

Δημοσιεύω το πρώτο κεφάλαιο διαλέξεων για τη θεωρία του αυτόματου ελέγχου, μετά τις οποίες η ζωή σας δεν θα είναι ποτέ ξανά η ίδια.
Οι διαλέξεις στο μάθημα «Διαχείριση Τεχνικών Συστημάτων» δίνονται από τον Oleg Stepanovich Kozlov στο Τμήμα «Πυρηνικών Αντιδραστήρων και Σταθμών Παραγωγής Ηλεκτρικής Ενέργειας», Σχολή «Ενεργειακής Μηχανικής» του Κρατικού Τεχνικού Πανεπιστημίου Bauman της Μόσχας. Για τις οποίες του αξίζει μεγάλη ευγνωμοσύνη.
Αυτές οι διαλέξεις μόλις προετοιμάζονται για δημοσίευση σε μορφή βιβλίου, και δεδομένου ότι υπάρχουν ειδικοί του TAU, φοιτητές και όσοι απλώς ενδιαφέρονται για το θέμα εδώ, οποιαδήποτε κριτική είναι ευπρόσδεκτη.

1. Βασικές έννοιες της θεωρίας ελέγχου τεχνικών συστημάτων
1.1. Στόχοι, αρχές διαχείρισης, είδη συστημάτων διαχείρισης, βασικοί ορισμοί, παραδείγματα
Η ανάπτυξη και βελτίωση της βιομηχανικής παραγωγής (ενέργεια, μεταφορές, μηχανολογία, διαστημική τεχνολογία κ.λπ.) απαιτεί συνεχή αύξηση της παραγωγικότητας των μηχανημάτων και των μονάδων, βελτίωση της ποιότητας των προϊόντων, μείωση του κόστους και, ιδιαίτερα στην πυρηνική ενέργεια, απότομη αύξηση της ασφάλειας (πυρηνική, ακτινοβολία κ.λπ.) της λειτουργίας των πυρηνικών σταθμών ηλεκτροπαραγωγής και των πυρηνικών εγκαταστάσεων.
Η υλοποίηση των καθορισμένων στόχων είναι αδύνατη χωρίς την εισαγωγή σύγχρονων συστημάτων ελέγχου, συμπεριλαμβανομένων τόσο των αυτοματοποιημένων (με τη συμμετοχή ανθρώπινου χειριστή) όσο και των αυτόματων (χωρίς τη συμμετοχή ανθρώπινου χειριστή) συστημάτων ελέγχου (CS).
Ορισμός: Η διαχείριση είναι η οργάνωση μιας συγκεκριμένης τεχνολογικής διαδικασίας που διασφαλίζει την επίτευξη του καθορισμένου στόχου.
Θεωρία Διοίκησης είναι ένας τομέας της σύγχρονης επιστήμης και τεχνολογίας. Βασίζεται τόσο σε θεμελιώδεις (γενικούς επιστημονικούς) κλάδους (για παράδειγμα, μαθηματικά, φυσική, χημεία κ.λπ.) όσο και σε εφαρμοσμένους κλάδους (ηλεκτρονική, τεχνολογία μικροεπεξεργαστών, προγραμματισμός κ.λπ.).
Οποιαδήποτε διαδικασία ελέγχου (αυτόματη) αποτελείται από τα ακόλουθα κύρια στάδια (στοιχεία):
- λήψη πληροφοριών σχετικά με την εργασία ελέγχου·
- λήψη πληροφοριών σχετικά με το αποτέλεσμα του ελέγχου·
- ανάλυση των πληροφοριών που ελήφθησαν·
- εφαρμογή της απόφασης (επίδραση στο αντικείμενο ελέγχου).
Για την εφαρμογή της Διαδικασίας Διαχείρισης, το Σύστημα Διαχείρισης (ΣΔ) πρέπει να διαθέτει:
- πηγές πληροφοριών σχετικά με την εργασία ελέγχου·
- πηγές πληροφοριών σχετικά με τα αποτελέσματα ελέγχου (διάφοροι αισθητήρες, συσκευές μέτρησης, ανιχνευτές κ.λπ.)·
- συσκευές για την ανάλυση των ληφθέντων πληροφοριών και την ανάπτυξη λύσεων·
- ενεργοποιητές που επενεργούν στο αντικείμενο ελέγχου, οι οποίοι περιέχουν: ρυθμιστή, κινητήρες, ενισχυτές και μετατροπείς κ.λπ.
Ορισμός: Εάν το σύστημα ελέγχου (CS) περιέχει όλα τα μέρη που αναφέρονται παραπάνω, τότε είναι κλειστό.
Ορισμός: Ο έλεγχος ενός τεχνικού αντικειμένου χρησιμοποιώντας πληροφορίες σχετικά με τα αποτελέσματα του ελέγχου ονομάζεται αρχή της ανάδρασης.
Σχηματικά, ένα τέτοιο σύστημα ελέγχου μπορεί να αναπαρασταθεί ως εξής:
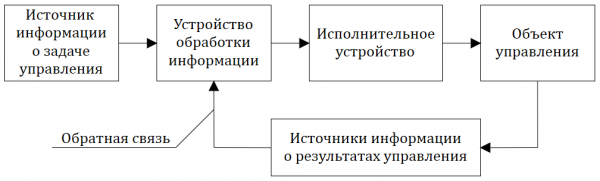
Σχήμα 1.1.1 — Δομή του συστήματος ελέγχου (CS)
Εάν το σύστημα ελέγχου (ΣΕ) έχει ένα δομικό διάγραμμα, η εμφάνιση του οποίου αντιστοιχεί στο Σχ. 1.1.1, και λειτουργεί (εργάζεται) χωρίς ανθρώπινη συμμετοχή (χειριστής), τότε ονομάζεται αυτόματο σύστημα ελέγχου (ACS).
