

Tere, Habr. Ilmselt on igaühel, kes on kunagi saatnud või saatnud sugulasi või sõpru lennukisse, olnud võimalus kasutada tasuta teenust Flightradar24. See on väga mugav viis lennuki asukoha reaalajas jälgimiseks.
V oli kirjeldatud sellise veebiteenuse tööpõhimõtet. Nüüd liikume edasi ja selgitame välja, milliseid andmeid edastatakse ja võetakse vastu lennuki ja vastuvõtustatsiooni vahel ning dekodeerime need iseseisvalt Pythoniga.
Ajalugu
On ilmne, et lennukite andmeid edastatakse mitte selleks, et kasutajad näeksid neid oma nutitelefoni ekraanil. Süsteem nimega ADS–B (Automatic dependent surveillance—broadcast) teenib automaatset teabe edastamist lennuki kohta dispetšerkeskusesse — edastatakse selle identifikaator, koordinaadid, suund, kiirus, kõrgus ja muud andmed. Varem, enne selliste süsteemide tekkimist, nägi dispetšer ainult punkti radaril. Seda oli liiga vähe, kui lennukite arv suurenes liiga suureks.
Tehniliselt tähendab ADS-B seda, et lennuki peal on edastaja, mis perioodiliselt saadab pakette teavet piisavalt kõrgel sagedusel 1090 MHz (on ka teisi režiime, kuid need ei huvitavad meid nii väga, kuna koordinaate edastatakse ainult siin). Loomulikult on edastaja kõrval ka vastuvõtja kuskil lennujaamas, kuid meie kui kasutajate jaoks on huvitav meie enda vastuvõtja.
Muide, võrdluseks, esimene selline süsteem, Airnav Radarbox, mis oli mõeldud tavalistele kasutajatele, ilmus 2007. aastal ja maksis umbes 900 dollarit, veel umbes 250 dollarit maksis aastane tellimus võrgu teenustele.
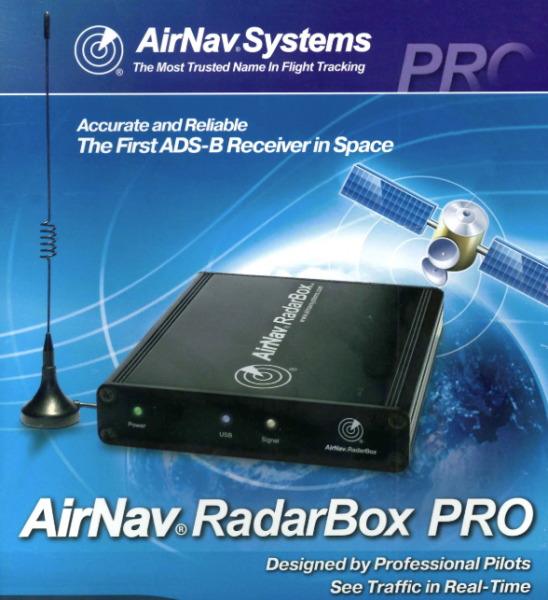
Neid varaseid vene omanike arvustusi saab lugeda foorumist . Praegu, kui RTL-SDR vastuvõtjad on laialdaselt kergesti kättesaadavad, saab sarnase seadme kokku panna 30 dollari eest, selle kohta oli rohkem teavet . Läheme nüüd protokolli juurde — vaatame, kuidas see töötab.
Signaalide vastuvõtt
Alustuseks on signaal vaja salvestada. Kogu signaal kestab vaid 120 mikrosekundit, seega on soovitav, et SDR-vastuvõtja oleks vähemalt 5 MHz näidussagedusega.
Pärast salvestamist saame WAV-faili, mille skaadi sagedus on 5000000 näidist/sekundis, 30 sekundi pikkune selline salvestus kaalub umbes 500 MB. Mängida seda meedia mängijaga on muidugi mõttetu — fail ei sisalda helisid, vaid otseselt digitaalset raadiolingid — just nii töötab Software Defined Radio.
Avame ja töötleme faili Pythoniga. Need, kes soovivad ise katsetada, võivad alla laadida näidisfaili. .
