


See artikkel avab artiklite sarja, mis on pühendatud automatiseeritud meetoditele PID-regulaatorite seadistamiseks Simulinki keskkonnas. Täna uurime, kuidas töötada PID Tuner rakendusega.
Sissejuhatus
Tööstuses kõige laialdasemalt kasutatav regulaatorite tüüp sulgemise süsteemide juhtimises on PID-regulaatorid. Kui inseneridel on veel ülikooli päevilt meeles regulaatori struktuur ja toimimise põhimõte, siis selle seadistamine, st regulaatori koefitsientide arvutamine, on endiselt probleem. On olemas suur hulk kirjandust, nii välismaist (näiteks [1, 2]) kui ka kodumaist (näiteks [3, 4]), kus regulaatorite seadistamine on selgitatud üsna keeruka automaatkontrolli teooria keele abil.
Selles artiklite sarjas kirjeldatakse automatiseeritud meetodeid PID-regulaatorite seadistamiseks Simulinki keskkonnas, kasutades selliseid tööriistu nagu:
- PID Tuner,
- Response Optimizer,
- Control System Tuner,
- Frequency Response Based PID Tuner,
- Closed-Loop PID Autotuner.
Süsteemi juhtimiseks kasutatakse alalisvoolumootoril põhinevat elektrimootorit, millel on alaliste magnetitega erutus, töötades koos inertsialaste koormuse reduktoriga, millel on järgmised parameetrid:
- mootori toitepinge,
 ;
; - mootori ankru mähise aktiivne takistus, ;
- mootori ankru mähise induktiivne takistus, ;
- mootori pöördemomentide koefitsient, ;
- mootori rootori inertsimoment, .
 ;
;  ;
;  ;
;  ;
;  .
.Koormuse ja reduktori parameetrid:
- koormuse inertsimoment, ;
- reduktori ülekandearv, .
 ;
;  .
.Artiklid ei sisalda praktiliselt matemaatilisi valemeid, kuid soovitav on, et lugejal oleks põhilised teadmised automaatika teooriast ja kogemused Simulink keskkonnas modelleerimisel, et mõista esitatud materjali.
Süsteemi mudel
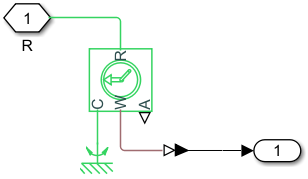
Vaadakem lineaarset süsteemi, mis kontrollib jälgiva elektrimootori nurkkiirus, mille lihtsustatud struktuurskeem on esitatud allpool.

Esitatud struktuuri kohaselt on Simulink keskkonnas loodud sellise süsteemi mudel.

Elektrilise ajami (Electric actuator) ja inertskoormuse (Load) mudelid on loodud füüsikalise modelleerimise teegi plokkide abil :
- elektrilise ajami mudel,
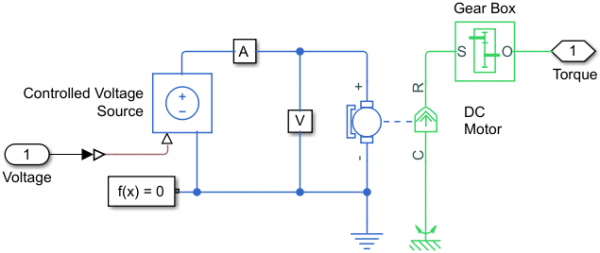
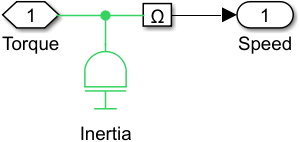
- inertskoormuse mudel.