Εάν το σύστημα ελέγχου λειτουργεί με τη συμμετοχή ενός ατόμου (χειριστή), τότε ονομάζεται αυτοματοποιημένο σύστημα ελέγχου.
Εάν ο Έλεγχος παρέχει έναν δεδομένο νόμο μεταβολής του αντικειμένου στο χρόνο ανεξάρτητα από τα αποτελέσματα του ελέγχου, τότε ο έλεγχος αυτός εκτελείται σύμφωνα με έναν ανοιχτό βρόχο και ο ίδιος ο έλεγχος ονομάζεται ελεγχόμενο πρόγραμμα.
Τα συστήματα που λειτουργούν σε ανοιχτό βρόχο περιλαμβάνουν βιομηχανικά μηχανήματα (γραμμές μεταφοράς, περιστροφικές γραμμές κ.λπ.), εργαλειομηχανές με αριθμητικό έλεγχο (CNC): βλέπε παράδειγμα στο Σχήμα 1.1.2.
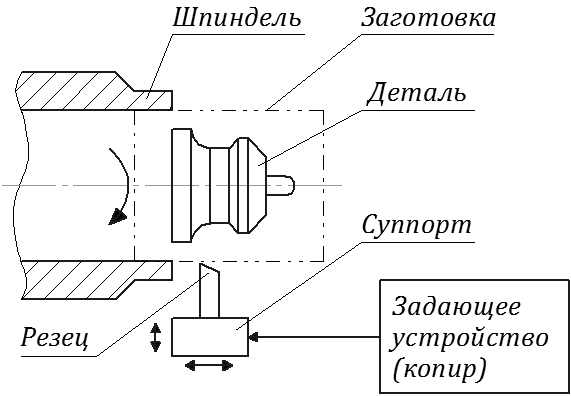
Σχήμα 1.1.2 — Παράδειγμα ελέγχου λογισμικού
Η συσκευή ρύθμισης μπορεί να είναι, για παράδειγμα, ένα «φωτοτυπικό».
Δεδομένου ότι σε αυτό το παράδειγμα δεν υπάρχουν αισθητήρες (συσκευές μέτρησης) που να παρακολουθούν το κατασκευασμένο εξάρτημα, τότε εάν, για παράδειγμα, ο κόφτης εγκαταστάθηκε λανθασμένα ή χάλασε, τότε ο καθορισμένος στόχος (κατασκευή του εξαρτήματος) δεν μπορεί να επιτευχθεί (πραγματοποιηθεί). Συνήθως σε συστήματα αυτού του τύπου, είναι απαραίτητος ο έλεγχος εξόδου, ο οποίος θα καταγράφει μόνο την απόκλιση των διαστάσεων και του σχήματος του εξαρτήματος από το επιθυμητό.
Τα συστήματα αυτόματου ελέγχου χωρίζονται σε 3 τύπους:
- συστήματα αυτόματου ελέγχου (ACS)·
- συστήματα αυτόματου ελέγχου (ACS)·
- συστήματα παρακολούθησης (SS).
Τα SAR και SS είναι υποσύνολα του SAU ==>  .
.
Ορισμός: Ένα σύστημα αυτόματου ελέγχου που διασφαλίζει τη σταθερότητα οποιασδήποτε φυσικής ποσότητας (ομάδας μεγεθών) στο αντικείμενο ελέγχου ονομάζεται σύστημα αυτόματου ελέγχου (ΣΕΠ).
Τα συστήματα αυτόματου ελέγχου (ACS) είναι ο πιο συνηθισμένος τύπος συστημάτων αυτόματου ελέγχου.
Ο πρώτος αυτόματος ρυθμιστής στον κόσμο (18ος αιώνας) είναι ο ρυθμιστής Watt. Αυτό το σχήμα (βλ. Σχήμα 1.1.3) εφαρμόστηκε από τον Watt στην Αγγλία για να διατηρήσει μια σταθερή ταχύτητα περιστροφής του τροχού της ατμομηχανής και, κατά συνέπεια, για να διατηρήσει μια σταθερή ταχύτητα περιστροφής (κίνησης) της τροχαλίας μετάδοσης (ιμάντα).
Σε αυτό το διάγραμμα ευαίσθητα στοιχεία (αισθητήρες μέτρησης) είναι τα "βάρη" (σφαίρες). Τα "βάρη" (σφαίρες) "αναγκάζουν" επίσης τον βραχίονα ζυγοστάθμισης και στη συνέχεια τη βαλβίδα να κινηθούν. Επομένως, αυτό το σύστημα μπορεί να ταξινομηθεί ως σύστημα άμεσου ελέγχου και ο ρυθμιστής - ως ρυθμιστής άμεσης δράσης, καθώς εκτελεί ταυτόχρονα τις λειτουργίες τόσο του «μετρητή» όσο και του «ρυθμιστή».
Σε ρυθμιστικές αρχές άμεσης δράσης πρόσθετη πηγή Δεν απαιτείται ενέργεια για την κίνηση του στοιχείου ελέγχου.
