

Täna alustame ruuteritest õppimisega. Kui olete läbinud minu videokursuse esimesest kuni 17. õpikuni, siis olete juba õppinud lülitite aluseid. Nüüd liigume järgmise seadme juurde – ruuteri juurde. Nagu te eelmisest videost teate, on üks CCNA kursuse teema just see – Cisco lülitamine ja marsruutimine.
Selles sarjas me ei hakka Cisco ruutereid uurima, vaid käsitleme marsruutimise kontseptsiooni üldiselt. Meil on kolm teemat. Esimene on ülevaade sellest, mida te juba ruuteritest teate, ja vestlus selle üle, kuidas seda saab kasutada koos teie lülitite õppimise käigus omandatud teadmistega. Peame aru saama, kuidas lülitite ja ruuterite koostöö käib.
Seejärel vaatame, mis on marsruutimine, mida see tähendab ja kuidas see töötab, ning liigume edasi marsruutimisprotokollide tüüpide juurde. Täna kasutan topoloogiat, mida olete juba varasemates õnedes näinud.
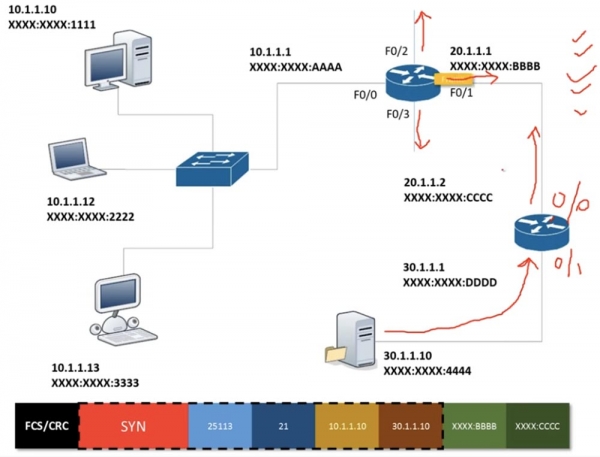
Me oleme vaadanud, kuidas andmed liiguvad üle võrgu ja kuidas toimub TCP kolmepoolne käepigistus. Esimene sõnum, mis saadetakse võrku, on SYN-pakett. Vaadakem, kuidas toimub kolmepoolne käepigistus, kui arvuti IP-aadressiga 10.1.1.10 soovib ühendust luua serveriga 30.1.1.10, st püüab luua FTP-ühendust.
Ühenduse alustamiseks loob arvuti juhusliku allika pordi numbriga 25113. Kui te unustasite, kuidas see toimub, soovitan vaadata üle varasemad videod, kus see teema käsitlemine toimus.
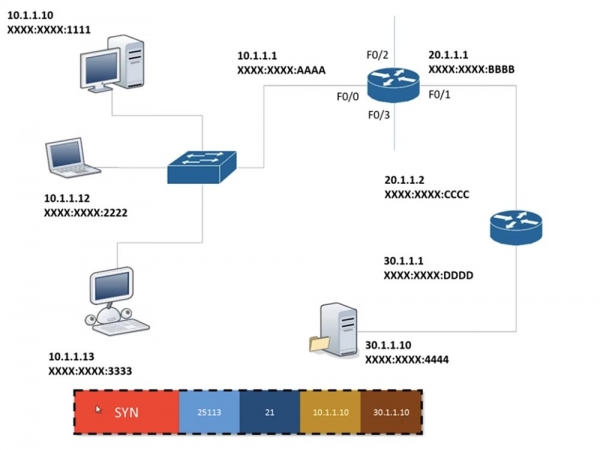
Seejärel sisestab ta sihtpordi numbri raamisse, kuna teab, et peab ühenduma pordiga 21, ning seejärel lisab kolmanda taseme OSI teabe, st oma IP-aadressi ja sihtkoha IP-aadressi. Katkised andmed ei muutu, kuni nad jõuavad sihtpunkti. Kui nad jõuavad serverisse, ei muutu nad ka, kuid server lisab raami teise taseme teabe, st MAC-aadressi. See on tingitud sellest, et lülitid tunnevad ainult teise taseme OSI teavet. Selles stsenaariumis on ruuter ainus võrguseade, mis käsitleb kolmanda taseme teavet, loomulikult töötleb ka arvuti seda teavet. Seega töötab lüliti ainult teise taseme teabe alusel, samas kui ruuter töötleb kolmanda taseme teavet.
