

Hallo Habr. Wahrscheinlich hat jeder, der schon einmal Verwandte oder Freunde zum Flug verabschiedet hat, den kostenlosen Dienst Flightradar24 genutzt. Es ist eine sehr praktische Möglichkeit, den Standort eines Flugzeugs in Echtzeit zu verfolgen.
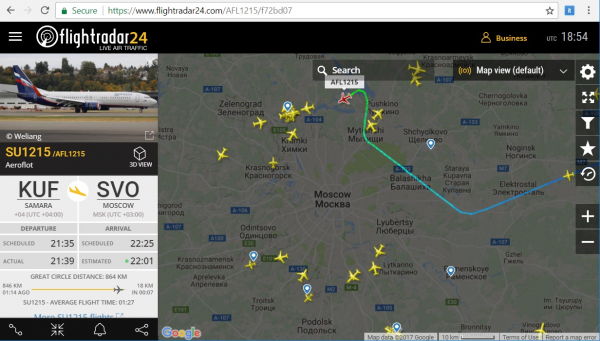
In Der Prinzip der Funktionsweise eines solchen Online-Dienstes wurde bereits beschrieben. Jetzt gehen wir einen Schritt weiter und klären, welche Daten zwischen dem Flugzeug und der Empfangsstation übertragen werden, und decodieren diese selbstständig mit Python.
Geschichte
Offensichtlich werden die Daten über die Flugzeuge nicht übermittelt, damit die Benutzer sie auf ihren Smartphones sehen können. Das System heißt ADS–B (Automatic dependent surveillance—broadcast) und dient der automatischen Übertragung von Informationen über das Flugzeug an die Leitstelle – übermittelt werden dessen Identifikationsnummer, Koordinaten, Richtung, Geschwindigkeit, Höhe und weitere Daten. Früher, bevor solche Systeme verfügbar waren, konnte der Fluglotse nur einen Punkt auf dem Radar sehen. Dies war nicht mehr ausreichend, als die Anzahl der Flugzeuge zu hoch wurde.
Technisch gesehen besteht ADS-B aus einem Transmitter am Flugzeug, der periodisch Pakete mit Informationen auf einer ausreichend hohen Frequenz von 1090 MHz sendet (es gibt auch andere Modi, die für uns jedoch weniger interessant sind, da die Koordinaten nur hier übermittelt werden). Natürlich gibt es neben dem Transmitter auch einen Empfänger irgendwo am Flughafen, aber für uns als Nutzer ist unser eigener Empfänger von Interesse.
Übrigens, zur Veranschaulichung: Das erste derartige System, Airnav Radarbox, das für normale Nutzer gedacht war, wurde 2007 eingeführt und kostete etwa 900 $. Die jährliche Abonnementgebühr für die NetzwerkkDienste betrug zusätzlich etwa 250 $.
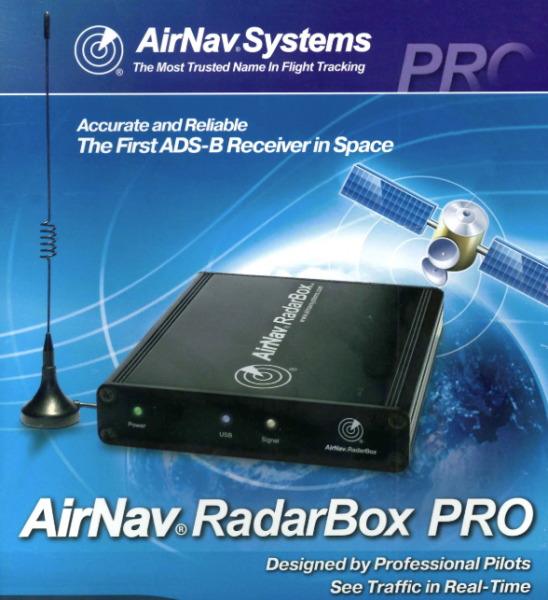
Die Bewertungen der ersten russischen Besitzer können im Forum gelesen werden . Heute, da RTL-SDR-Empfänger weit verbreitet sind, kann ein ähnliches Gerät für 30 $ zusammengestellt werden. Nähere Informationen dazu fanden Sie im . Kommen wir nun zum Protokoll — schauen wir uns an, wie es funktioniert.