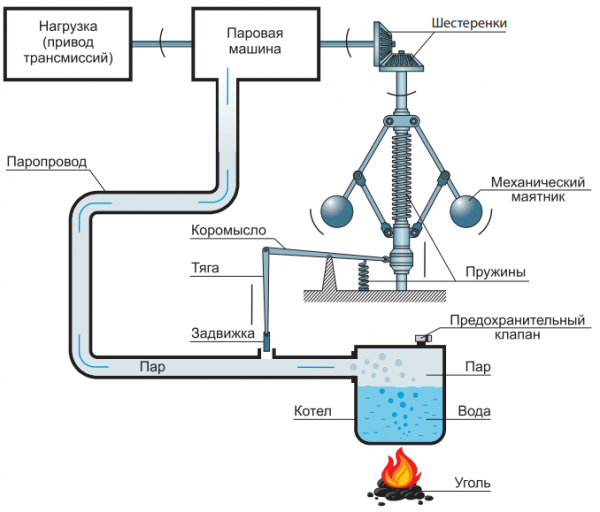
Σχήμα 1.1.3 — Διάγραμμα αυτόματου ρυθμιστή Watt
Τα συστήματα έμμεσου ελέγχου απαιτούν την παρουσία ενός ενισχυτή (για παράδειγμα, ισχύος), ενός πρόσθετου ενεργοποιητή που περιέχει, για παράδειγμα, έναν ηλεκτροκινητήρα, έναν σερβοκινητήρα, μια υδραυλική κίνηση κ.λπ.
Ένα παράδειγμα ενός ACS (σύστημα αυτόματου ελέγχου), με την πλήρη έννοια αυτού του ορισμού, μπορεί να είναι ένα σύστημα ελέγχου που διασφαλίζει την εκτόξευση ενός πυραύλου σε τροχιά, όπου η ελεγχόμενη μεταβλητή μπορεί να είναι, για παράδειγμα, η γωνία μεταξύ του άξονα του πυραύλου και της κάθετου προς τη Γη ==> βλέπε Σχήμα 1.1.4.α και Σχήμα 1.1.4.β
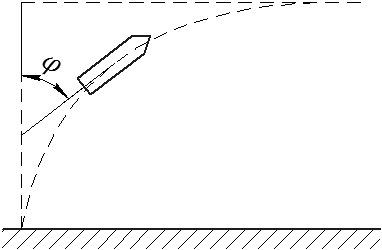
Σχήμα 1.1.4 (α)
Σχήμα 1.1.4 (β)
1.2. Δομή συστημάτων ελέγχου: απλά και πολυδιάστατα συστήματα
Στη θεωρία της Διαχείρισης Τεχνικών Συστημάτων, κάθε σύστημα συνήθως διαιρείται σε ένα σύνολο συνδέσμων που συνδέονται σε δομές δικτύου. Στην απλούστερη περίπτωση, το σύστημα περιέχει έναν σύνδεσμο, στην είσοδο του οποίου εφαρμόζεται μια ενέργεια εισόδου (είσοδος) και στην είσοδο λαμβάνεται μια απόκριση του συστήματος (έξοδος).
Στη θεωρία της Διαχείρισης Τεχνικών Συστημάτων, χρησιμοποιούνται δύο κύριες μέθοδοι αναπαράστασης συνδέσμων συστημάτων ελέγχου:
— στις μεταβλητές «εισόδου-εξόδου»·
— σε μεταβλητές κατάστασης (για περισσότερες λεπτομέρειες, βλ. ενότητες 6…7).
Η αναπαράσταση σε μεταβλητές εισόδου-εξόδου χρησιμοποιείται συνήθως για την περιγραφή σχετικά απλών συστημάτων που έχουν μία «είσοδο» (μία ενέργεια ελέγχου) και μία «έξοδο» (μία ελεγχόμενη μεταβλητή, βλ. Σχήμα 1.2.1).
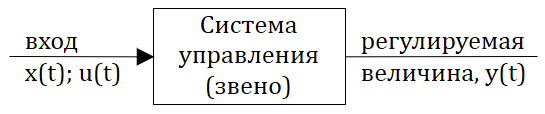
Σχήμα 1.2.1 – Σχηματική αναπαράσταση ενός απλού συστήματος ελέγχου
Συνήθως, μια τέτοια περιγραφή χρησιμοποιείται για τεχνικά απλά συστήματα αυτόματου ελέγχου (ACS).
Πρόσφατα, η αναπαράσταση σε μεταβλητές κατάστασης έχει γίνει ευρέως διαδεδομένη, ειδικά για τεχνικά πολύπλοκα συστήματα, συμπεριλαμβανομένων των πολυδιάστατων ACS. Το Σχήμα 1.2.2 δείχνει μια σχηματική αναπαράσταση ενός πολυδιάστατου συστήματος αυτόματου ελέγχου, όπου u1(t)…um(t) — ενέργειες ελέγχου (διάνυσμα ελέγχου), y1(t)…yp(t) — ρυθμιζόμενες παράμετροι του συστήματος ελέγχου (διάνυσμα εξόδου).
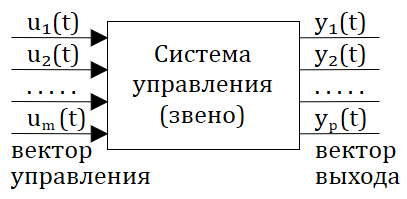
Σχήμα 1.2.2 - Σχηματική αναπαράσταση ενός πολυδιάστατου συστήματος ελέγχου
Ας εξετάσουμε λεπτομερέστερα τη δομή του ACS, που παρουσιάζεται στις μεταβλητές "είσοδος-έξοδος" και έχει μία είσοδο (είσοδος ή ρύθμιση ή ενέργεια ελέγχου) και μία έξοδο (ενέργεια εξόδου ή ελεγχόμενη (ή ρυθμιζόμενη) μεταβλητή).