Lüliti tunneb lähte MAC-aadressi XXXX:XXXX:1111 ja tahab teada serveri MAC-aadressi, mille poole arvuti pöördub. Ta võrdleb lähte IP-aadressi sihtadressiga, mõistab, et need seadmed asuvad erinevates alamvõrkudes, ja otsustab kasutada pääsupunkti teise alamvõrgu jõudmiseks.
Küsimus, kes määrab, milline IP-aadress peaks olema värava aadress, tuleb sageli ette. Esiteks otsustab selle võrguadministraator, kes loob võrgustiku ja määrab igale seadmele IP-aadressi. Administratorina saate ruuterile määrata mis tahes aadressi, mis kuulub teie alamvõrgu lubatud aadresside vahemikku. Tavaliselt on see esimene või viimane lubatud aadress, kuid seadmine ei pruugi järgida rangeid reegleid. Meie juhul määras administraator värava ehk ruuteri aadressiks 10.1.1.1 ja määras selle sadamaks F0/0.
Kui seadistate võrku arvutis staatilise IP-aadressiga 10.1.1.10, siis määrate alamvõrgu maskiks 255.255.255.0 ja vaikeväravaks 10.1.1.1. Kui te ei kasuta staatilist aadressi, siis kasutab arvuti DHCP, mis määrab dünaamilise aadressi. Ükskõik, kas arvuti kasutab staatilist või dünaamilist IP-aadressi, peab teisesse võrku pääsemiseks olema olemas värava aadress.
Seega, arvuti 10.1.1.10 teab, et peab saatma raamid ruuterile 10.1.1.1. See edastus toimub kohaliku võrgu sees, kus IP-aadressil ei ole tähtsust, oluline on ainult MAC-aadress. Oletame, et arvuti ei ole varem ruuteriga ühendust võtnud ja ei tea tema MAC-aadressi, seega peab ta esmalt saatma ARP-päringu, millega küsib kõigi alavõrgu seadmete käest: "Hei, kes teist omab aadressi 10.1.1.1? Palun teatage mulle oma MAC-aadress!". Kuna ARP on laiaulatuslik sõnum, jõuab see kõikide seadmete, sealhulgas ruuteri, portide juurde.
Arvuti 10.1.1.12, saades ARP-i, mõtleb: "Ei, minu aadress ei ole 10.1.1.1" ja viskab päringu kõrvale, sama teeb ka arvuti 10.1.1.13. Ruuter, saades päringu, mõistab, et küsitakse just temalt, ja saadab tagasi MAC-aadressi port F0/0 – kuna kõigil portidel on erinev MAC-aadress – arvutile 10.1.1.10. Nüüd, teades sihtmärgi aadressi XXXX:AAAA, lisab arvuti selle raami lõppu, mis on suunatud serverile. Koos sellega seadis ta raami päise FCS/CRC, mis on edastamise vigade kontrollimise mehhanism.
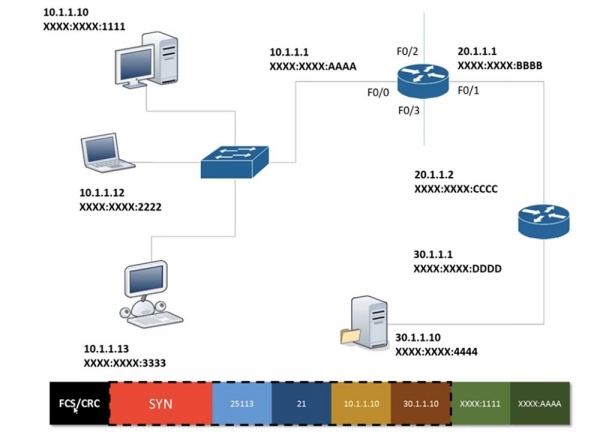
Pärast seda saadetakse arvuti raam 10.1.1.10 kaudu juhtmete kaudu ruuterisse 10.1.1.1. Pärast raami vastuvõtmist eemaldab ruuter FCS/CRC, kasutades kontrollimiseks sama algoritmi, mis on arvutis. Andmed koosnevad lihtsalt nullidest ja ühtedest. Kui andmed on kahjustatud, st 1 muutub 0-ks või 0 muutub 1-ks, või andmete lekkimine toimub, mis sageli juhtub hub'i kasutamise korral, peab seade raami uuesti edastama.