Laadime faili ja vaatame, mis sees on.
from scipy.io import wavfile
import matplotlib.pyplot as plt
import numpy as np
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
data = data.astype(float)
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
plt.plot(A)
plt.show()
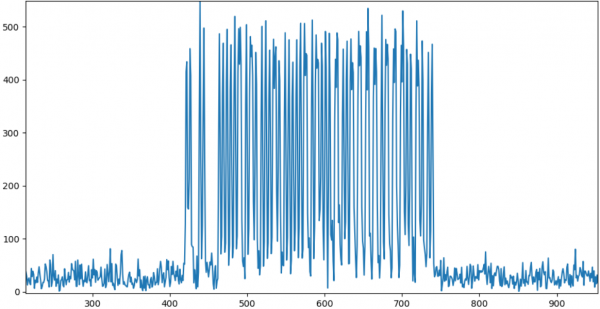
Tulemus: näeme selgeid 'impulsse' taustamüra seas.
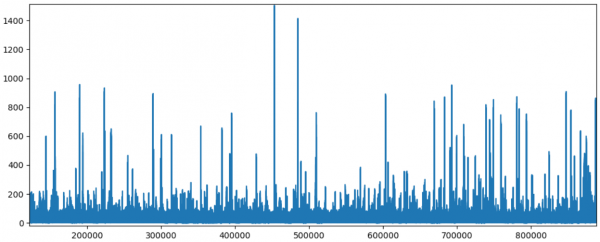
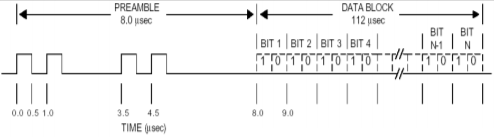
Iga 'impuls' ongi signaal, mille struktuur on hästi nähtav, kui suurendada graafiku eraldusvõimet.
Nagu näha, vastab pilt täiesti sellele, mis on eespool kirjeldatud. Võime andmete töötlemisega alustada.
Dekodeerimine
Alustuseks tuleb saada bitivool. Iga signaal on kodeeritud manchesteri kodeerimisega:

Taseme erinevuse põhjal on lihtne saada reaalsed '0' ja '1'.
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 avg2:
bits_str += "1"
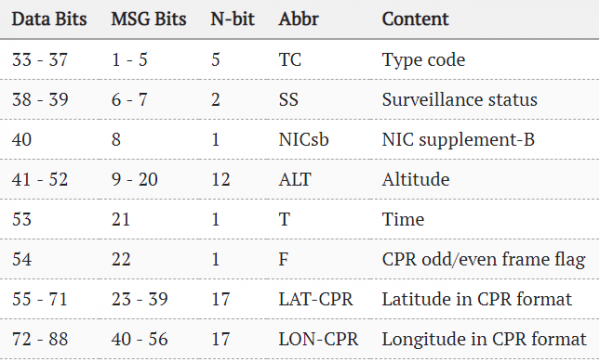
Signaali struktuur on järgmine:

Vaatame väljad lähemalt.
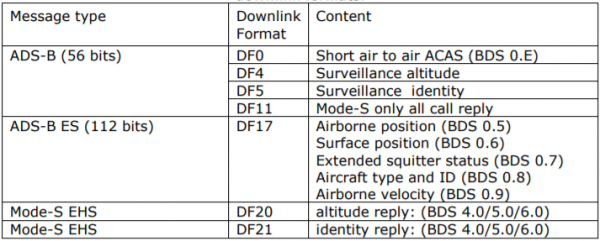
DF (Downlink Format, 5 bitti) — määrab sõnumi tüübi. Neid on mitu tüüpi:
()
Meid huvitab ainult tüüp DF17, kuna just see sisaldab õhusõiduki koordinaate.
ICAO (24 bitti) — rahvusvaheline ainulaadne õhusõiduki kood. Lennuki kontrollimiseks selle koodi järgi saab (kahjuks on autor andmebaasi uuendamise lõpetanud, kuid see on endiselt aktuaalne). Näiteks koodi 3c5ee2 kohta on meil järgmine teave:

Muudatus: on ICAO koodi kirjeldus esitatud põhjalikumalt, huvilistele soovitan tutvuda.
