

Lisaks tcp/ip-le on palju teisi võimalusi aja sünkroniseerimiseks. Mõned neist vajavad vaid tavalist telefoni, samas kui teised nõuavad kallist, haruldast ja tundlikku elektroonilist varustust. Ajasünkroonimise süsteemide ulatuslik infrastruktuur hõlmab observatooriume, riiklikke institute, raadiojaamu, satelliitgruppide ja palju muud.
Täna räägin, kuidas toimub aja sünkroniseerimine ilma internetita ning kuidas valmistada ise „satelliit“ NTP-server.
Lühilaine raadioteenus
Ameerika Ühendriikides edastab NIST täpset aega ja sagedust 2,5, 5, 10, 15 ja 20 MHz raadiolaineid mööda WWVH jaamast Fort Collinsis, Colorado osariigis, ja sagedustel 2,5, 5, 10 ja 15 MHz WWVH jaamast Kauais, Hawaii osariigis. Ajakood edastatakse 60-sekundiliste intervallidega 1 b/s kiirusel, kasutades laiusajalis-düstroopi modulaatorit kande sagedusel 100 Hz.
Kanada Rahvuslik Teadusnõukogu (NRC) edastab ajutist ja sagedusinfo 3.33, 7.85 ja 14.67 MHz sagedustelt jaamast CHU Ottawas, Ontario provintsis.

WWVH edastamisformaat
Lühilainejaamade signaali edastamine toimub tavaliselt ionosfääri ülemiste kihtide peegelduse kaudu. Signaaliedastusi saab vastu võtta suurelt kauguselt, kuid täpsus on umbes üks millisekund.
Praegune NTPv4 standard sisaldab audio draivereid WWV, WWVH ja CHU jaoks.
Pika laine edastamine
NIST edastab ka täpset aega ja sagedust pikkadel raadiolaine sagedusel 60 kHz Boulderis, Colorado osariigis. On ka teisi täpset aega edastavaid jaamu pikkadel lainepikkustel.
Kutsevedajad ja asukoht
Sagedus (kHz)
Võimsus (kW)
WWVB Fort Collins, Colorado, USA
60
50
DCF77 Mainflingen, Saksamaa
77.5
30
MSF Rugby, Suurbritannia
60>
50
HBG Prangins, Šveits
75
20
JJY Fukushima, Jaapan
40
50
JJY Saga, Jaapan
60
50
Madalsageduslikud Aja Standardjaamad
Aja kood edastatakse 60-sekundilise intervalli jooksul kiirusel 1 b/s, sama nagu lühilainejaamades. Andmeedastusformaat on mõlema standardi puhul sarnane. Signaali levik toimub ioonsfääri madalamates kihtides, mis on suhteliselt stabiilsed ja mille päevaste kõrguse kõikumiste prognoosimine on võimalik. Tänu keskkonna füüsikalise prognoositavuse abil tõuseb täpsus 50 μs-ni.

WWVB edastusformaat
Geostatsionaarne keskkonna jälgimise satelliit
USA-s edastab NIST täpset aega ja sagedust ligikaudu 468 MHz-l geostatsionaarsetest keskkonna jälgimise satelliitidest (GOES). Ajakood vaheldub sõnumitega, mida kasutatakse kaugetelt anduritelt küsitlemiseks. See koosneb 60 BCD poolbaytist, mis edastatakse 30-sekundiliste intervallidega. Ajakoodi teave on sarnane maapealsetele teenustele.
Globaalsete positsioneerimissüsteemide süsteemid
Ameerika Ühendriikide kaitseministeerium kasutab GPS-i täpsete navigatsioonivõimetena maapinnal, merel ja õhus. See süsteem tagab ülemaailmse katvuse 24 tunni jooksul, kasutades 12-tunniseid orbiite madalal 55° nurgal asuvate satelliitide rühmade abil.
Algne 24 satelliidiga rühm on laiendatud 31 satelliidini ebaühtlases konfiguratsioonis, et vähemalt 6 satelliiti oleks alati nähtaval, ning 8 või enam satelliiti oleks nähtaval suuremal osal Maast.
GPS-sarnased teenused on või plaanitakse kasutada ka teistes riikides. Venemaa GLONASS on töötanud juba üle kümne aasta, arvestades 2. septembrit 2010, mil satelliitide koguarv tõusis 26-ni - rühm on täielikult juurutatud, et katta kogu Maa.