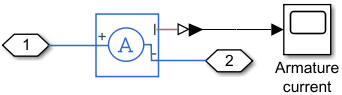
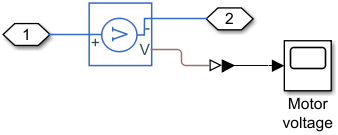
Elektrilise ajami ja koormuse mudelid sisaldavad ka erinevate füüsikaliste suuruste andurialasid:
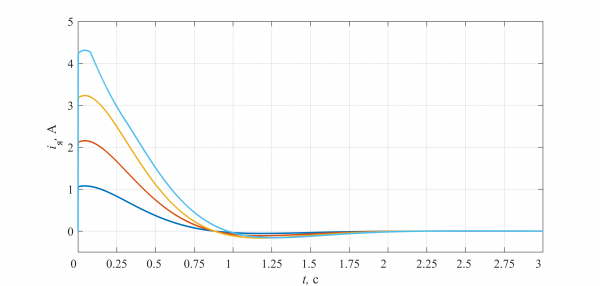
- mootori rotorimähiste kaudu voolava voolu (A allüksus),
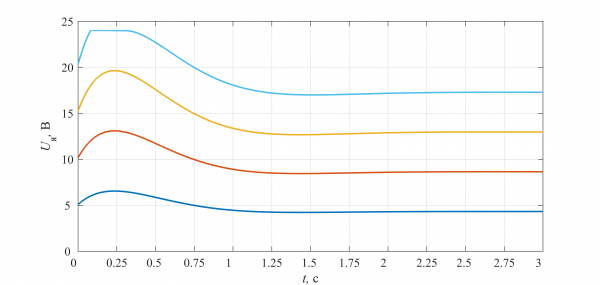
- tema mähiste pinget (V allüksus),
- juhtimisseadme nurkkiirus (Ω allüksus).
Enne PID-regulaatori parameetrite seadistamist viime mudeli läbi arvutuse, võttes arvesse regulaatori edastusfunktsiooni  . Simuleerimise tulemused sisendsignaaliga 150 p/min on toodud allpool.
. Simuleerimise tulemused sisendsignaaliga 150 p/min on toodud allpool.
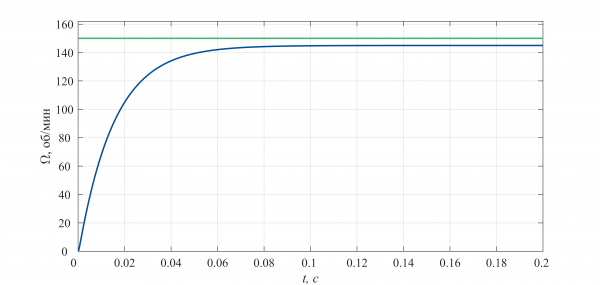
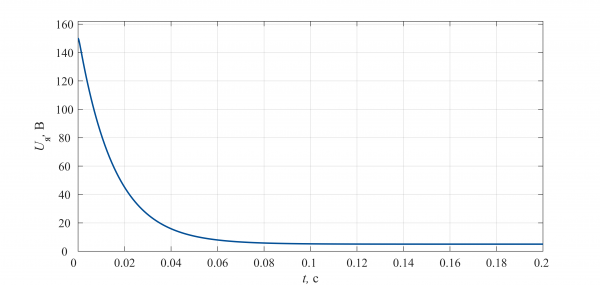
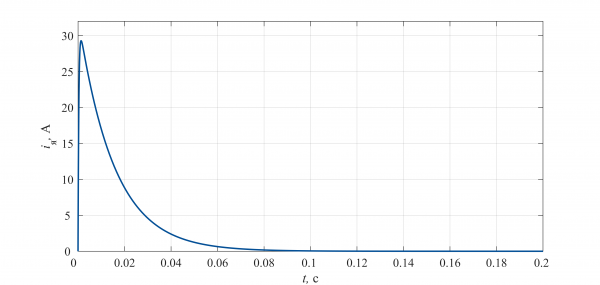
Esitatud graafikute analüüsist nähtub, et:
- Juhtimissüsteemi väljundkoordinatsioon ei saavuta määratud väärtust, st süsteemis esineb staatiline viga.
- Mootori mähiste pinge tõuseb 150 V-ni simuleerimise alguses, mis võib põhjustada selle rikke, kuna mootori mähistele antakse rohkem pinget kui nominaalne (24 V).