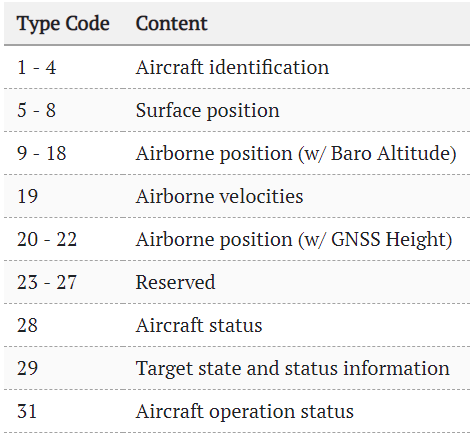
DATA (56 või 112 bitti) — tegelikult andmed, mida me dekodeerime. Esimesed 5 bitti andmetest — väli Type Code, mis sisaldab salvestatud andmete alamtüüpi (ära segad DF-ga). Selliseid tüüpe on üsna palju:
()
Vaatame mitu paketti näiteid.
Lennuki identifitseerimine
Näide binaarses vormis:
00100 011 000101 010111 000111 110111 110001 111000
Andmeväljad:
+------+------+------+------+------+------+------+------+------+------+
| TC,5 | EC,3 | C1,6 | C2,6 | C3,6 | C4,6 | C5,6 | C6,6 | C7,6 | C8,6 |
+------+------+------+------+------+------+------+------+------+------+
TC = 00100b = 4, iga sümbol C1-C8 sisaldab koode, mis vastavad indeksitele reas:
#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######
Dekodeerides rida, on lihtne saada lennuki kood: EWG7184
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Lennuki tuvastamine:", code_str.replace('#', ''))
Õhus viibimise asukoht
Kui nimetus on lihtne, siis koordinaatidega on keerulisem. Need edastatakse kahes, paarides ja paaritutes raamistikes. Välja koode TC = 01011b = 11.
Näide paarilisest ja paaritust paketist:
01011 000 000101110110 00 10111000111001000 10000110101111001
01011 000 000110010000 01 10010011110000110 10000011110001000
Koordinaatide arvutamine toimub üsna nutika valemi abil:
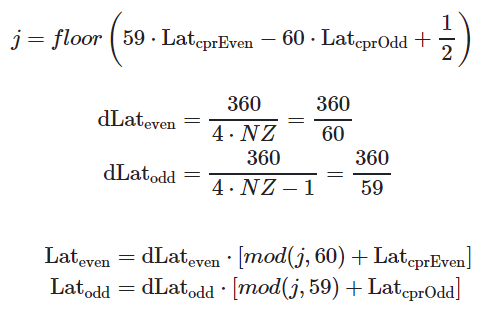
()
Ma ei ole GIS-i spetsialist, nii et kust see saadakse, ei tea. Kes teab, kirjutage kommentaaridesse.
Kõrgus on lihtsam arvutada — sõltuvalt kindlast bitist võib see esindada kas 25 või 100 jalaga.
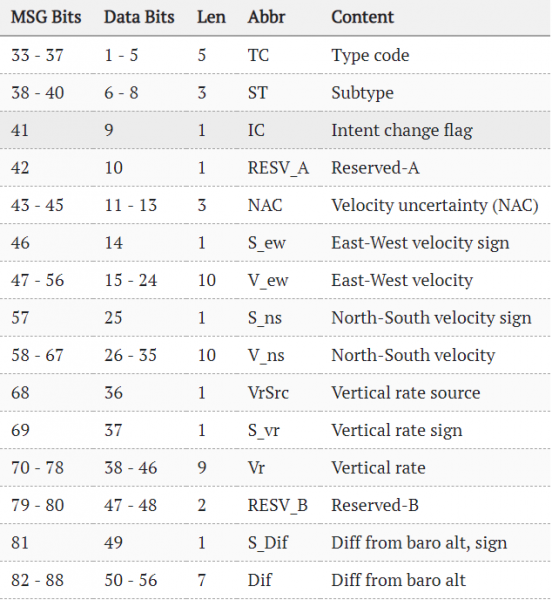
Õhus viibimise kiirus
Paketid TC=19. Siin on huvitav see, et kiirus võib olla kas täpne, maapinna suhtes (Ground Speed) või õhus, mida mõõdab lennuki andur (Airspeed). Edastatakse ka palju erinevaid välju:
()
Kokkuvõte
Nagu näha, on ADS-B tehnoloogia saanud huvitavaks sünteesiks, kus mõni standard on kasulik mitte ainult spetsialistidele, vaid ka tavakasutajatele. Loomulikult mängis siin üliolulist rolli digitaalsete SDR-vastuvõtjate tehnoloogia odavnemine, mis võimaldab seadmel sõna otseses mõttes „väikese raha eest” vastu võtta üle gigaheerti signaale.