Ας υποθέσουμε ότι το δομικό διάγραμμα ενός τέτοιου ACS αποτελείται από έναν ορισμένο αριθμό στοιχείων (συνδέσμων). Ομαδοποιώντας τους συνδέσμους σύμφωνα με τη λειτουργική αρχή (τι κάνουν οι σύνδεσμοι), το δομικό διάγραμμα του ACS μπορεί να μειωθεί στην ακόλουθη τυπική μορφή:
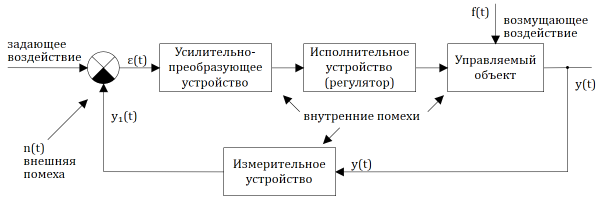
Σχήμα 1.2.3 — Δομικό διάγραμμα του συστήματος αυτόματου ελέγχου
Σύμβολο ε(t) ή μεταβλητή ε(t) υποδηλώνει μια ασυμφωνία (σφάλμα) στην έξοδο μιας συσκευής σύγκρισης, η οποία μπορεί να "λειτουργήσει" τόσο σε απλές συγκριτικές αριθμητικές πράξεις (συνήθως αφαίρεση, λιγότερο συχνά πρόσθεση) όσο και σε πιο σύνθετες συγκριτικές πράξεις (διαδικασίες).
Ως y1(t) = y(t)*k1Όπου k1 — συντελεστής κέρδους, τότε ==>
ε(t) = x(t) - y1(t) = x(t) - k1*y(t)
Το έργο του συστήματος ελέγχου είναι (εάν είναι σταθερό) να «εργάζεται» για την εξάλειψη της αναντιστοιχίας (σφάλματος) ε(t), δηλαδή ==> ε(t) → 0.
Πρέπει να σημειωθεί ότι το σύστημα ελέγχου επηρεάζεται τόσο από εξωτερικές επιρροές (έλεγχο, διαταραχή, παρεμβολές) όσο και από εσωτερικές παρεμβολές. Η παρεμβολή διαφέρει από την επιρροή από τη στοχαστική φύση (τυχαιότητα) της ύπαρξής της, ενώ η επιρροή είναι σχεδόν πάντα ντετερμινιστική.
Για να ορίσουμε τον έλεγχο (ενέργεια ρύθμισης) θα χρησιμοποιήσουμε είτε x (τ)Ή u(t).
1.3. Βασικοί νόμοι ελέγχου
Αν επιστρέψουμε στο τελευταίο σχήμα (το δομικό διάγραμμα του ACS στο Σχήμα 1.2.3), τότε είναι απαραίτητο να «αποκρυπτογραφήσουμε» τον ρόλο που παίζει η συσκευή ενίσχυσης και μετατροπής (ποιες λειτουργίες εκτελεί).
Εάν η συσκευή ενισχυτή-μετατροπέα (UCD) εκτελεί μόνο ενίσχυση (ή εξασθένηση) του σήματος σφάλματος ε(t), δηλαδή:  Όπου
Όπου  – συντελεστής αναλογικότητας (σε μια συγκεκριμένη περίπτωση
– συντελεστής αναλογικότητας (σε μια συγκεκριμένη περίπτωση  = Σταθερότητα), τότε μια τέτοια λειτουργία ελέγχου κλειστού βρόχου ονομάζεται λειτουργία αναλογικός έλεγχος (P-έλεγχος).
= Σταθερότητα), τότε μια τέτοια λειτουργία ελέγχου κλειστού βρόχου ονομάζεται λειτουργία αναλογικός έλεγχος (P-έλεγχος).
Εάν η μονάδα ελέγχου παράγει ένα σήμα εξόδου ε1(t) ανάλογο με το σφάλμα ε(t) και το ολοκλήρωμα του ε(t), δηλ.  , τότε αυτή η λειτουργία ελέγχου ονομάζεται αναλογικά ενσωματώνοντας (Έλεγχος PI). ==>
, τότε αυτή η λειτουργία ελέγχου ονομάζεται αναλογικά ενσωματώνοντας (Έλεγχος PI). ==>  Όπου b – συντελεστής αναλογικότητας (σε μια συγκεκριμένη περίπτωση β = Σταθερό).
Όπου b – συντελεστής αναλογικότητας (σε μια συγκεκριμένη περίπτωση β = Σταθερό).
Συνήθως, ο έλεγχος PI χρησιμοποιείται για τη βελτίωση της ακρίβειας ελέγχου (ρύθμισης).
Εάν η UPU παράγει ένα σήμα εξόδου ε1(t) ανάλογο με το σφάλμα ε(t) και την παράγωγό του, τότε μια τέτοια λειτουργία ονομάζεται αναλογική-διαφορική (Έλεγχος PD): ==> 
Συνήθως, η χρήση του ελέγχου PD αυξάνει την ταχύτητα του ACS
Εάν η UPU παράγει ένα σήμα εξόδου ε1(t) ανάλογο με το σφάλμα ε(t), την παράγωγό του και το ολοκλήρωμα του σφάλματος ==>  , τότε μια τέτοια λειτουργία ονομάζεται τότε μια τέτοια λειτουργία ελέγχου ονομάζεται λειτουργία ελέγχου αναλογικού-ολοκληρώματος-διαφορικού (Έλεγχος PID).