GPS-satelliidid maapinna ümber.
Euroopa Liidu satelliitnavigatsioonisüsteem kannab nime 'Galileo'. Oodati, et 'Galileo' hakkab tööle aastatel 2014—2016, kui orbiidile viiakse kõik 30 planeeritud satelliiti. Kuid 2018. aastaks ei olnud 'Galileo' satelliitide rühm veel vajalikku arvu seadmeid saavutanud.
Samuti on olemas Hiina «Beidou», mis tõlkes tähendab «korral». 16 satelliidist koosnev rühm alustas kaubanduslikku kasutust 27. detsembril 2012 regionaalse positsioneerimissüsteemina. Plaan on, et süsteem jõuab täispotentsiaali 2020. aastaks. Just täna ilmus Habras , teadet selle süsteemi satelliidi eduka lennu kohta.
Koordinaatide määramise matemaatika SRSN-i kaudu
Kuidas määrab teie nutitelefonis GPS/Glonass navigaator oma asukoha nii suure täpsusega raadiotehnika süsteemi (SRSN) abil? Arvutuspõhimõtte mõistmiseks tuleb meenutada stereomeetria ja algebra aluseid keskhariduse kõrgemates klassides või füüsikamatemaatika koolis.
Iga satelliit edastab vastuvõtjale täpse aja. Satelliidil on paigaldatud aatomikellad, seega saab neile usaldada. Teades valguse kiirus, ei ole keeruline määrata sfääri raadiust, mille pinnal satelliit asub. See on sama sfäär, mis puudutab maapinda ja moodustab ringi, kus GPS/Glonass vastuvõtja asub.
Kui signaal tuleb kahest satelliidist, on meil juba maapinna ja kahe sfääri ristumise punkt, mis annab vaid kaks punkti ringil. Kolmanda satelliidi sfäär peaks ideaaljuhul sattuma ühe neist kahest punktist, määrates lõplikult vastuvõtja koordinaadid.
Põhimõtteliselt võib isegi kahe satelliidi abil kaudsete märkide põhjal aru saada, milline neist kahest punktist on tõele lähemal, ning tänapäevased navigatsioonitarkvara algoritmid saavad sellise ülesandega hakkama. Miks on siis vajalik neljas satelliit?
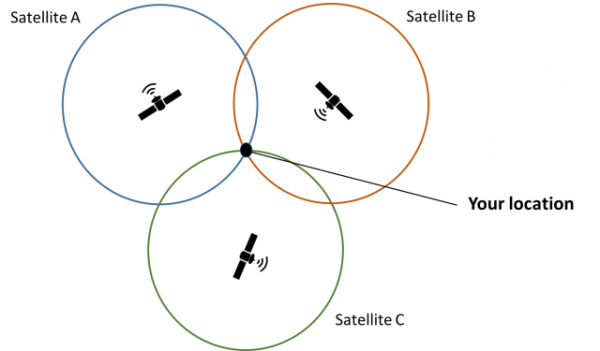
Asukoha määramine satelliitide gruppide abil.
Ei ole raske märgata, et selles idealiseeritud pildis on palju nüansse, mis mõjutavad arvutuste täpsust. Vastuvõtja kellaaeg on ehk kõige ilmselgem veaallikas. Selleks, et kõik töötaks nagu peab, peavad GPS/GLONASS vastuvõtja kellad olema sünkroniseeritud satelliidi ajaga. Ilma selleta oleks viga ± 100 tuhat km.
Kiirus, aeg ja vahemaa valemist S = v*t saame signaali edastamise algebrakäigu. Kaugus satelliidini on valguse kiirus korrutatud ajavahega satelliidi ja vastuvõtja vahel.

