

На прошедшем PHDays 9 мы проводили соревнование по взлому завода по перекачке газа — конкурс . На площадке было три стенда с различными параметрами безопасности (No Security, Low Security, High Security), эмулирующих одинаковый индустриальный процесс: в воздушный шар закачивался (а потом спускался) воздух под давлением.
Несмотря на разные параметры безопасности, аппаратный состав стендов был одинаков: ПЛК Siemens Simatic серии S7-300; кнопка аварийного сдува и прибор измерения давления (подсоединены к цифровым входам ПЛК (DI)); клапаны, работающие на накачку и спуск воздуха (подсоединены к цифровым выходам ПЛК (DO)) — см. рисунок ниже.

ПЛК, в зависимости от показаний давления и в соответствии со своей программой, принимал решение о сдуве или надуве шарика (открывал и закрывал соответствующие клапаны). Однако на всех стендах был предусмотрен режим ручного управления, который давал возможность управлять состояниями клапанов без каких-либо ограничений.
Стенды отличались сложностью включения данного режима: на незащищенном стенде сделать это было проще всего, а на стенде High Security, соответственно, сложнее.
За два дня были решены пять из шести задач; участник, занявший первое место, заработал 233 балла (он потратил на подготовку к конкурсу неделю). Тройка призеров: I место — a1exdandy, II — Rubikoid, III — Ze.
Однако во время PHDays никто из участников не смог одолеть все три стенда, поэтому мы решили сделать онлайн-конкурс и в начале июня опубликовали самое сложное задание. Участники должны были за месяц выполнить задание, найти флаг, подробно и интересно описать решение.
Под катом мы публикуем разбор лучшего решения задания из присланных за месяц, его нашел Алексей Коврижных (a1exdandy) из компании Digital Security, который занял I место в конкурсе во время PHDays. Ниже мы приводим его текст с нашими комментариями.
Первоначальный анализ
Итак, в задании был архив с файлами:
- block_upload_traffic.pcapng
- DB100.bin
- hints.txt
Файл hints.txt содержит необходимые сведения и подсказки для решения задания. Вот его содержимое:
- Петрович мне вчера рассказал, что из PlcSim можно загрузить блоки в Step7.
- На стенде использовался ПЛК Siemens Simatic серии S7-300.
- PlcSim — это эмулятор ПЛК, позволяющий выполнять и отлаживать программы для ПЛК Siemens S7.
Файл DB100.bin, судя по всему, содержит блок данных DB100 ПЛК: 00000000: 0100 0102 6e02 0401 0206 0100 0101 0102 ....n........... 00000010: 1002 0501 0202 2002 0501 0206 0100 0102 ...... ......... 00000020: 0102 7702 0401 0206 0100 0103 0102 0a02 ..w............. 00000030: 0501 0202 1602 0501 0206 0100 0104 0102 ................ 00000040: 7502 0401 0206 0100 0105 0102 0a02 0501 u............... 00000050: 0202 1602 0501 0206 0100 0106 0102 3402 ..............4. 00000060: 0401 0206 0100 0107 0102 2602 0501 0202 ..........&..... 00000070: 4c02 0501 0206 0100 0108 0102 3302 0401 L...........3... 00000080: 0206 0100 0109 0102 0a02 0501 0202 1602 ................ 00000090: 0501 0206 0100 010a 0102 3702 0401 0206 ..........7..... 000000a0: 0100 010b 0102 2202 0501 0202 4602 0501 ......".....F... 000000b0: 0206 0100 010c 0102 3302 0401 0206 0100 ........3....... 000000c0: 010d 0102 0a02 0501 0202 1602 0501 0206 ................ 000000d0: 0100 010e 0102 6d02 0401 0206 0100 010f ......m......... 000000e0: 0102 1102 0501 0202 2302 0501 0206 0100 ........#....... 000000f0: 0110 0102 3502 0401 0206 0100 0111 0102 ....5........... 00000100: 1202 0501 0202 2502 0501 0206 0100 0112 ......%......... 00000110: 0102 3302 0401 0206 0100 0113 0102 2602 ..3...........&. 00000120: 0501 0202 4c02 0501 0206 0100 ....L.......