Süsteemi reaktsioon üheainsa impulsi suhtes peab vastama järgmistele nõuetele:
- ülekorretsioon (Overshoot) mitte rohkem kui 10%,
- kasvuaeg (Rise time) alla 0,8 s,
- üleminekuperioodi aeg (Settling time) alla 2 s.
Lisaks peab regulaator piirama mootori mähise sisendpinget toitepingest.
Regulaatori konfigureerimine
Regulaatori parameetreid saab seadistada tööriista , mis on saadaval otse PID Controller ploki parameetrite aknas.
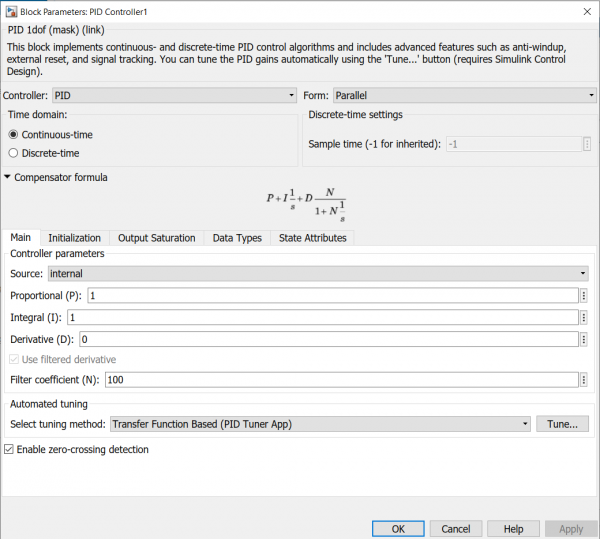
Rakendust käivitatakse, vajutades nuppu Tune…, mis asub Automated tuning. Tuleb märkida, et enne regulatsiooni parameetrite seadistamist tuleb valida selle tüüp (P, PI, PD jne) ja tüüp (analoogne või diskreetne).
Kuna üheks nõudeks on piirata selle väljundkoordinaati (pinget mootori mähises), tuleb määrata lubatud pingete vahemik. Selleks:
- Läheme vahekaardile Output Saturation.
- Vajutage lippnuppu Limit output, mille tulemusena aktiveeritakse ülemise (Upper limit) ja alumise (Lower limit) piiri väljundväärtuse määramiseks väljad.
- Seame vahemikud.
Regulaatori ploki korrektne töö eeldab meetodite kasutamist, mis on suunatud integraalse küllastumise vastu võitlemisele. Plokis on rakendatud kaks meetodit: back-calculation ja clamping. Üksikasjalik teave nende meetodite kohta asub . Meetodi valimise rippmenüü on paanil Anti-windup.
Käesoleval juhul kirjutame väärtused 24 ja -24 vastavatesse väljadese Ülemine piir ja Alumine piir vastavalt ja kasutame meetodit clamping, et välistada integraalne küllastumine.
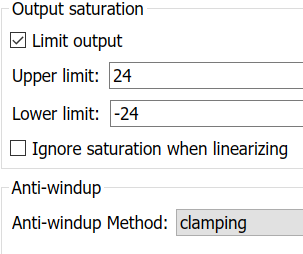
On märgata, et regulaatori ploki välimus on muutunud: ploki väljundporti kõrval on ilmnenud küllastumise märk.
Edasi, vajutades nuppu, aktsepteerime kõik muudatused Kinnita, naaseme vahekaardile Peamine ja vajutame nuppu Tune…, mille tulemuseks avaneb PIDTuner rakenduse uus aken.