Kui FCS/CRC kontroll on edukas, vaatab ruuter allika ja sihtkoha MAC-aadresse ning eemaldab need, kuna see on 2. taseme teave, ja liigub edasi raamile sisule, mis sisaldab 3. taseme teavet. Sellest saab ta teada, et raam sisaldab informatsiooni seadmest, mille IP-aadress on 30.1.1.10.
Ruuter teab mingil viisil, kus see seade asub. Me ei arutanud seda küsimust, kui vaatasime lülitite tööd, seega vaatame seda nüüd. Ruuteril on 4 porti, seega lisasin sellele veel mõned ühendused. Nii et kust ruuter teab, et andmed seadme IP-aadressiga 30.1.1.10 tuleb saata porti F0/1? Miks ta ei saada neid porti F0/3 või F0/2?
Asi on selles, et ruuter töötab marsruutimistabeliga. Igal ruuteril on selline tabel, mis võimaldab otsustada, millise pordi kaudu konkreetne raam edastada.
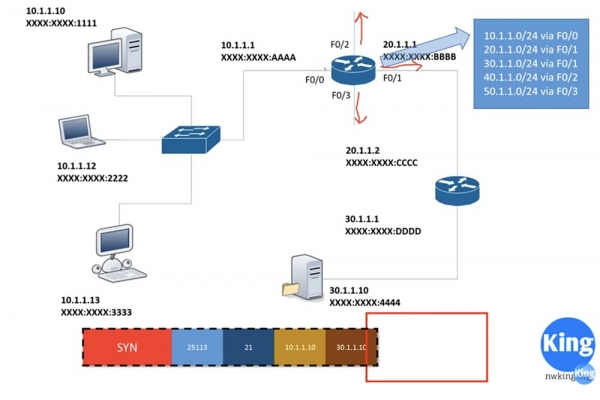
Käesoleval juhul on port F0/0 seadistatud IP-aadressile 10.1.1.1, mis tähendab, et see on ühendatud võrku 10.1.1.10/24. Samamoodi on port F0/1 seadistatud aadressile 20.1.1.1, st ühendatud võrku 20.1.1.0/24. Ruuter tunneb neid kahte võrku, kuna need on otseselt ühendatud tema portidega. Niisiis, teave selle kohta, et liiklus võrku 10.1.1.0/24 peab läbi minema porti F0/0 ja võrku 20.1.1.0/24 – läbi porti F0/1, on teada vaikimisi. Kuidas aga ruuter teab, milliste portidega töötada teiste võrkudega?
Me näeme, et võrk 40.1.1.0/24 on ühendatud pordi F0/2, võrk 50.1.1.0/24 – pordi F0/3, ja võrk 30.1.1.0/24 ühendab teist ruuterit serveriga. Teisel ruuteril on samuti marsruutimistabel, kus on kirjas, et võrk 30 on ühendatud tema pordiga, tähistame seda 0/1, ja esimesega on ta ühendatud pordi 0/0 kaudu. See ruuter teab, et tema port 0/0 on ühendatud võrguga 20, ja port 0/1 on ühendatud võrguga 30, kuid ei tea enam midagi.
Sarnaselt teab esimene ruuter võrkudest 40. ja 50., mis on ühendatud portidega 0/2 ja 0/3, kuid ei tea midagi võrgust 30. Marsruudiprotokoll pakub ruuteritele teavet, mida nad ei oma vaikimisi. Mehhanism, mille kaudu need ruuterid omavahel suhtlevad, on marsruutimise alus, kusjuures on olemas nii dünaamiline kui ka staatiline marsruutimine.
Staaticne marsruutimine tähendab, et esimesele ruuterile antakse teave: kui tuleb suhelda võrgu 30.1.1.0/24, tuleb kasutada porti F0/1. Kui aga teisele ruuterile tuleb liiklus serverilt, mis on mõeldud arvutile 10.1.1.10, ei tea ta, mida sellega teha, sest tema marsruutimistabelis on ainult teave võrgu 30. ja 20. kohta. Seetõttu peab ka sellele ruuterile seadma staatilise marsruutimise: kui ta saab liiklust võrgu 10. kohta, peab ta selle saatma läbi pordi 0/0.