Судя по названию, файл block_upload_traffic.pcapng содержит дамп трафика загрузки блоков на ПЛК.
Стоит отметить, что этот дамп трафика на площадке конкурса во время конференции получить было немного сложнее. Для этого необходимо было разобраться в скрипте из файла проекта для TeslaSCADA2. Из него можно было понять, где находится зашифрованный с помощью RC4 дамп и какой ключ необходимо использовать для его расшифровки. Дампы блоков данных на площадке можно было получить с помощью клиента протокола S7. Я для этого использовал демоклиент из пакета Snap7.
Извлечение блоков обработки сигнала из дампа трафика
Взглянув на содержимое дампа, можно понять, что в нем передаются блоки обработки сигнала OB1, FC1, FC2 и FC3:
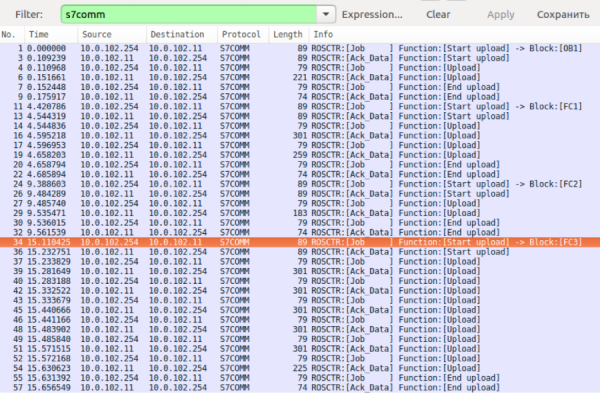
Необходимо извлечь эти блоки. Это можно сделать, например, следующим скриптом, предварительно сконвертировав трафик из формата pcapng в pcap:
#!/usr/bin/env python2
import struct
from scapy.all import *
packets = rdpcap('block_upload_traffic.pcap')
s7_hdr_struct = '>BBHHHHBB'
s7_hdr_sz = struct.calcsize(s7_hdr_struct)
tpkt_cotp_sz = 7
names = iter(['OB1.bin', 'FC1.bin', 'FC2.bin', 'FC3.bin'])
buf = ''
for packet in packets:
if packet.getlayer(IP).src == '10.0.102.11':
tpkt_cotp_s7 = str(packet.getlayer(TCP).payload)
if len(tpkt_cotp_s7) < tpkt_cotp_sz + s7_hdr_sz:
continue
s7 = tpkt_cotp_s7[tpkt_cotp_sz:]
s7_hdr = s7[:s7_hdr_sz]
param_sz = struct.unpack(s7_hdr_struct, s7_hdr)[4]
s7_param = s7[12:12+param_sz]
s7_data = s7[12+param_sz:]
if s7_param in ('x1ex00', 'x1ex01'): # upload
buf += s7_data[4:]
elif s7_param == 'x1f':
with open(next(names), 'wb') as f:
f.write(buf)
buf = ''Изучив полученные блоки, можно заметить, что они всегда начинаются с байтов 70 70 (pp). Теперь нужно научиться их анализировать. Подсказка к заданию наводит на мысль, что для этого необходимо использовать PlcSim.
Получение человекочитаемых инструкций из блоков
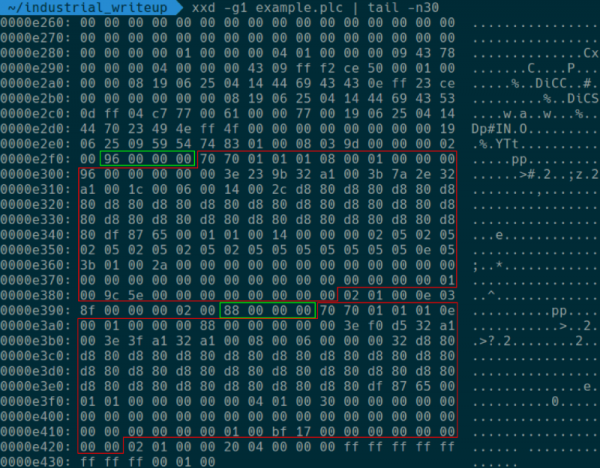
Для начала попробуем запрограммировать S7-PlcSim, загрузив в него несколько блоков с повторяющимися инструкциями (= Q 0.0) с помощью ПО Simatic Manager, и сохраним полученный в эмуляторе PLC в файл example.plc. Посмотрев на содержимое файла, можно легко определить начало загруженных блоков по сигнатуре 70 70, которую мы обнаружили ранее. Перед блоками, судя по всему, записан размер блока в виде 4-байтового little-endian значения.