, τότε μια τέτοια λειτουργία ονομάζεται τότε μια τέτοια λειτουργία ελέγχου ονομάζεται λειτουργία ελέγχου αναλογικού-ολοκληρώματος-διαφορικού (Έλεγχος PID).
Ο έλεγχος PID συχνά επιτρέπει «καλή» ακρίβεια ελέγχου με «καλή» ταχύτητα απόκρισης
1.4. Ταξινόμηση συστημάτων αυτόματου ελέγχου
1.4.1. Ταξινόμηση ανά τύπο μαθηματικής περιγραφής
Σύμφωνα με τον τύπο της μαθηματικής περιγραφής (δυναμικές και στατικές εξισώσεις), τα συστήματα αυτόματου ελέγχου (ACS) χωρίζονται σε γραμμικός и μη γραμμικό συστήματα (ACS ή SAR).
Κάθε «υποκλάση» (γραμμική και μη γραμμική) υποδιαιρείται σε έναν αριθμό «υποκλάσεων». Για παράδειγμα, οι γραμμικές ACS (SAR) διαφέρουν ως προς τον τύπο της μαθηματικής περιγραφής.
Δεδομένου ότι αυτό το εξάμηνο θα εξετάσει τις δυναμικές ιδιότητες μόνο γραμμικών συστημάτων αυτόματου ελέγχου (ρύθμισης), παρακάτω παρουσιάζουμε μια ταξινόμηση ανά τύπο μαθηματικής περιγραφής για γραμμικά ACS (ACS):
1) Γραμμικά συστήματα αυτόματου ελέγχου που περιγράφονται σε μεταβλητές εισόδου-εξόδου από συνήθεις διαφορικές εξισώσεις (ΣΔΕ) με μόνιμος συντελεστές:


όπου x (τ) – αντίκτυπος εισροών· ε (τ) – ενέργεια εξόδου (ρυθμιζόμενη τιμή).
Αν χρησιμοποιήσουμε τη μορφή τελεστή ("συμπαγής") για τη σύνταξη μιας γραμμικής ΣΔΕ, τότε η εξίσωση (1.4.1) μπορεί να αναπαρασταθεί με την ακόλουθη μορφή:

Οπου, p = d/dt — τελεστής διαφοροποίησης· Λ(π), Ν(π) — οι αντίστοιχοι γραμμικοί διαφορικοί τελεστές, οι οποίοι ισούνται με:


2) Γραμμικά συστήματα αυτόματου ελέγχου που περιγράφονται από γραμμικές συνήθεις διαφορικές εξισώσεις (ΣΔΕ) με μεταβλητές (σε χρόνο) συντελεστές:


Γενικά, τέτοια συστήματα μπορούν να ταξινομηθούν ως μη γραμμικά συστήματα αυτόματου ελέγχου (ACS).
3) Γραμμικά συστήματα αυτόματου ελέγχου που περιγράφονται από γραμμικές εξισώσεις διαφορών:


όπου φά(…) – γραμμική συνάρτηση ορισμάτων· k = 1, 2, 3… — ακέραιοι αριθμοί· Δt – διάστημα κβάντωσης (διάστημα δειγματοληψίας).
Η εξίσωση (1.4.4) μπορεί να αναπαρασταθεί σε «συμπαγή» μορφή:

Συνήθως, μια τέτοια περιγραφή των γραμμικών συστημάτων αυτόματου ελέγχου (ACS) χρησιμοποιείται σε ψηφιακά συστήματα ελέγχου (χρησιμοποιώντας υπολογιστές).
4) Γραμμικά συστήματα αυτόματου ελέγχου με καθυστέρηση:

όπου Λ(π), Ν(π) — γραμμικοί διαφορικοί τελεστές· τ — χρόνος καθυστέρησης ή σταθερά καθυστέρησης.
Εάν οι χειριστές Λ(π) и Ν(π) εκφυλισμένος (L(p) = 1; N(p) = 1), τότε η εξίσωση (1.4.6) αντιστοιχεί στη μαθηματική περιγραφή της δυναμικής του ιδανικού συνδέσμου καθυστέρησης:

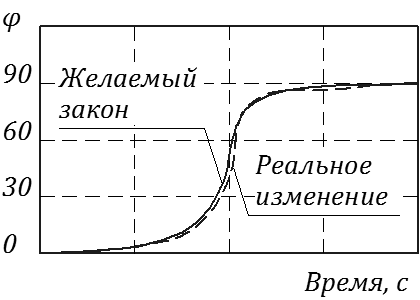
και μια γραφική απεικόνιση των ιδιοτήτων του δίνεται στο Σχήμα 1.4.1
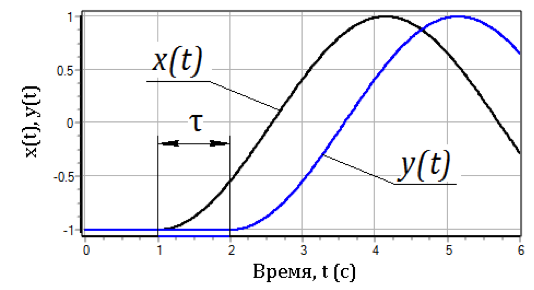
Σχήμα 1.4.1 — Γραφήματα εισόδου και εξόδου του ιδανικού συνδέσμου καθυστέρησης
5) Γραμμικά συστήματα αυτόματου ελέγχου που περιγράφονται από γραμμικές διαφορικές εξισώσεις στο μερικές παράγωγοιΤέτοιες SAU συχνά ονομάζονται διανεμημένο συστήματα ελέγχου. ==> Ένα «αφηρημένο» παράδειγμα μιας τέτοιας περιγραφής:

Το σύστημα εξισώσεων (1.4.7) περιγράφει τη δυναμική ενός γραμμικά κατανεμημένου ACS, δηλαδή η ελεγχόμενη μεταβλητή εξαρτάται όχι μόνο από τον χρόνο, αλλά και από μία χωρική συντεταγμένη.