Ise standardses on loomulikult palju rohkem. Huvi korral võivad soovijad vaadata PDF-i lehelt või külastada juba eelpool mainitud .
Tõenäoliselt ei ole paljudele kasu kogu eeltoodust, kuid vähemalt üldine idee sellest, kuidas see töötab, loodetavasti jäi alles.
Muide, valmis dekooder Pythonis juba eksisteerib, seda saab uurida . Ja SDR-vastuvõtjate omanikud saavad kokku panna ja käivitada valmis ADS-B dekooderi , sellest räägiti lähemalt .
Artiklis kirjeldatud parseri lähtekood on toodud allpool. See on testnäide, mis ei pretendeeri tootmisstandardile, kuid mõned asjad selles töötavad, ja salvestatud faili saab sellega parsida.
Lähtekood (Python)
from __future__ import print_function
from scipy.io import wavfile
from scipy import signal
import matplotlib.pyplot as plt
import numpy as np
import math
import sys
def parse_message(data, start, bit_len):
max_len = bit_len*128
A = data[start:start + max_len]
A = signal.resample(A, 10*max_len)
bits = np.zeros(10*max_len)
bit_len *= 10
start_data = bit_len*8
# Parse first 8 bits
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
df = int(bits_str[0:5], 2)
# Aircraft address (db - https://junzis.com/adb/?q=3b1c5c )
bits_str = ""
for p in range(8, 32):
pos = start_data + bit_len * p
p1, p2 = A[pos: pos + bit_len / 2], A[pos + bit_len / 2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
# print "Aircraft address:", bits_str, hex(int(bits_str, 2))
address = hex(int(bits_str, 2))
# Filter specific aircraft (optional)
# if address != "0x3c5ee2":
# return
if df == 16 or df == 17 or df == 18 or df == 19 or df == 20 or df == 21:
# print "Pos:", start, "DF:", msg_type
# Data (56bit)
bits_str = ""
for p in range(32, 88):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
# bits[pos + bit_len / 2] = 50
elif avg1 > avg2:
bits_str += "1"
# http://www.lll.lu/~edward/edward/adsb/DecodingADSBposition.html
# print "Data:"
# print bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17]
# Type Code:
tc, ec = int(bits_str[:5], 2), int(bits_str[5:8], 2)
# print("DF:", df, "TC:", tc)
# 1 - 4 Aircraft identification
# 5 - 8 Surface position
# 9 - 18 Airborne position (w/ Baro Altitude)
# 19 Airborne velocities
if tc >= 1 and tc <= 4: # and (df == 17 or df == 18):
print("Aircraft address:", address)
print("Data:")
print(bits_str[:8], bits_str[8:14], bits_str[14:20], bits_str[20:26], bits_str[26:32], bits_str[32:38], bits_str[38:44])
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Aircraft Identification:", code_str.replace('#', ''))
print()
if tc == 11:
print("Aircraft address:", address)
print("Data: (11)")
print(bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17])
# Bit 22 contains the F flag which indicates which CPR format is used (odd or even)
# First frame has F flag = 0 so is even and the second frame has F flag = 1 so odd
# f = bits_str[21:22]
# print("F:", int(f, 2))
# Altitude
alt1b = bits_str[8:20]
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
# lat_dec = int(bits_str[22:22+17], 2)
# lon_dec = int(bits_str[39:39+17], 2)
# print("Lat/Lon:", lat_dec, lon_dec)
# http://airmetar.main.jp/radio/ADS-B%20Decoding%20Guide.pdf
print()
if tc == 19:
print("Aircraft address:", address)
print("Data:")