После того как мы получили сведения о структуре plc-файлов, появился следующий план действий для чтения программ PLC S7:
- С помощью Simatic Manager создаем в S7-PlcSim структуру блоков, аналогичную той, что мы получили из дампа. Должны совпадать размеры блоков (достигается с помощью наполнения блоков нужным количеством инструкций) и их идентификаторы (OB1, FC1, FC2, FC3).
- Сохраняем PLC в файл.
- Заменяем содержимое блоков в полученном файле на блоки из дампа трафика. Начало блоков определяем по сигнатуре.
- Полученный файл загружаем в S7-PlcSim и смотрим содержимое блоков в Simatic Manager.
Замену блоков можно произвести, например, следующим кодом:
with open('original.plc', 'rb') as f:
plc = f.read()
blocks = []
for fname in ['OB1.bin', 'FC1.bin', 'FC2.bin', 'FC3.bin']:
with open(fname, 'rb') as f:
blocks.append(f.read())
i = plc.find(b'pp')
for block in blocks:
plc = plc[:i] + block + plc[i+len(block):]
i = plc.find(b'pp', i + 1)
with open('target.plc', 'wb') as f:
f.write(plc)Алексей пошел по, возможно, более сложному, но все равно правильному пути. Мы предполагали, что участники воспользуются программой NetToPlcSim, чтобы c PlcSim можно было общаться по сети, загрузят блоки в PlcSim через Snap7, а потом скачают эти блоки в виде проекта из PlcSim с помощью среды разработки.
Открыв полученный файл в S7-PlcSim, можно прочитать перезаписанные блоки с помощью Simatic Manager. Основные функции управления устройствами записаны в блоке FC1. Особое внимание привлекает переменная #TEMP0, при включении которой, судя по всему, управление ПЛК переводится в ручной режим на основе значений битовой памяти M2.2 и M2.3. Значение #TEMP0 устанавливается функцией FC3.
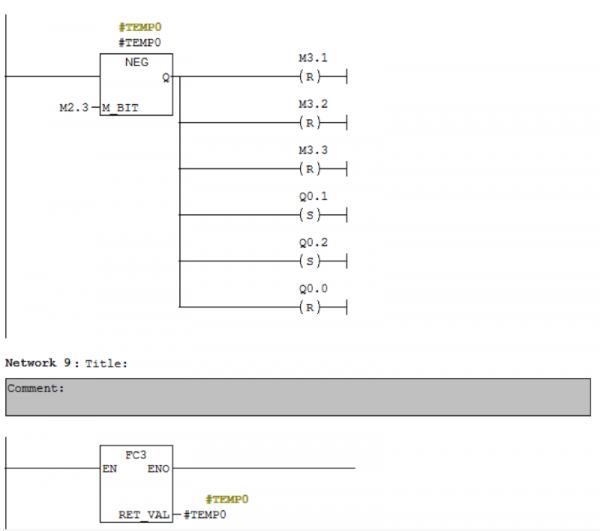
Для решения задания необходимо проанализировать функцию FC3 и понять, что нужно сделать, чтобы она вернула логическую единицу.
Блоки обработки сигналов ПЛК на стенде Low Security на площадке конкурса были устроены аналогичным образом, но для установки значения переменной #TEMP0 достаточно было написать строку my ninja way в блок DB1. Проверка значения в блоке была устроена понятно и не требовала глубоких знаний языка программирования блоков. Очевидно, что на уровне High Security добиться ручного управления будет значительно сложнее и необходимо разбираться в тонкостях языка STL (один из способов программирования ПЛК S7).