Αν το σύστημα ελέγχου είναι ένα «χωρικό» αντικείμενο, τότε ==>

όπου  εξαρτάται από τις χρονικές και χωρικές συντεταγμένες που καθορίζονται από το διάνυσμα ακτίνας
εξαρτάται από τις χρονικές και χωρικές συντεταγμένες που καθορίζονται από το διάνυσμα ακτίνας 
6) SAU, περιγράφονται συστήματα ΣΔΕ, ή συστήματα διαφορικών εξισώσεων, ή συστήματα μερικών διαφορικών εξισώσεων ==> και ούτω καθεξής...
Μια παρόμοια ταξινόμηση μπορεί να προταθεί για μη γραμμικά συστήματα αυτόματου ελέγχου (ACS)…
Για τα γραμμικά συστήματα πληρούνται οι ακόλουθες απαιτήσεις:
- γραμμικότητα των στατικών χαρακτηριστικών του συστήματος αυτόματου ελέγχου·
- γραμμικότητα της εξίσωσης δυναμικής, δηλαδή οι μεταβλητές στην εξίσωση δυναμικής περιλαμβάνονται μόνο σε γραμμικό συνδυασμό.
Ένα στατικό χαρακτηριστικό είναι η εξάρτηση της εξόδου από το μέγεθος της επίδρασης εισόδου σε σταθερή κατάσταση (όταν όλες οι παροδικές διεργασίες έχουν σταματήσει).
Για συστήματα που περιγράφονται από γραμμικές συνήθεις διαφορικές εξισώσεις με σταθερούς συντελεστές, το στατικό χαρακτηριστικό λαμβάνεται από τη δυναμική εξίσωση (1.4.1) εξισώνοντας όλους τους μη στάσιμους όρους με το μηδέν ==>

Το Σχήμα 1.4.2 δείχνει παραδείγματα γραμμικών και μη γραμμικών στατικών χαρακτηριστικών συστημάτων αυτόματου ελέγχου (ρύθμισης).
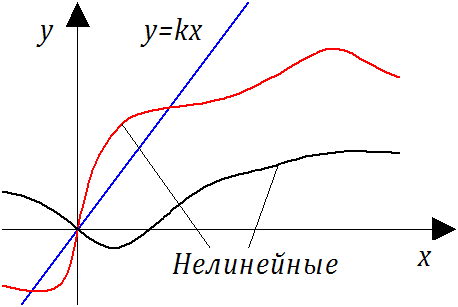
Σχήμα 1.4.2 — Παραδείγματα στατικών γραμμικών και μη γραμμικών χαρακτηριστικών
Η μη γραμμικότητα των όρων που περιέχουν χρονικές παραγώγους στις δυναμικές εξισώσεις μπορεί να προκύψει όταν χρησιμοποιούνται μη γραμμικές μαθηματικές πράξεις (*, /,  ,
,  , sin, ln, κ.λπ.). Για παράδειγμα, λαμβάνοντας υπόψη την εξίσωση δυναμικής κάποιου «αφηρημένου» ACS
, sin, ln, κ.λπ.). Για παράδειγμα, λαμβάνοντας υπόψη την εξίσωση δυναμικής κάποιου «αφηρημένου» ACS

σημειώστε ότι σε αυτήν την εξίσωση με γραμμικό στατικό χαρακτηριστικό  ο δεύτερος και ο τρίτος όρος (δυναμικοί όροι) στην αριστερή πλευρά της εξίσωσης είναι μη γραμμικό, επομένως το ACS που περιγράφεται από μια τέτοια εξίσωση είναι μη γραμμικό σε δυναμικός σχέδιο.
ο δεύτερος και ο τρίτος όρος (δυναμικοί όροι) στην αριστερή πλευρά της εξίσωσης είναι μη γραμμικό, επομένως το ACS που περιγράφεται από μια τέτοια εξίσωση είναι μη γραμμικό σε δυναμικός σχέδιο.
1.4.2. Ταξινόμηση ανάλογα με τη φύση των μεταδιδόμενων σημάτων
Ανάλογα με τη φύση των μεταδιδόμενων σημάτων, τα συστήματα αυτόματου ελέγχου (ή ρύθμισης) χωρίζονται σε:
- συνεχή συστήματα (συστήματα συνεχούς δράσης)·
- συστήματα ρελέ (συστήματα δράσης ρελέ)·
- συστήματα διακριτής δράσης (παλμικά και ψηφιακά).
Σύστημα συνεχής ενέργειες ονομάζεται ένα τέτοιο ACS, σε κάθε έναν από τους συνδέσμους του οποίου συνεχής αλλαγή στο σήμα εισόδου με την πάροδο του χρόνου αντιστοιχεί σε συνεχή αλλαγή του σήματος εξόδου, ενώ ο νόμος αλλαγής του σήματος εξόδου μπορεί να είναι αυθαίρετος. Για να είναι συνεχές το ACS, είναι απαραίτητο τα στατικά χαρακτηριστικά όλων οι σύνδεσμοι ήταν συνεχείς.