Staatilise marsruutimise probleem on see, et ma pean käsitsi seadistama esimese ruuteri töötama võrgu 30. ja teise ruuteri töötama võrgu 10. juures. See on lihtne, kui mul on ainult 2 ruuterit, kuid kui mul on 10 ruuterit, võtab staatilise marsruutimise seadistamine palju aega. Sellisel juhul on mõistlik kasutada dünaamilist marsruutimist.
Nii et, saades raamilt andmed arvutilt, vaatab esimene ruuter oma marsruutimistabelisse ja otsustab saata selle läbi porti F0/1. Samuti lisab ta raami allika MAC-aadressi XXXX.BBBB ja sihtkohtade MAC-aadressi XXXX.CCCC.
Saades seda raamistikku, teine marsruuter "lõikab" MAC-aadresse, mis kuuluvad teise astme OSI-le, ja liigub edasi kolmanda tasandi teabe juurde. Ta näeb, et siht-IP-aadress 30.1.1.10 kuulub sama võrku kui marsruuteri port 0/1, lisab raami allika MAC-aadresse ja sihtseadmise MAC-aadresse ning saadab raami serverile.
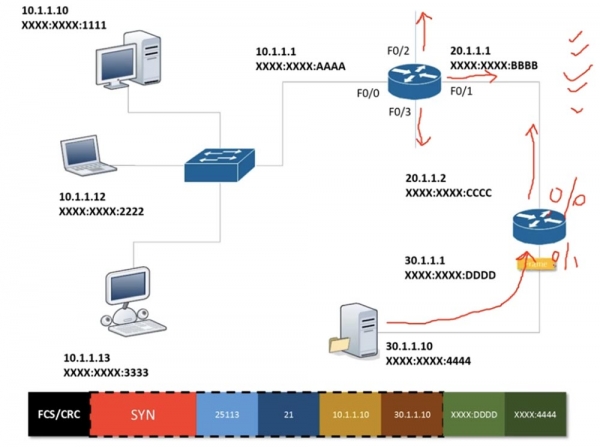
Nagu ma juba ütlesin, kordub sarnane protsess vastupidises suunas, st teostatakse teine käepigistuse etapp, mille käigus server saadab tagasi SYN ACK-sõnumi. Enne seda lõpetab ta kogu liigse teabe ja jätab alles ainult SYN-paketi.

Saades selle paketi, vaatab teine marsruuter saadud teavet, täiendab seda ja saadab edasi.
Nii et, varasemates tundides õppisime, kuidas lülitid töötavad, ja nüüd saame teada, kuidas ruuterid toimivad. Vaatame, mida kujutab endast marsruutimine globaalsetes mõistes. Kujutame ette, et olete sattunud sellise liiklusmärgi juurde, mis on paigaldatud ringristmikule. Näete, et esimene väljapääs viib Fairfaxi kuninglike õhujõudude baasi, teine lennujaama, kolmas lõuna poole. Kui valite neljanda väljapääsu, siis satute ummikusse ning viienda kaudu saate sõita linna keskusesse Brexby lossi juurde.
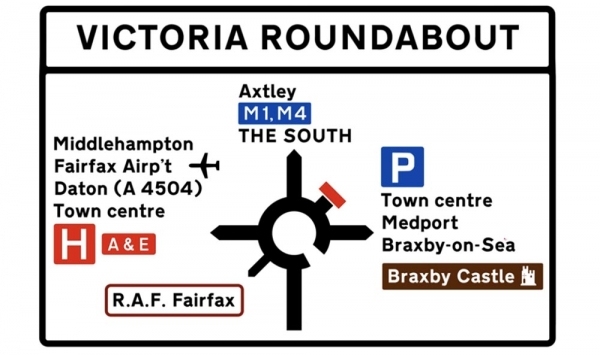
Kokkuvõttes on marsruutimine see, mis paneb ruuteri otsustama, kuhu liiklust suunata. Antud juhul peate teie, kui juht, otsustama, millist väljapääsu ringristmikult kasutada. Võrkudes peavad ruuterid otsustama, kuhu saata pakette või raame. Te peate mõistma, et marsruutimine võimaldab luua tabeleid, mille alusel ruuterid neid otsuseid teevad.