Реверс блока FC3
Содержимое блока FC3 в STL представлении:
L B#16#0
T #TEMP13
T #TEMP15
L P#DBX 0.0
T #TEMP4
CLR
= #TEMP14
M015: L #TEMP4
LAR1
OPN DB 100
L DBLG
TAR1
<=D
JC M016
L DW#16#0
T #TEMP0
L #TEMP6
L W#16#0
<>I
JC M00d
L P#DBX 0.0
LAR1
M00d: L B [AR1,P#0.0]
T #TEMP5
L W#16#1
==I
JC M007
L #TEMP5
L W#16#2
==I
JC M008
L #TEMP5
L W#16#3
==I
JC M00f
L #TEMP5
L W#16#4
==I
JC M00e
L #TEMP5
L W#16#5
==I
JC M011
L #TEMP5
L W#16#6
==I
JC M012
JU M010
M007: +AR1 P#1.0
L P#DBX 0.0
LAR2
L B [AR1,P#0.0]
L C#8
*I
+AR2
+AR1 P#1.0
L B [AR1,P#0.0]
JL M003
JU M001
JU M002
JU M004
M003: JU M005
M001: OPN DB 101
L B [AR2,P#0.0]
T #TEMP0
JU M006
M002: OPN DB 101
L B [AR2,P#0.0]
T #TEMP1
JU M006
M004: OPN DB 101
L B [AR2,P#0.0]
T #TEMP2
JU M006
M00f: +AR1 P#1.0
L B [AR1,P#0.0]
L C#8
*I
T #TEMP11
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9
TAR1 #TEMP4
OPN DB 101
L P#DBX 0.0
LAR1
L #TEMP11
+AR1
LAR2 #TEMP9
L B [AR2,P#0.0]
T B [AR1,P#0.0]
L #TEMP4
LAR1
JU M006
M008: +AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP3
+AR1 P#1.0
L B [AR1,P#0.0]
JL M009
JU M00b
JU M00a
JU M00c
M009: JU M005
M00b: L #TEMP3
T #TEMP0
JU M006
M00a: L #TEMP3
T #TEMP1
JU M006
M00c: L #TEMP3
T #TEMP2
JU M006
M00e: +AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP8
L P#M 100.0
LAR2
L #TEMP8
L C#8
*I
+AR2
TAR2 #TEMP10
TAR1 #TEMP4
LAR1 #TEMP9
LAR2 #TEMP10
L B [AR1,P#0.0]
L B [AR2,P#0.0]
AW
INVI
T #TEMP12
L B [AR1,P#0.0]
L B [AR2,P#0.0]
OW
L #TEMP12
AW
T B [AR1,P#0.0]
L DW#16#0
T #TEMP0
L MB 101
T #TEMP1
L MB 102
T #TEMP2
L #TEMP4
LAR1
JU M006
M011: +AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP8
L P#M 100.0
LAR2
L #TEMP8
L C#8
*I
+AR2
TAR2 #TEMP10
TAR1 #TEMP4
LAR1 #TEMP9
LAR2 #TEMP10
L B [AR1,P#0.0]
L B [AR2,P#0.0]
-I
T B [AR1,P#0.0]
L DW#16#0
T #TEMP0
L MB 101
T #TEMP1
L MB 102
T #TEMP2
L #TEMP4
LAR1
JU M006
M012: L #TEMP15
INC 1
T #TEMP15
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP8
L P#M 100.0
LAR2
L #TEMP8
L C#8
*I
+AR2
TAR2 #TEMP10
TAR1 #TEMP4
LAR1 #TEMP9
LAR2 #TEMP10
L B [AR1,P#0.0]
L B [AR2,P#0.0]
==I
JCN M013
JU M014
M013: L P#DBX 0.0
LAR1
T #TEMP4
L B#16#0
T #TEMP6
JU M006
M014: L #TEMP4
LAR1
L #TEMP13
L L#1
+I
T #TEMP13
JU M006
M006: L #TEMP0
T MB 100
L #TEMP1
T MB 101
L #TEMP2
T MB 102
+AR1 P#1.0
L #TEMP6
+ 1
T #TEMP6
JU M005
M010: L P#DBX 0.0
LAR1
L 0
T #TEMP6
TAR1 #TEMP4
M005: TAR1 #TEMP4
CLR
= #TEMP16
L #TEMP13
L L#20
==I
S #TEMP16
L #TEMP15
==I
A #TEMP16
JC M017
L #TEMP13
L L#20
<I
S #TEMP16
L #TEMP15
==I
A #TEMP16
JC M018
JU M019
M017: SET
= #TEMP14
JU M016
M018: CLR
= #TEMP14
JU M016
M019: CLR
O #TEMP14
= #RET_VAL
JU M015
M016: CLR
O #TEMP14
