

Angesichts der aktuellen Vielfalt in der Ausbildungsrobotik freut man sich, dass den Kindern eine Vielzahl von Baukästen und fertigen Produkten zur Verfügung steht und dass die Einstiegshürde für die Grundlagen des Programmierens auf ein recht niedriges Niveau gesenkt wurde (sogar bis in den Kindergarten). Es gibt einen klaren Trend, zunächst das modulare Blockprogrammieren zu erlernen und dann auf fortgeschrittenere Programmiersprachen umzusteigen. Doch eine solche Situation war nicht immer gegeben.
In den Jahren 2009-2010 begann Russland, sich intensiv mit Arduino und Scratch vertraut zu machen. Verfügbare Elektronik und Programmierung begannen die Köpfe von Enthusiasten und Lehrern zu erobern, und die Idee, all das zu verbinden, war bereits weit verbreitet (und teilweise in der Welt des Infospaces umgesetzt).
Tatsächlich hatte Scratch in der zu dieser Zeit veröffentlichten Version 1.4 bereits Unterstützung für externe Hardware. Es war die Unterstützung für Lego WeDo (Motorenblöcke) integriert, und .
Es gab den Wunsch nach Arduino und darauf basierenden Robotern, vorzugsweise in der Basisversion. Zur selben Zeit hatte ein japanischer Arduino-Entwickler eine Möglichkeit gefunden, die Plattformen zu kombinieren und veröffentlichte die Schaltpläne (wenn auch nicht vollständig, sodass man improvisieren musste) sowie die Firmware zur allgemeinen Verfügung (leider nicht einmal in Englisch). Auf Basis dieses Projekts wurde 2010 ScratchDuino ins Leben gerufen (zu jener Zeit arbeitete ich zusammen mit meiner Frau bei LinuxCenter).
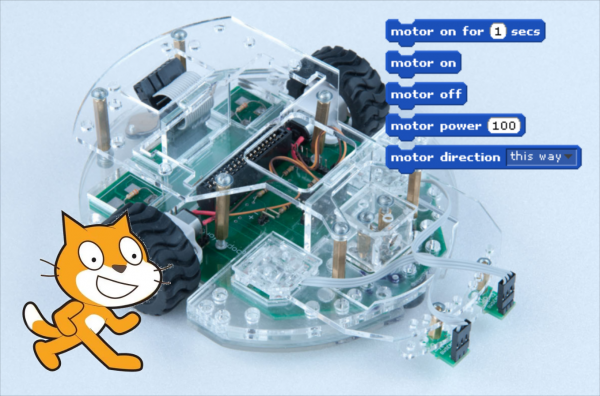
Das Konzept des „wechselbaren Moduls“ (kommt Ihnen das nicht bekannt vor wie Micro:bit?), magnetische Halterungen für die Roboterelemente und die Nutzung der eingebauten Funktionen von Scratch zur Verarbeitung von Sensoren und zur Motorsteuerung.
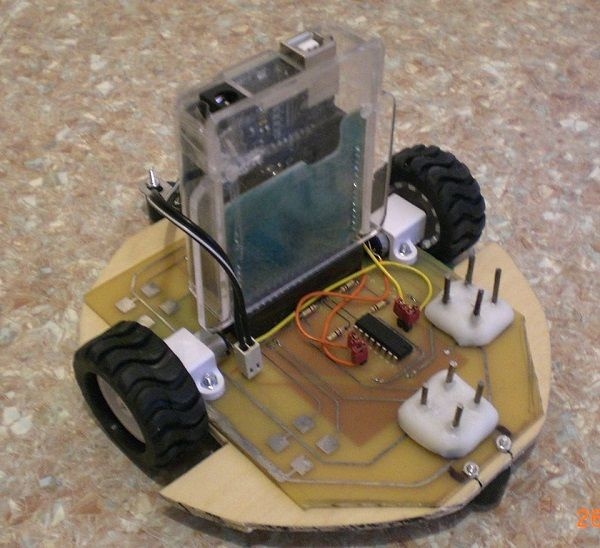
Der Roboter war ursprünglich als Lego-kompatibel gedacht:

Im Jahr 2011 wurde die Plattform ins Leben gerufen und (nachdem meine Frau und ich 2013 aus dem Projekt ausschieden) lebt sie bis heute unter dem Namen ROBBO weiter und entwickelt sich.