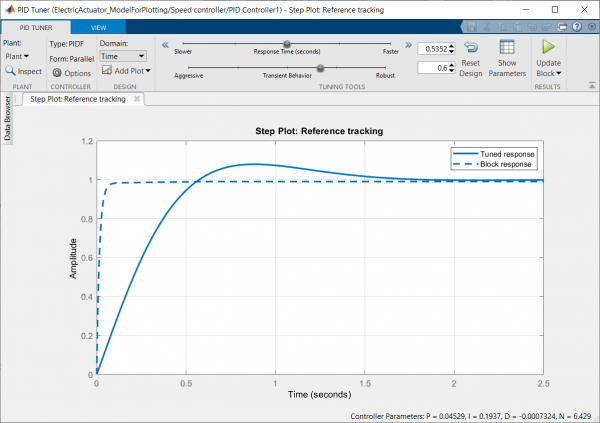
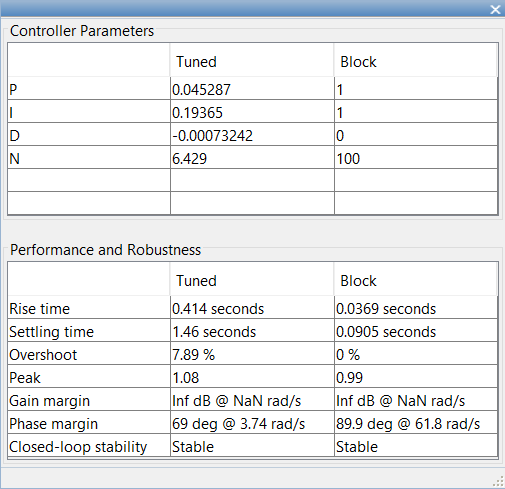
Akna graafilises piirkonnas kuvatakse kaks üleminekuprotsessi: praeguste regulaatori parameetrite puhul, st reguleerimisseadmata regulaatori puhul, ja automaatselt valitud väärtuste puhul. Uusi parameetrite väärtusi saab vaadata, vajutades nuppu Näita parameetreid, mis asub tööriistaribal. Nuppu vajutades ilmuvad kaks tabelit: reguleerija parameetrid (Controller Parameters) ja saadud üleminekuprotsessi omaduste hinnangud valitud parameetrite puhul (Performance and Robustness).
Kuidas näha teise tabeli väärtustest, automaatselt arvutatud reguleerija koefitsiendid vastavad kõikidele nõuetele.
Reguleerija seadistamine lõpeb nupu vajutamisega, millel on roheline kolmnurk, mis asub paremal pool nupukesest. Näita parameetreid, pärast mida uued parameetri väärtused muudetakse automaatselt PID Controller parameetrite seadistamise aknas vastavatesse väljadesse.
Seadistatud reguleerijaga süsteemi modelleerimise tulemused mitmete sisenemisignaalide jaoks on toodud allpool. Suurte sissejuhatavate signaalide tasemete korral (sinine joon) töötab süsteem pingesurumise režiimis.
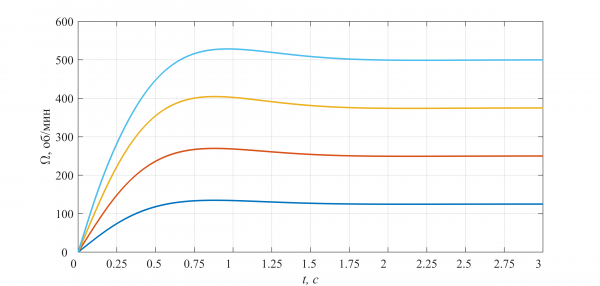
Oluline on märkida, et PID Tuner tööriist valib reguleerija koefitsiendid lineaarses mudelis, seetõttu tuleb mittelineaarse mudeli puhul selle parameetreid täpsustada. Sellisel juhul võib kasutada rakendust .
Kirjandus
- Handbook of PI and PID Controller Tuning Rules. Aidan O’Dwyer
- PID juhtimissüsteemi projekteerimine ja automaatne häälestamine MATLAB-i ja Simulinki abil. Wang L.
- PID-juhtimine mitteformaalsetes tingimustes. Karpov V.E.
- PID-regulaatorid. Elluviimise küsimused. Osad 1, 2. Denisenko V.
Allikas: habr.com