= #RET_VALКод довольно объемный и человеку, незнакомому с STL, может показаться сложным. Разбирать каждую инструкцию в рамках данной статьи нет смысла, подробно с инструкциями и возможностями языка STL можно ознакомиться в соответствующем мануале: . Здесь я приведу тот же самый код после обработки — переименования меток и переменных и добавления комментариев, описывающих алгоритм работы и некоторые конструкции языка STL. Сразу отмечу, что в рассматриваемом блоке реализована виртуальная машина, исполняющая некоторый байт-код, находящийся в блоке DB100, содержимое которого нам известно. Инструкции виртуальной машины представляют собой 1 байт операционного кода и байты аргументов, по одному байту на каждый аргумент. Все рассмотренные инструкции имеют по два аргумента, их значения в комментариях я обозначил как X и Y.
Код после обработки]
# Инициализация различных переменных
L B#16#0
T #CHECK_N # Счетчик успешно пройденных проверок
T #COUNTER_N # Счетчик общего количества проверок
L P#DBX 0.0
T #POINTER # Указатель на текущую инструкцию
CLR
= #PRE_RET_VAL
# Основной цикл работы интерпретатора байт-кода
LOOP: L #POINTER
LAR1
OPN DB 100
L DBLG
TAR1
<=D # Проверка выхода указателя за пределы программы
JC FINISH
L DW#16#0
T #REG0
L #TEMP6
L W#16#0
<>I
JC M00d
L P#DBX 0.0
LAR1
# Конструкция switch - case для обработки различных опкодов
M00d: L B [AR1,P#0.0]
T #OPCODE
L W#16#1
==I
JC OPCODE_1
L #OPCODE
L W#16#2
==I
JC OPCODE_2
L #OPCODE
L W#16#3
==I
JC OPCODE_3
L #OPCODE
L W#16#4
==I
JC OPCODE_4
L #OPCODE
L W#16#5
==I
JC OPCODE_5
L #OPCODE
L W#16#6
==I
JC OPCODE_6
JU OPCODE_OTHER
# Обработчик опкода 01: загрузка значения из DB101[X] в регистр Y
# OP01(X, Y): REG[Y] = DB101[X]
OPCODE_1: +AR1 P#1.0
L P#DBX 0.0
LAR2
L B [AR1,P#0.0] # Загрузка аргумента X (индекс в DB101)
L C#8
*I
+AR2
+AR1 P#1.0
L B [AR1,P#0.0] # Загрузка аргумента Y (индекс регистра)
JL M003 # Аналог switch - case на основе значения Y
JU M001 # для выбора необходимого регистра для записи.
JU M002 # Подобные конструкции используются и в других
JU M004 # операциях ниже для аналогичных целей
M003: JU LOOPEND
M001: OPN DB 101
L B [AR2,P#0.0]
T #REG0 # Запись значения DB101[X] в REG[0]
JU PRE_LOOPEND
M002: OPN DB 101
L B [AR2,P#0.0]
T #REG1 # Запись значения DB101[X] в REG[1]
JU PRE_LOOPEND
M004: OPN DB 101
L B [AR2,P#0.0]
T #REG2 # Запись значения DB101[X] в REG[2]
JU PRE_LOOPEND
# Обработчик опкода 02: загрузка значения X в регистр Y
# OP02(X, Y): REG[Y] = X
OPCODE_2: +AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP3
+AR1 P#1.0
L B [AR1,P#0.0]
JL M009
JU M00b
JU M00a
JU M00c
M009: JU LOOPEND
M00b: L #TEMP3
T #REG0
JU PRE_LOOPEND
M00a: L #TEMP3
T #REG1
JU PRE_LOOPEND
M00c: L #TEMP3
T #REG2
JU PRE_LOOPEND
# Опкод 03 не используется в программе, поэтому пропустим его
...