Nagu ma ütlesin, on olemas staatiline ja dünaamiline marsruutimine. Vaatleme staatilist marsruutimist, mille jaoks joonistan kolm seadet, mis on omavahel ühendatud, kusjuures esimene ja kolmas seade on ühendatud võrkudega. Oletame, et üks võrk 10.1.1.0 soovib luua ühenduse võrguga 40.1.1.0, samal ajal kui ruuterite vahel on võrgud 20.1.1.0 ja 30.1.1.0.
Sellisel juhul peavad ruuterite pordid kuuluma erinevatesse alamvõrkudesse. Ruuter 1 teab vaikimisi ainult võrkudest 10. ja 20. ning ei tea midagi ülejäänud võrkudest. Ruuter 2 tunneb ainult võrgud 20. ja 30., kuna need on temaga ühendatud, ja ruuter 3 tunneb ainult võrgud 30. ja 40. Kui võrk 10. soovib luua ühenduse võrguga 40., pean ma rääkima ruuterile 1 võrgust 30. ja sellest, et kui ta soovib edastada raami võrgule 40., peab ta kasutama liidest võrgule 20. ja saatma raami selle sama võrgu 20 kaudu.
Teisele ruuterile pean määrama kaks marsruuti: kui ta soovib edastada paketti võrgust 40. võrgus 10., peab ta kasutama pouti võrgule 20., ja paketi edastamiseks võrgust 10. võrku 40. – peab ta kasutama pouti võrgule 30. Sarnaselt pean ma varustama ruuteri 3 teabega võrkudest 10. ja 20.
Kuidas jälgida väikeseid võrke, on staatilise marsruutimise seadistamine väga lihtne. Kuid võrgu kasvades tekivad järjest rohkem probleemid staatilise marsruutimisega. Oletame, et olete loonud uue ühenduse, mis seob esimest ja kolmandat ruuterit. Sellisel juhul uuendab dünaamilise marsruutimise protokoll automaatselt ruuteri 1 marsruuditabelit, öeldes: "kui peate ühendust võtma ruuteriga 3, kasutage otsest marsruuti"!
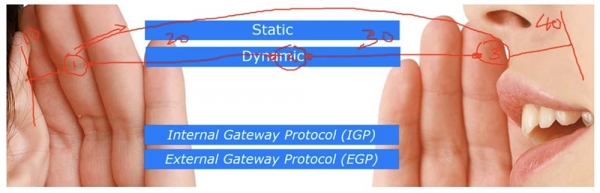
On olemas kahte tüüpi marsruutimisprotokolle: sisemise värava protokoll IGP ja välise värava protokoll EGP. Esimene protokoll töötab eraldi, autonoomse süsteemi, tuntud kui marsruudidomeeniga. Oletame, et teil on väike organisatsioon, kus on vaid 5 ruuterit. Kui räägime ainult nende ruuterite vahelisest suhtlemisest, siis mõtleme IGP-le; kui aga kasutate oma võrku internetiga ühendamiseks, nagu teevad internetiteenuse pakkujad, siis kasutate EGP-d.

IGP kasutab kolme populaarset protokolli: RIP, OSPF ja EIGRP. CCNA õppekava mainib ainult kahte viimast protokolli, kuna RIP on ajale jalgu jäänud. See on lihtsaim marsruutimisprotokoll, mida kasutatakse endiselt mõningatel juhtudel, kuid see ei taga vajalikku võrgu turvalisust. See on üks põhjusi, miks Cisco jättis RIP välja õppekursusest. Sellegipoolest räägin ma sellest, kuna selle õppimine aitab mõista marsruutimise aluseid.

EGP protokollide klassifikatsioon kasutab kaht protokolli: BGP ja EGP protokolli ise. CCNA kursuse raames vaatame me ainult BGP, OSPF ja EIGRP. Rääkides RIP-ist, võite seda pidada boonusteabe osaks, mis kajastub ühes videotunnis.
On veel kahe tüüpi marsruutimisprotokolle: kaugusvektorprotokollid (Distance Vector) ja kanaliseisundiprotokollid (Link State).