Peamiselt juhtub see seetõttu, et isegi pärast kõiki sünkroonimisi teame vastuvõtja aega tпр piisavalt täpselt. Tõelise aja ja tпр vahel on alati olemas Δt, mille tõttu muutub arvutuste viga vastuvõetamatuks. Seepärast on vajalik neljas satelliit.
Selgema matemaatilise põhjenduse saamiseks nelja satelliidi vajadusele koostame võrrandisüsteemi.

Nelja tundmatu x, y, z ja Δt määramiseks peab vaatlemiste arv olema vähemalt sama suur või suurem kui tundmatute arv. See on vajalik, kuid ebapiisav tingimus. Kui normaalvõrrandite maatriks osutub degeneratiivseks, ei ole võrrandisüsteemil lahendust.
Samuti ei tohi unustada Spetsiifilist Relatiivsusteooriat ja relatiivsuse efekte ajakõveruse aeglase mõju osas satelliidi aatomikellade ja maapinnal asuvate seas.

Kui arvata, et satellite liigub orbiidil kiirusel 14 000 km/h, siis saame ajakulu aeglustamise umbes 7 μs (mikrosekundit). Teisalt mõjuvad üldrelatiivsuse efektid.
Asi on selline, et satelliidid orbiidil asuvad kaugel Maast, kus ruum-aja kõverus on väiksem kui maapinnal Maa massi tõttu. Vastavalt GR-le tunduvad kellad, mis asuvad massiivse objekti lähedal, käivat aeglasemalt kui need, mis asuvad sellest kaugemal.