Signalempfang
Zu Beginn muss das Signal aufgezeichnet werden. Das gesamte Signal hat eine Dauer von nur 120 Mikrosekunden, daher ist ein SDR-Empfänger mit einer Abtastrate von mindestens 5 MHz wünschenswert, um die Komponenten komfortabel zu analysieren.
Nach der Aufnahme erhalten wir eine WAV-Datei mit einer Abtastrate von 5.000.000 Samples/Sekunde; 30 Sekunden solcher Aufnahmen „wiegen“ etwa 500 MB. Es ist natürlich nutzlos, sie mit einem Media Player anzuhören – die Datei enthält keinen Ton, sondern direkt das digitalisierte Radiosignal – genau so funktioniert Software Defined Radio.
Wir werden die Datei mit Python öffnen und verarbeiten. Wer selbst experimentieren möchte, kann ein Beispiel der Aufnahme herunterladen. .
Laden wir die Datei hoch und schauen wir uns an, was darin steckt.
from scipy.io import wavfile
import matplotlib.pyplot as plt
import numpy as np
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
data = data.astype(float)
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
plt.plot(A)
plt.show()
Das Ergebnis: Wir sehen klare „Impulse“ vor dem Hintergrund von Rauschen.
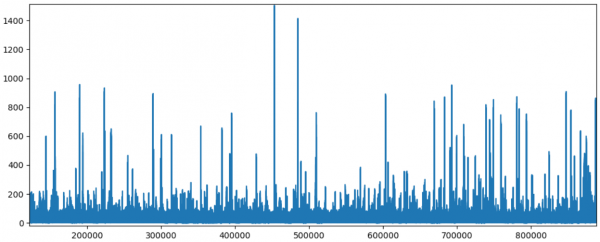
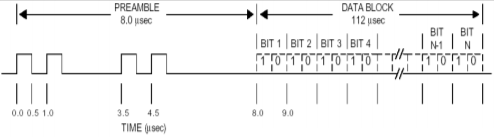
Jeder „Impuls“ ist das Signal selbst, dessen Struktur gut sichtbar ist, wenn man die Auflösung im Diagramm erhöht.
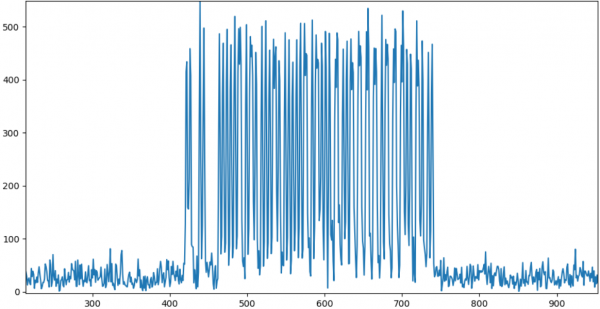
Wie zu sehen ist, entspricht das Bild durchaus dem, was oben beschrieben wurde. Wir können mit der Datenverarbeitung beginnen.
Dekodierung
Zunächst müssen wir den Bitstrom erhalten. Das Signal ist mit Manchester-Codierung kodiert:

Aus den Unterschiedsniveaus in Halbbytes lassen sich leicht die tatsächlichen „0“ und „1“ ableiten.
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 avg2:
bits_str += "1"
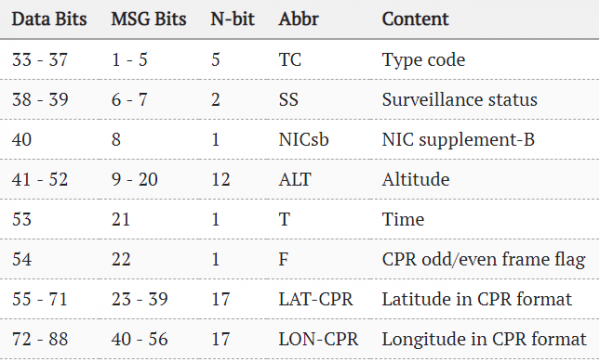
Die Struktur des Signals sieht wie folgt aus:

Betrachten wir die Felder genauer.