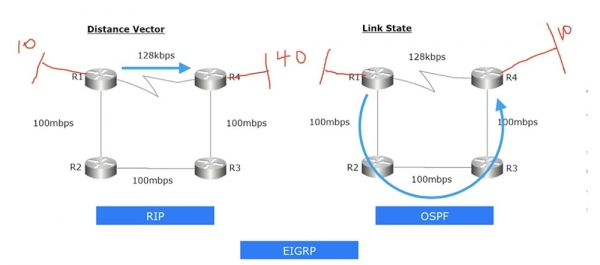
Esimene punkt käsitleb kauguse ja suuna vektoreid. Näiteks võin luua otseühenduse ruuteri R1 ja R4 vahel või teha ühenduse läbi R1-R2-R3-R4. Kui räägime marsruutimisprotokollidest, mis kasutavad kaugus-vektori meetodit, toimub ühendus alati lühima marsruudi kaudu. Sel juhul ei oma tähtsust, et see ühendus omab madalat kiirusetaset. Meie jaoks on see 128 kbit/s, mis on oluliselt aeglasem kui ühendus marsruudil R1-R2-R3-R4, kus kiirus on 100 Mbit/s.
Vaatame kaugusvektorprotokolli RIP. Joonistan enne ruuteri R1 võrgu 10. ja ruuteri R4 taha võrgu 40. Oletame, et nende võrkude sees on palju arvuteid. Kui ma tahan luua ühenduse võrgu 10. R1 ja võrgu 40. R4 vahel, siis seadistan R1 staatilise marsruutimise tüübi: "kui on vaja ühenduda võrgu 40. , kasuta otseühendust ruuteriga R4". Sel juhul pean kõigil neljal ruuteril käsitsi seadistama RIP-i. Siis R1 marsruuditabel teatab automaatselt, et kui võrk 10. soovib ühenduda võrguga 40., tuleb kasutada otseühendust R1-R4. Isegi kui möödasõit osutub kiiremaks, valib Distance Vector protokoll ikkagi kõige lühema marsruudi, millel on väikseim edastusvahemaa.
OSPF on kanaliriigi protokoll, mis jälgib pidevalt võrgusegmentide olekut. Antud juhul hindab see kanalite kiirus, ja kui see märkab, et R1-R4 kanali kaudu liikuvad andmed on väga madalad, valib see kiiruselt kõrgema tee R1-R2-R3-R4, isegi kui selle pikkus ületab lühema tee. Nii et kui ma seadistan OSPF protokolli kõikidesse ruuteritesse, suunatakse 40. võrgu ja 10. võrgu ühendamisel liiklus marsruudi R1-R2-R3-R4 kaudu. Seega on RIP kaugusvektorprotokoll ja OSPF on kanaliriigi marsruudiprotokoll.
On olemas veel üks protokoll – EIGRP, Cisco eraomandi marsruutimisprotokoll. Kui rääkida teiste tootjate, nagu Juniper, seadmetest, siis nad ei toeta EIGRP-d. See on suurepärane marsruutimisprotokoll, mis on palju tõhusam kui RIP ja OSPF, kuid seda saab kasutada ainult Cisco seadmetele põhinevates võrkudes. Hiljem räägin lähemalt, mis teeb selle protokolli nii heaks. Praegu mainin, et EIGRP ühendab endas kaugsuundprotokollide ja kanalite oleku marsruutimisprotokollide omadusi, olles hübriidne protokoll.
Järgmises videoõppes sukeldume sügavamale Cisco ruuterite temaatikasse, räägin natuke Cisco IOS operatsioonisüsteemist, mis on mõeldud nii lülititele kui ka ruuteritele. Loodan, et 19. või 20. päeva tundides alustame marsruutimisprotokollide põhjalikku uurimist, ja ma näitan väikeste võrkude näitel, kuidas seadistada Cisco ruutereid.
Aitäh, et olete meiega. Kas teile meeldivad meie artiklid? Soovite rohkem huvitavat sisu? Toetage meid tellimuse vormistamise või soovituste jagamisega sõpradele. 30% soodustus Habra kasutajatele meie ainulaadsetelt entry-level serveritelt, mis on loodud just teile: (saadaval on RAID1 ja RAID10 variandid, kuni 24 südamikku ja kuni 40GB DDR4).
Dell R730xd kaks korda odavam? Ainult meie juures Hollandi turul! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — alates $99! Lugege, kuidas
Allikas: habr.com