# Обработчик опкода 04: сравнение регистров X и Y
# OP04(X, Y): REG[0] = 0; REG[X] = (REG[X] == REG[Y])
OPCODE_4: +AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7 # первый аргумент - X
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9 # REG[X]
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP8
L P#M 100.0
LAR2
L #TEMP8
L C#8
*I
+AR2
TAR2 #TEMP10 # REG[Y]
TAR1 #POINTER
LAR1 #TEMP9 # REG[X]
LAR2 #TEMP10 # REG[Y]
L B [AR1,P#0.0]
L B [AR2,P#0.0]
AW
INVI
T #TEMP12 # ~(REG[Y] & REG[X])
L B [AR1,P#0.0]
L B [AR2,P#0.0]
OW
L #TEMP12
AW # (~(REG[Y] & REG[X])) & (REG[Y] | REG[X]) - аналог проверки на равенство
T B [AR1,P#0.0]
L DW#16#0
T #REG0
L MB 101
T #REG1
L MB 102
T #REG2
L #POINTER
LAR1
JU PRE_LOOPEND
# Обработчик опкода 05: вычитание регистра Y из X
# OP05(X, Y): REG[0] = 0; REG[X] = REG[X] - REG[Y]
OPCODE_5: +AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9 # REG[X]
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP8
L P#M 100.0
LAR2
L #TEMP8
L C#8
*I
+AR2
TAR2 #TEMP10 # REG[Y]
TAR1 #POINTER
LAR1 #TEMP9
LAR2 #TEMP10
L B [AR1,P#0.0]
L B [AR2,P#0.0]
-I # ACCU1 = ACCU2 - ACCU1, REG[X] - REG[Y]
T B [AR1,P#0.0]
L DW#16#0
T #REG0
L MB 101
T #REG1
L MB 102
T #REG2
L #POINTER
LAR1
JU PRE_LOOPEND
# Обработчик опкода 06: инкремент #CHECK_N при равенстве регистров X и Y
# OP06(X, Y): #CHECK_N += (1 if REG[X] == REG[Y] else 0)
OPCODE_6: L #COUNTER_N
INC 1
T #COUNTER_N
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP7 # REG[X]
L P#M 100.0
LAR2
L #TEMP7
L C#8
*I
+AR2
TAR2 #TEMP9 # REG[X]
+AR1 P#1.0
L B [AR1,P#0.0]
T #TEMP8
L P#M 100.0
LAR2
L #TEMP8
L C#8
*I
+AR2
TAR2 #TEMP10 # REG[Y]
TAR1 #POINTER
LAR1 #TEMP9 # REG[Y]
LAR2 #TEMP10 # REG[X]
L B [AR1,P#0.0]
L B [AR2,P#0.0]
==I
JCN M013
JU M014
M013: L P#DBX 0.0
LAR1
T #POINTER
L B#16#0
T #TEMP6
JU PRE_LOOPEND
M014: L #POINTER
LAR1
# Инкремент значения #CHECK_N
L #CHECK_N
L L#1
+I
T #CHECK_N
JU PRE_LOOPEND
PRE_LOOPEND: L #REG0
T MB 100
L #REG1
T MB 101
L #REG2
T MB 102
+AR1 P#1.0
L #TEMP6
+ 1
T #TEMP6
JU LOOPEND
OPCODE_OTHER: L P#DBX 0.0
LAR1
L 0
T #TEMP6
TAR1 #POINTER
LOOPEND: TAR1 #POINTER
CLR
= #TEMP16
L #CHECK_N
L L#20
==I
S #TEMP16
L #COUNTER_N
==I
A #TEMP16
# Все проверки пройдены, если #CHECK_N == #COUNTER_N == 20
JC GOOD
L #CHECK_N
L L#20
<I
S #TEMP16
L #COUNTER_N
==I
A #TEMP16
JC FAIL
JU M019
GOOD: SET
= #PRE_RET_VAL
JU FINISH
FAIL: CLR
= #PRE_RET_VAL
JU FINISH
M019: CLR
O #PRE_RET_VAL
= #RET_VAL
JU LOOP
FINISH: CLR
O #PRE_RET_VAL
= #RET_VALПолучив представление об инструкциях виртуальной машины, напишем небольшой дизассемблер для разбора байт-кода в блоке DB100:
import string
alph = string.ascii_letters + string.digits
with open('DB100.bin', 'rb') as f:
m = f.read()
pc = 0
while pc < len(m):
op = m[pc]
if op == 1:
print('R{} = DB101[{}]'.format(m[pc + 2], m[pc + 1]))
pc += 3
elif op == 2:
c = chr(m[pc + 1])
c = c if c in alph else '?'