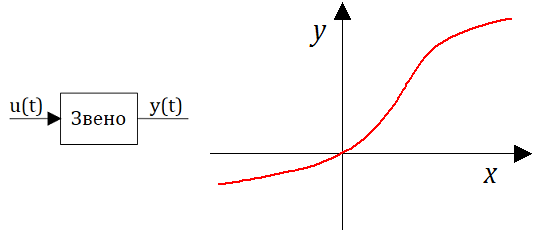
Σχήμα 1.4.3 - Παράδειγμα συνεχούς συστήματος
Σύστημα αναμετάδοση Μια ενέργεια ονομάζεται ACS, στην οποία τουλάχιστον σε έναν σύνδεσμο, με μια συνεχή αλλαγή στην τιμή εισόδου, η τιμή εξόδου σε ορισμένες στιγμές της διαδικασίας ελέγχου αλλάζει "σε ένα άλμα" ανάλογα με την τιμή του σήματος εισόδου. Το στατικό χαρακτηριστικό ενός τέτοιου συνδέσμου έχει σημεία θραύσης ή κάταγμα με ρήξη.
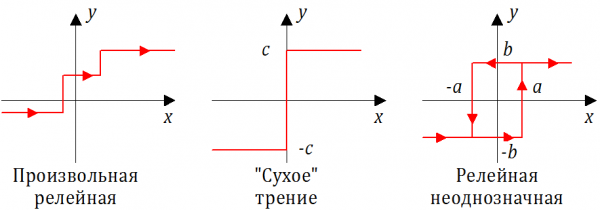
Σχήμα 1.4.4 - Παραδείγματα στατικών χαρακτηριστικών ρελέ
Σύστημα διακεκριμένος Η ενέργεια είναι ένα σύστημα στο οποίο τουλάχιστον σε έναν σύνδεσμο, με συνεχή αλλαγή στην τιμή εισόδου, η τιμή εξόδου έχει προβολή μεμονωμένων παλμών, που εμφανίζεται μετά από ένα ορισμένο χρονικό διάστημα.
Η σύνδεση που μετατρέπει ένα συνεχές σήμα σε διακριτό σήμα ονομάζεται παλμική σύνδεση. Αυτός ο τύπος μεταδιδόμενων σημάτων συμβαίνει σε ένα ACS με υπολογιστή ή ελεγκτή.
Οι πιο συχνά εφαρμοζόμενες μέθοδοι (αλγόριθμοι) για τη μετατροπή ενός συνεχούς σήματος εισόδου σε ένα παλμικό σήμα εξόδου είναι:
- διαμόρφωση πλάτους παλμού (PAM)
- Διαμόρφωση πλάτους παλμού (PWM).
Το Σχήμα 1.4.5 δείχνει μια γραφική απεικόνιση του αλγορίθμου διαμόρφωσης πλάτους-παλμού (APM). Το πάνω μέρος του σχήματος δείχνει την εξάρτηση από τον χρόνο x (τ) - σήμα στην είσοδο στη σύνδεση παλμών. Το σήμα εξόδου του μπλοκ παλμών (σύνδεση) ε (τ) – μια ακολουθία ορθογώνιων παλμών που εμφανίζονται με μόνιμος περίοδος κβάντωσης Δt (βλ. το κάτω μέρος του σχήματος). Η διάρκεια του παλμού είναι η ίδια και ίση με Δ. Το πλάτος του παλμού στην έξοδο του μπλοκ είναι ανάλογο με την αντίστοιχη τιμή του συνεχούς σήματος x(t) στην είσοδο αυτού του μπλοκ.
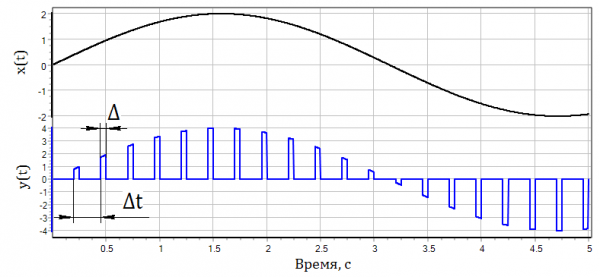
Σχήμα 1.4.5 — Υλοποίηση διαμόρφωσης πλάτους-παλμού
Αυτή η μέθοδος διαμόρφωσης παλμών χρησιμοποιήθηκε ευρέως στον ηλεκτρονικό εξοπλισμό μέτρησης συστημάτων ελέγχου και προστασίας (CPS) πυρηνικών σταθμών ηλεκτροπαραγωγής (NPP) στις δεκαετίες του '70 και του '80 του περασμένου αιώνα.
Το Σχήμα 1.4.6 δείχνει μια γραφική απεικόνιση του αλγορίθμου διαμόρφωσης πλάτους παλμού (PWM). Το πάνω μέρος του Σχήματος 1.14 δείχνει την εξάρτηση από τον χρόνο x (τ) – σήμα στην είσοδο της παλμικής ζεύξης. Σήμα εξόδου του παλμικού μπλοκ (ζεύξης) ε (τ) – μια ακολουθία ορθογώνιων παλμών που εμφανίζονται με σταθερή περίοδο κβαντισμού Δt (βλ. το κάτω μέρος του Σχήματος 1.14). Το πλάτος όλων των παλμών είναι το ίδιο. Η διάρκεια του παλμού είναι Δt στην έξοδο του μπλοκ είναι ανάλογη με την αντίστοιχη τιμή του συνεχούς σήματος x (τ) στην είσοδο του παλμικού μπλοκ.
