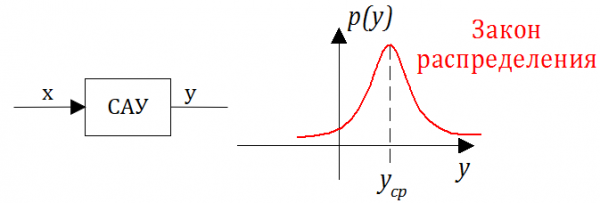
Abb. 1.4.7 — Verteilung der Ausgangsgröße der stochastischen AS
Neben den genannten grundlegenden Klassifikationen von Steuerungssystemen gibt es auch andere Klassifikationen. So kann die Klassifikation nach dem Steuerungsverfahren erfolgen und auf der Interaktion mit der Umwelt sowie der Anpassungsfähigkeit der Steuerungssysteme an Änderungen der Umgebungsparameter basieren. Die Systeme werden in zwei große Klassen unterteilt:
1) Gewöhnliche (nicht selbstoptimierende) Steuerungssysteme ohne Anpassung; diese Systeme gehören zu der Kategorie einfacher Systeme, die ihre Struktur im Steuerungsprozess nicht verändern. Sie sind am weitesten entwickelt und werden häufig eingesetzt. Gewöhnliche Steuerungssysteme werden in drei Unterklassen unterteilt: offene, geschlossene und hybride Steuerungssysteme.
2) Selbstoptimierende (adaptive) Steuerungssysteme. In diesen Systemen erfolgt bei Änderungen der äußeren Bedingungen oder der Eigenschaften des Regelobjekts eine automatische (nicht im Voraus festgelegte) Anpassung der Parameter des Steuergeräts durch Modifikation der Steuerungskoeffizienten, der Struktur des Systems oder sogar durch die Einführung neuer Elemente.
Ein weiteres Beispiel für eine Klassifikation: nach hierarchischen Merkmalen (einzelstufig, zweistufig, mehrstufig).
Nur registrierte Benutzer können an der Umfrage teilnehmen. Sind Sie an Contour interessiert?
Soll die Veröffentlichung der Vorlesungen zur UTS fortgesetzt werden?
88,7%Ja118
7,5%Nein10
3,8%Weiß ich nicht5
133 Benutzer haben abgestimmt. 10 Benutzer haben sich enthalten.
Quelle: habr.com