DF (Downlink-Format, 5 Bit) — definiert den Nachrichtentyp. Es gibt mehrere Typen:
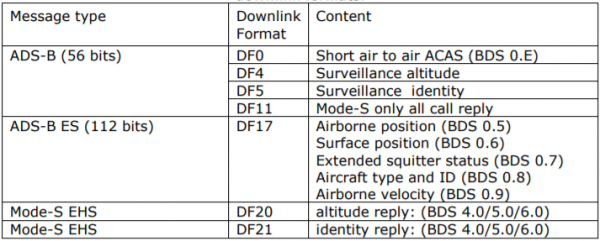
()
Uns interessiert nur der Typ DF17, da er die Koordinaten des Luftfahrzeugs enthält.
ICAO (24 Bit) — der internationale eindeutige Code des Luftfahrzeugs. Man kann das Flugzeug anhand seines Codes überprüfen (leider hat der Autor die Datenbank nicht mehr aktualisiert, sie ist jedoch noch relevant). Zum Beispiel haben wir für den Code 3c5ee2 die folgende Information:

Korrektur: im wurde die Beschreibung des ICAO-Codes ausführlicher dargelegt, Interessierte werden empfohlen, sich damit vertraut zu machen.
DATA (56 oder 112 Bit) — die eigentlichen Daten, die wir dekodieren werden. Die ersten 5 Bits der Daten sind das Feld Typcode, das den Untertyp der gespeicherten Daten enthält (nicht zu verwechseln mit DF). Es gibt ziemlich viele Typen:
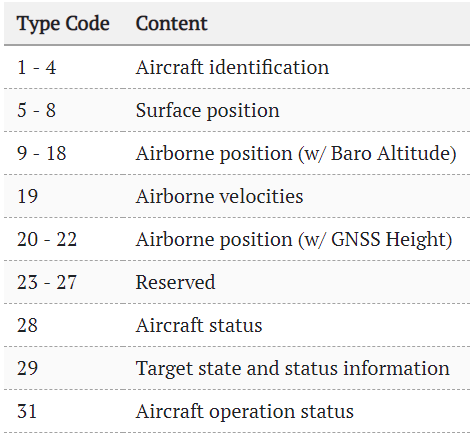
()
Lassen Sie uns einige Beispiele von Paketen untersuchen.
Identifikation des Luftfahrzeugs
Beispiel im Binärformat:
00100 011 000101 010111 000111 110111 110001 111000
Datenfelder:
+------+------+------+------+------+------+------+------+------+------+
| TC,5 | EC,3 | C1,6 | C2,6 | C3,6 | C4,6 | C5,6 | C6,6 | C7,6 | C8,6 |
+------+------+------+------+------+------+------+------+------+------+
TC = 00100b = 4, jedes Zeichen C1-C8 enthält Codes, die den Indizes in der Zeile entsprechen:
#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######
Durch das Dekodieren der Zeile erhält man leicht den Flugzeugcode: EWG7184
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Flugzeugidentifikation:", code_str.replace('#', ''))
Luftposition
Während der Name einfach ist, sind die Koordinaten komplizierter. Sie werden in Form von geraden und ungeraden Frames übermittelt. Der Feldcode TC = 01011b = 11.