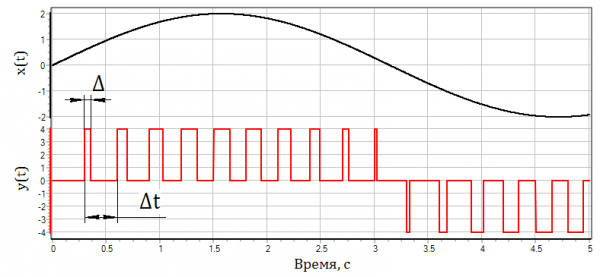
Σχήμα 1.4.6 — Υλοποίηση διαμόρφωσης πλάτους παλμού
Αυτή η μέθοδος διαμόρφωσης παλμών είναι σήμερα η πιο διαδεδομένη στον ηλεκτρονικό εξοπλισμό μέτρησης συστημάτων ελέγχου και προστασίας (CPS) πυρηνικών σταθμών ηλεκτροπαραγωγής (NPP) και ACS άλλων τεχνικών συστημάτων.
Συμπερασματικά, είναι απαραίτητο να σημειωθεί ότι εάν οι χαρακτηριστικές χρονικές σταθερές σε άλλους συνδέσμους του ACS (SAR) σημαντικά περισσότερο Δt (κατά τάξεις μεγέθους), τότε το σύστημα παλμών μπορεί να θεωρηθεί ως ένα σύστημα συνεχούς αυτόματου ελέγχου (όταν χρησιμοποιείται τόσο AIM όσο και PWM).
1.4.3. Ταξινόμηση ανάλογα με τη φύση της διαχείρισης
Ανάλογα με τη φύση των διαδικασιών ελέγχου, τα συστήματα αυτόματου ελέγχου χωρίζονται στους ακόλουθους τύπους:
- ντετερμινιστικό ACS, στο οποίο σε ένα σήμα εισόδου μπορεί να αντιστοιχιστεί μοναδικά ένα σήμα εξόδου (και αντίστροφα)·
- στοχαστικό ACS (στατιστικό, πιθανοτικό), στο οποίο το ACS «ανταποκρίνεται» σε ένα δεδομένο σήμα εισόδου τυχαία (στοχαστικό) σήμα εξόδου.
Το στοχαστικό σήμα εξόδου χαρακτηρίζεται από:
- δίκαιο της διανομής·
- μαθηματική προσδοκία (μέση τιμή)·
- διασπορά (τυπική απόκλιση).
Η στοχαστική φύση της διαδικασίας ελέγχου παρατηρείται συνήθως σε ουσιαστικά μη γραμμικό ACS τόσο από την άποψη των στατικών χαρακτηριστικών όσο και από την άποψη (ακόμα και σε μεγαλύτερο βαθμό) της μη γραμμικότητας των δυναμικών όρων στις δυναμικές εξισώσεις.
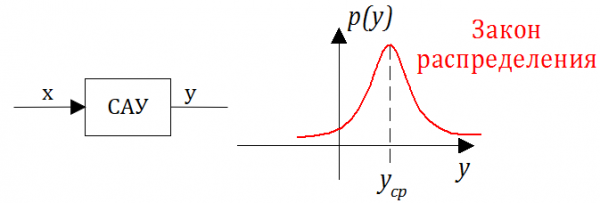
Σχήμα 1.4.7 — Κατανομή της τιμής εξόδου ενός στοχαστικού συστήματος ελέγχου
Εκτός από τους κύριους τύπους ταξινόμησης συστημάτων ελέγχου, υπάρχουν και άλλες ταξινομήσεις. Για παράδειγμα, η ταξινόμηση μπορεί να πραγματοποιηθεί με τη μέθοδο ελέγχου και να βασίζεται στην αλληλεπίδραση με το εξωτερικό περιβάλλον και στην ικανότητα προσαρμογής του ACS στις αλλαγές των περιβαλλοντικών παραμέτρων. Τα συστήματα χωρίζονται σε δύο μεγάλες κατηγορίες:
1) Συμβατικά (μη αυτορυθμιζόμενα) συστήματα ελέγχου χωρίς προσαρμογή· αυτά τα συστήματα ταξινομούνται ως απλά, χωρίς να αλλάζουν τη δομή τους κατά τη διάρκεια της διαδικασίας ελέγχου. Είναι τα πιο ανεπτυγμένα και ευρέως χρησιμοποιούμενα. Τα συμβατικά συστήματα ελέγχου χωρίζονται σε τρεις υποκατηγορίες: ανοιχτά, κλειστά και συνδυασμένα συστήματα ελέγχου.
2) Αυτορυθμιζόμενα (προσαρμοστικά) συστήματα ελέγχου. Σε αυτά τα συστήματα, όταν αλλάζουν οι εξωτερικές συνθήκες ή τα χαρακτηριστικά του αντικειμένου ελέγχου, συμβαίνει μια αυτόματη (όχι προκαθορισμένη) αλλαγή στις παραμέτρους της συσκευής ελέγχου λόγω αλλαγής στους συντελεστές του συστήματος ελέγχου, στη δομή του συστήματος ελέγχου ή ακόμα και στην εισαγωγή νέων στοιχείων.
Ένα άλλο παράδειγμα ταξινόμησης: με ιεραρχικό κριτήριο (μονοεπίπεδο, διεπίπεδο, πολυεπίπεδο).
Μόνο εγγεγραμμένοι χρήστες μπορούν να συμμετάσχουν στην έρευνα. , Σας παρακαλούμε.
Να συνεχίσω να δημοσιεύω διαλέξεις για το UTS;
-
88,7%Ναι 118
-
7,5%Νο10
-
3,8%Δεν ξέρω5
Ψήφισαν 133 χρήστες. 10 χρήστες απείχαν.
Πηγή: www.habr.com