- G — gravitatsioonikonstant;
- M — objekti mass, sel juhul Maa;
- r — kaugus Maa keskpunktist satelliidini;
- c — valguse kiirus.
Selle valemi kohaselt on aeglustumine satelliidil 45 μs. Seega -7μs +45μs = 38μs tasakaal — SRT ja GRT efektide vahel.
Rakendusülesannetes positsioneerimise määramisel GNSS-iga tuleb samuti arvesse võtta ionosfääri ja troposfääri viivitusi. Lisaks on 46 ns korrigeeringud seotud GPSi satelliitide orbiidi ekstsentrilisusega 0.02.
Võime saada signaale samal ajal rohkem kui neljast GPS / GLONASS satelliidist võimaldab veelgi suurendada vastuvõtja koordinaatide määramise täpsust. See saavutatakse selle kaudu, et navigator lahendab nelja tundmatuga nende nelja võrrandi süsteemi.  kordade arvu ja võtab keskmise väärtuse, suurendades lõplikku hinnangut vastavalt matemaatika statistika seadustele.
kordade arvu ja võtab keskmise väärtuse, suurendades lõplikku hinnangut vastavalt matemaatika statistika seadustele.
Kuidas seadistada Stratum 1 NTP server satelliidiühenduse kaudu
Kvaliteetse ajaserveri seadistamiseks on vajalik ainult GPSD, NTP ja GPS-vastuvõtja, millel on 1PPS väljund (üks impuls sekundis).
1. Paigaldage gpsd ja ntpd või gpsd ja chronyd. Gpsd versioon peab olema ≥ 3.20
(1:1109)$ sudo emerge -av gpsd chrony
Kohalik koopia kaugindeksi on ajakohane ja seda hakatakse kasutama.
Sõltuvuste arvutamine... tehtud!
[binary N ] net-misc/pps-tools-0.0.20120407::gentoo 31 KiB
[binary N ] net-misc/chrony-3.5-r2::gentoo USE="adns caps cmdmon ipv6 ntp phc readline refclock rtc seccomp (-html) -libedit -pps (-selinux)" 246 KiB
[binary N ] sci-geosciences/gpsd-3.17-r3:0/23::gentoo USE="X bluetooth cxx dbus ipv6 ncurses python shm sockets udev usb -debug -latency-timing -ntp -qt5 -static -test" GPSD_PROTOCOLS="aivdm ashtech earthmate evermore fv18 garmin garmintxt gpsclock isync itrax mtk3301 navcom ntrip oceanserver oncore rtcm104v2 rtcm104v3 sirf skytraq superstar2 tnt tripmate tsip ublox -fury -geostar -nmea0183 -nmea2000 -passthrough" PYTHON_TARGETS="python2_7" 999 KiB
Kokku: 3 paketti (3 uut, 3 binaarset), allalaadimise suurus: 1275 KiB
Kas soovite neid pakette ühendada? [Jah/ei]2. Ühendage PPS tugi GPS vastuvõtja RS232 või USB sadamaga.
Tavaline odav GPS vastuvõtja ei sobi; võib-olla peate natuke ringi käima, et leida sobiv.
3. Veenduge, et seade tõepoolest genereerib PPS-i, selleks kontrollige porti utiliidiga gpsmon.
4. Avage fail /etc/conf.d/gpsd ja muutke järgmist rida.
Asendage
GPSD_OPTIONS=""nii, et see oleks
GPSD_OPTIONS="-n"See muudatus on vajalik selleks, et gpsd käivitamisel alustaks kohe SRNS-i allikate otsimist.
5. Käivitage või taaskäivitage gpsd.
(1:110)$ sudo /etc/init.d/gpsd start
(1:111)$ sudo /etc/init.d/gpsd restart
Systemd-iga jaotiste jaoks kasutage vastavat systemctl käsku.
6. Kontrollige käskude cgps konsooli väljundit.
On oluline veenduda, et andmed tulevad satelliitidelt õigesti. Konsoolis peaks olema midagi sarnast kujutisele.
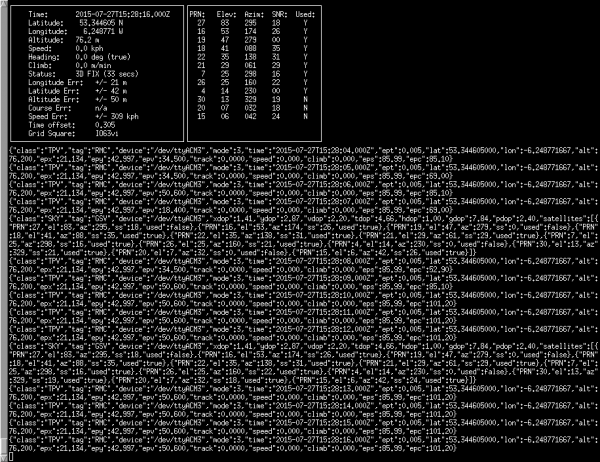
Käskude cgps konsooli väljund.
7. On aeg redigeerida faili /etc/ntp.conf.
# GPS Serial data reference (NTP0)
server 127.127.28.0
fudge 127.127.28.0 time1 0.9999 refid GPS
# GPS PPS reference (NTP1)
server 127.127.28.1 prefer
fudge 127.127.28.1 refid PPS
Ülemine NTP0 kirje osutab universaalsele ajallikmele, mis on saadaval peaaegu kõikidel GPS-seadmetel. Alumine NTP1 kirje määratleb palju täpsema PPS ajallikme.
8. Taaskäivita ntpd.
(1:112)$ sudo /etc/init.d/ntpd restart Systemd-iga jaotiste puhul kasutage käsku systemctl.
$ sudo systemctl restart ntp
Kasutatud materjalid
- David L Mills, Võrguaeg Protokoll Maal ja Kosmoses, Teine väljaanne.
Allikas: habr.com