Beispiel für gerade und ungerade Pakete:
01011 000 000101110110 00 10111000111001000 10000110101111001
01011 000 000110010000 01 10010011110000110 10000011110001000
Die Berechnung der Koordinaten erfolgt mit einer recht komplexen Formel:
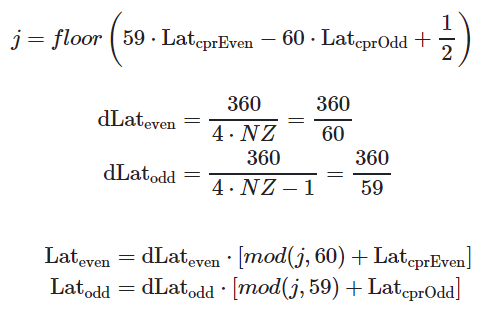
()
Ich bin kein GIS-Spezialist, daher weiß ich nicht, woher sie abgeleitet werden. Wer Bescheid weiß, kann gerne in den Kommentaren schreiben.
Die Höhe wird einfacher berechnet – abhängig von einem bestimmten Bit kann sie entweder als Vielfaches von 25 oder 100 Fuß dargestellt werden.
Luftgeschwindigkeit
Paket mit TC=19. Interessant ist, dass die Geschwindigkeit sowohl genau in Bezug auf den Boden (Ground Speed) als auch in der Luft, gemessen vom Sensor des Flugzeugs (Airspeed), angegeben werden kann. Außerdem werden viele verschiedene Felder übermittelt:
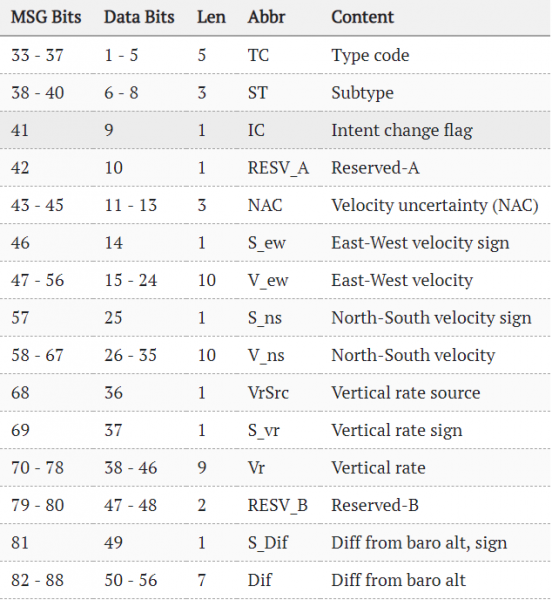
()
Fazit
Wie man sehen kann, hat die ADS-B-Technologie sich zu einer interessanten Symbiose entwickelt, bei der ein Standard sowohl für Fachleute als auch für gewöhnliche Nutzer von Nutzen ist. Natürlich spielte die Senkung der Kosten für digitale SDR-Empfänger eine entscheidende Rolle, die es ermöglichen, Signale mit Frequenzen über einem Gigahertz buchstäblich „für wenig Geld“ auf einem Gerät zu empfangen.
Im Standard selbst gibt es natürlich viel mehr. Interessierte können das PDF auf der Seite einsehen oder die bereits erwähnte .
Wahrscheinlich wird nicht jeder die oben genannten Informationen benötigen, aber die allgemeine Idee, wie es funktioniert, sollte zumindest geblieben sein, hoffe ich.
Übrigens gibt es bereits einen fertigen Decoder in Python, den man sich anschauen kann . Und Besitzer von SDR-Empfängern können einen fertigen ADS-B-Decoder zusammenstellen und in Betrieb nehmen , darüber wurde ausführlicher in .
Der Quellcode des Parsers, der im Artikel beschrieben wird, ist unter dem Beitrag zu finden. Es handelt sich um ein Testbeispiel, das keinen Anspruch auf Produktionsreife erhebt, aber einige Funktionen funktionieren, und man kann die oben aufgezeichnete Datei damit parsen.