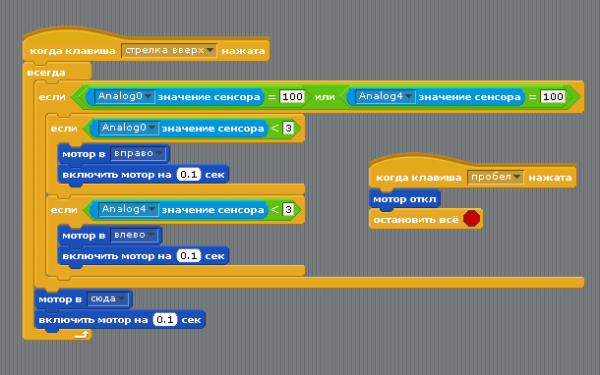
Manche könnten einwenden, dass es ähnliche Projekte gegeben hat. Ja, zur gleichen Zeit wurde das Projekt S4A entwickelt, das sich jedoch auf die Programmierung im Arduino-Stil (mit seinen digitalen und analogen Ausgängen) aus einer modifizierten Version von Scratch konzentrierte, während meine Entwicklung mit der "Vanilla"-Version (obwohl wir sie auch angepasst haben, um die Blöcke speziell für Sensoren von 1 bis 4 anzuzeigen) arbeiten konnte.
Dann kam Scratch 2.0, und damit begannen Plugins sowohl für Arduino als auch für beliebte Roboter zu erscheinen, während Scratch 3.0 bereits im Auslieferungszustand viele Roboterplattformen unterstützt.
Blockly. Wenn man sich beliebte Roboter wie den MBot ansieht (der übrigens anfangs ebenfalls eine modifizierte Version von Scratch verwendete), werden sie in einer blockbasierten Programmiersprache programmiert, die jedoch nicht Scratch ist, sondern ein modifiziertes Blockly von Google. Ich weiß nicht, ob meine Entwicklung Einfluss auf dessen Entwicklung hatte, aber ich kann sicher sagen, dass als wir 2013 in London den Entwicklern die Scratchduino-Plattform präsentierten, Roboter dort noch "nicht in Aussicht" waren.

Heute sind Blockly-Modifikationen die Grundlage vieler Roboterbausätze und Lernroboter. Das ist eine andere Geschichte, denn in letzter Zeit gab es (und auch viele sind wieder verschwunden) eine große Anzahl an Projekten, sowohl in Russland als auch weltweit. In Russland waren wir jedoch beim Scratch-Umsetzung und im "Wettbewerb" mit Lego die Ersten 🙂
Was ist nach 2013 passiert? Meine Frau und ich haben 2014 unser Projekt ПРОСТОРОБОТ (auch bekannt als SIMPLEROBOT) gegründet und uns der Entwicklung von Brettspielen gewidmet. Aber Scratch hat uns nicht losgelassen.
Wir haben interessante Entwicklungen zur Robotermodellierung in Scratch und seinem Nachfolger Snap! gemacht.
Die PDF-Datei mit der Beschreibung kann heruntergeladen und frei verwendet werden. , und fertige Projekte. . Alles funktioniert auch in der 3. Version von Scratch.
Zudem haben wir zum Programmieren von Robotern in Scratch in unserem neuen Brettspiel "Golem Battle. Kartenliga der Parobots" zurückgefunden und würden uns freuen, wenn .

Wenn man am Ursprung von etwas steht und die Trends fühlt, bevor sie massenhaft auftauchen, ist es erfreulich, dass man der Erste war und im Grunde einen Markt geschaffen hat. Aber es ist auch traurig, dass nicht man selbst die Lorbeeren des Sieges einheimsen kann. Ich kann jedoch stolz sagen, dass die Verbindung von Scratch und Arduino in der Robotik in Russland auch Dank meiner Bemühungen entstanden ist.
Quelle: habr.com