print('R{} = {:02x} ({})'.format(m[pc + 2], m[pc + 1], c))
pc += 3
elif op == 4:
print('R0 = 0; R{} = (R{} == R{})'.format(
m[pc + 1], m[pc + 1], m[pc + 2]))
pc += 3
elif op == 5:
print('R0 = 0; R{} = R{} - R{}'.format(
m[pc + 1], m[pc + 1], m[pc + 2]))
pc += 3
elif op == 6:
print('CHECK (R{} == R{})n'.format(
m[pc + 1], m[pc + 2]))
pc += 3
else:
print('unk opcode {}'.format(op))
breakВ результате получим следующий код виртуальной машины:
Код виртуальной машины
R1 = DB101[0]
R2 = 6e (n)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[1]
R2 = 10 (?)
R0 = 0; R1 = R1 - R2
R2 = 20 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[2]
R2 = 77 (w)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[3]
R2 = 0a (?)
R0 = 0; R1 = R1 - R2
R2 = 16 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[4]
R2 = 75 (u)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[5]
R2 = 0a (?)
R0 = 0; R1 = R1 - R2
R2 = 16 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[6]
R2 = 34 (4)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[7]
R2 = 26 (?)
R0 = 0; R1 = R1 - R2
R2 = 4c (L)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[8]
R2 = 33 (3)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[9]
R2 = 0a (?)
R0 = 0; R1 = R1 - R2
R2 = 16 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[10]
R2 = 37 (7)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[11]
R2 = 22 (?)
R0 = 0; R1 = R1 - R2
R2 = 46 (F)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[12]
R2 = 33 (3)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[13]
R2 = 0a (?)
R0 = 0; R1 = R1 - R2
R2 = 16 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[14]
R2 = 6d (m)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[15]
R2 = 11 (?)
R0 = 0; R1 = R1 - R2
R2 = 23 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[16]
R2 = 35 (5)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[17]
R2 = 12 (?)
R0 = 0; R1 = R1 - R2
R2 = 25 (?)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)
R1 = DB101[18]
R2 = 33 (3)
R0 = 0; R1 = (R1 == R2)
CHECK (R1 == R0)
R1 = DB101[19]
R2 = 26 (?)
R0 = 0; R1 = R1 - R2
R2 = 4c (L)
R0 = 0; R1 = R1 - R2
CHECK (R1 == R0)Как видно, данная программа просто проверяет каждый символ из DB101 на равенство определенному значению. Итоговая строка для прохождения всех проверок: n0w u 4r3 7h3 m4573r. Если данную строку поместить в блок DB101, то активируется ручное управление ПЛК и можно будет взорвать или сдуть воздушный шар.
Вот и все! Алексей продемонстрировал высокий уровень знаний, достойный индустриального ниндзя 🙂 Победителю мы отправили памятные призы. Большое спасибо всем участникам!
Allikas: habr.com