Quellcode (Python)
from __future__ import print_function
from scipy.io import wavfile
from scipy import signal
import matplotlib.pyplot as plt
import numpy as np
import math
import sys
def parse_message(data, start, bit_len):
max_len = bit_len*128
A = data[start:start + max_len]
A = signal.resample(A, 10*max_len)
bits = np.zeros(10*max_len)
bit_len *= 10
start_data = bit_len*8
# Parse first 8 bits
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
df = int(bits_str[0:5], 2)
# Aircraft address (db - https://junzis.com/adb/?q=3b1c5c )
bits_str = ""
for p in range(8, 32):
pos = start_data + bit_len * p
p1, p2 = A[pos: pos + bit_len / 2], A[pos + bit_len / 2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
# print "Aircraft address:", bits_str, hex(int(bits_str, 2))
address = hex(int(bits_str, 2))
# Filter specific aircraft (optional)
# if address != "0x3c5ee2":
# return
if df == 16 or df == 17 or df == 18 or df == 19 or df == 20 or df == 21:
# print "Pos:", start, "DF:", msg_type
# Data (56bit)
bits_str = ""
for p in range(32, 88):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
# bits[pos + bit_len / 2] = 50
elif avg1 > avg2:
bits_str += "1"
# http://www.lll.lu/~edward/edward/adsb/DecodingADSBposition.html
# print "Data:"
# print bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17]
# Type Code:
tc, ec = int(bits_str[:5], 2), int(bits_str[5:8], 2)
# print("DF:", df, "TC:", tc)
# 1 - 4 Aircraft identification
# 5 - 8 Surface position
# 9 - 18 Airborne position (w/ Baro Altitude)
# 19 Airborne velocities
if tc >= 1 and tc <= 4: # and (df == 17 or df == 18):
print("Aircraft address:", address)
print("Data:")
print(bits_str[:8], bits_str[8:14], bits_str[14:20], bits_str[20:26], bits_str[26:32], bits_str[32:38], bits_str[38:44])
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Aircraft Identification:", code_str.replace('#', ''))
print()
if tc == 11:
print("Aircraft address:", address)
print("Data: (11)")
print(bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17])
# Bit 22 contains the F flag which indicates which CPR format is used (odd or even)
# First frame has F flag = 0 so is even and the second frame has F flag = 1 so odd
# f = bits_str[21:22]
# print("F:", int(f, 2))
# Altitude
alt1b = bits_str[8:20]
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
# lat_dec = int(bits_str[22:22+17], 2)
# lon_dec = int(bits_str[39:39+17], 2)
# print("Lat/Lon:", lat_dec, lon_dec)
# http://airmetar.main.jp/radio/ADS-B%20Decoding%20Guide.pdf
print()
if tc == 19:
print("Aircraft address:", address)
print("Data:")
# print(bits_str)
print(bits_str[:5], bits_str[5:8], bits_str[8:10], bits_str[10:13], bits_str[13] ,bits_str[14:24], bits_str[24], bits_str[25:35], bits_str[35:36], bits_str[36:65])
subtype = int(bits_str[5:8], 2)
# https://mode-s.org/decode/adsb/airborne-velocity.html
spd, hdg, rocd = -1, -1, -1
if subtype == 1 or subtype == 2:
print("Velocity Subtype 1: Ground speed")
v_ew_sign = int(bits_str[13], 2)
v_ew = int(bits_str[14:24], 2) - 1 # east-west velocity
v_ns_sign = int(bits_str[24], 2)
v_ns = int(bits_str[25:35], 2) - 1 # north-south velocity
v_we = -1*v_ew if v_ew_sign else v_ew
v_sn = -1*v_ns if v_ns_sign else v_ns
spd = math.sqrt(v_sn*v_sn + v_we*v_we) # unit in kts
hdg = math.atan2(v_we, v_sn)
hdg = math.degrees(hdg) # convert to degrees
hdg = hdg if hdg >= 0 else hdg + 360 # no negative val
if subtype == 3:
print("Subtype Subtype 3: Airspeed")
hdg = int(bits_str[14:24], 2)/1024.0*360.0
spd = int(bits_str[25:35], 2)
vr_sign = int(bits_str[36], 2)
vr = int(bits_str[36:45], 2)
rocd = -1*vr if vr_sign else vr # rate of climb/descend
print("Speed (kts):", spd, "Rate:", rocd, "Heading:", hdg)
print()
# print()
def calc_coordinates():
def _cprN(lat, is_odd):
nl = _cprNL(lat) - is_odd
return nl if nl > 1 else 1
def _cprNL(lat):
try:
nz = 15
a = 1 - math.cos(math.pi / (2 * nz))
b = math.cos(math.pi / 180.0 * abs(lat)) ** 2
nl = 2 * math.pi / (math.acos(1 - a/b))
return int(math.floor(nl))
except:
# happens when latitude is +/-90 degree
return 1
def floor_(x):
return int(math.floor(x))
lat1b, lon1b, alt1b = "10111000111010011", "10000110111111000", "000101111001"
lat2b, lon2b, alt2b = "10010011101011100", "10000011000011011", "000101110111"
lat1, lon1, alt1 = int(lat1b, 2), int(lon1b, 2), int(alt1b, 2)
lat2, lon2, alt2 = int(lat2b, 2), int(lon2b, 2), int(alt2b, 2)
# 131072 is 2^17, since CPR lat and lon are 17 bits each
cprlat_even, cprlon_even = lat1/131072.0, lon1/131072.0
cprlat_odd, cprlon_odd = lat2/131072.0, lon2/131072.0
print(cprlat_even, cprlon_even)
j = floor_(59*cprlat_even - 60*cprlat_odd)
print(j)
air_d_lat_even = 360.0 / 60
air_d_lat_odd = 360.0 / 59
# Lat
lat_even = float(air_d_lat_even * (j % 60 + cprlat_even))
lat_odd = float(air_d_lat_odd * (j % 59 + cprlat_odd))
if lat_even >= 270:
lat_even = lat_even - 360
if lat_odd >= 270:
lat_odd = lat_odd - 360
# Lon
ni = _cprN(lat_even, 0)
m = floor_(cprlon_even * (_cprNL(lat_even)-1) - cprlon_odd * _cprNL(lat_even) + 0.5)
lon = (360.0 / ni) * (m % ni + cprlon_even)
print("Lat", lat_even, "Lon", lon)
# Altitude
# Q-bit (bit 48) indicates whether the altitude is encoded in multiples of 25 or 100 ft (0: 100 ft, 1: 25 ft)
# The value can represent altitudes from -1000 to +50175 ft.
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
T = 1/fs
print("Sample rate %f MS/s" % (fs / 1e6))
print("Cnt samples %d" % len(data))
print("Duration: %f s" % (T * len(data)))
data = data.astype(float)
cnt = data.shape[0]
# Processing only part on file (faster):
# cnt = 10000000
# data = data[:cnt]
print("Processing I/Q...")
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
bits = np.zeros(cnt)
# To see scope without any processing, uncomment
# plt.plot(A)
# plt.show()
# sys.exit(0)
print("Extracting signals...")
pos = 0
avg = 200
msg_start = 0
# Find beginning of each signal
while pos < cnt - 16*1024:
# P1 - message start
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg and pos - msg_start > 1000:
msg_start = pos
bits[pos] = 100
pos += 4
break
pos += 1
start1, start2, start3, start4 = msg_start, 0, 0, 0
# P2
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start2 = pos
bits[pos] = 90
pos += 1
break
pos += 1
# P3
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start3 = pos
bits[pos] = 80
pos += 1
break
pos += 1
# P4
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start4 = pos
bits[pos] = 70
pos += 1
break
pos += 1
sig_diff = start4 - start1
if 20 < sig_diff < 25:
bits[msg_start] = 500
bit_len = int((start4 - start1) / 4.5)
# print(pos, start1, start4, ' - ', bit_len)
# start = start1 + 8*bit_len
parse_message(A, msg_start, bit_len)
pos += 450
# For debugging: check signal start
# plt.plot(A)
# plt.plot(bits)
# plt.show()
Ich hoffe, es war für jemanden interessant, danke für die Aufmerksamkeit.
Quelle: habr.com