# print(bits_str)
print(bits_str[:5], bits_str[5:8], bits_str[8:10], bits_str[10:13], bits_str[13] ,bits_str[14:24], bits_str[24], bits_str[25:35], bits_str[35:36], bits_str[36:65])
subtype = int(bits_str[5:8], 2)
# https://mode-s.org/decode/adsb/airborne-velocity.html
spd, hdg, rocd = -1, -1, -1
if subtype == 1 or subtype == 2:
print("Velocity Subtype 1: Ground speed")
v_ew_sign = int(bits_str[13], 2)
v_ew = int(bits_str[14:24], 2) - 1 # east-west velocity
v_ns_sign = int(bits_str[24], 2)
v_ns = int(bits_str[25:35], 2) - 1 # north-south velocity
v_we = -1*v_ew if v_ew_sign else v_ew
v_sn = -1*v_ns if v_ns_sign else v_ns
spd = math.sqrt(v_sn*v_sn + v_we*v_we) # unit in kts
hdg = math.atan2(v_we, v_sn)
hdg = math.degrees(hdg) # convert to degrees
hdg = hdg if hdg >= 0 else hdg + 360 # no negative val
if subtype == 3:
print("Subtype Subtype 3: Airspeed")
hdg = int(bits_str[14:24], 2)/1024.0*360.0
spd = int(bits_str[25:35], 2)
vr_sign = int(bits_str[36], 2)
vr = int(bits_str[36:45], 2)
rocd = -1*vr if vr_sign else vr # rate of climb/descend
print("Speed (kts):", spd, "Rate:", rocd, "Heading:", hdg)
print()
# print()
def calc_coordinates():
def _cprN(lat, is_odd):
nl = _cprNL(lat) - is_odd
return nl if nl > 1 else 1
def _cprNL(lat):
try:
nz = 15
a = 1 - math.cos(math.pi / (2 * nz))
b = math.cos(math.pi / 180.0 * abs(lat)) ** 2
nl = 2 * math.pi / (math.acos(1 - a/b))
return int(math.floor(nl))
except:
# happens when latitude is +/-90 degree
return 1
def floor_(x):
return int(math.floor(x))
lat1b, lon1b, alt1b = "10111000111010011", "10000110111111000", "000101111001"
lat2b, lon2b, alt2b = "10010011101011100", "10000011000011011", "000101110111"
lat1, lon1, alt1 = int(lat1b, 2), int(lon1b, 2), int(alt1b, 2)
lat2, lon2, alt2 = int(lat2b, 2), int(lon2b, 2), int(alt2b, 2)
# 131072 is 2^17, since CPR lat and lon are 17 bits each
cprlat_even, cprlon_even = lat1/131072.0, lon1/131072.0
cprlat_odd, cprlon_odd = lat2/131072.0, lon2/131072.0
print(cprlat_even, cprlon_even)
j = floor_(59*cprlat_even - 60*cprlat_odd)
print(j)
air_d_lat_even = 360.0 / 60
air_d_lat_odd = 360.0 / 59
# Lat
lat_even = float(air_d_lat_even * (j % 60 + cprlat_even))
lat_odd = float(air_d_lat_odd * (j % 59 + cprlat_odd))
if lat_even >= 270:
lat_even = lat_even - 360
if lat_odd >= 270:
lat_odd = lat_odd - 360
# Lon
ni = _cprN(lat_even, 0)
m = floor_(cprlon_even * (_cprNL(lat_even)-1) - cprlon_odd * _cprNL(lat_even) + 0.5)
lon = (360.0 / ni) * (m % ni + cprlon_even)
print("Lat", lat_even, "Lon", lon)
# Altitude
# Q-bit (bit 48) indicates whether the altitude is encoded in multiples of 25 or 100 ft (0: 100 ft, 1: 25 ft)
# The value can represent altitudes from -1000 to +50175 ft.
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
T = 1/fs
print("Sample rate %f MS/s" % (fs / 1e6))
print("Cnt samples %d" % len(data))
print("Duration: %f s" % (T * len(data)))
data = data.astype(float)
cnt = data.shape[0]
# Processing only part on file (faster):
# cnt = 10000000
# data = data[:cnt]
print("Processing I/Q...")
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
bits = np.zeros(cnt)
# To see scope without any processing, uncomment
# plt.plot(A)
# plt.show()
# sys.exit(0)
print("Extracting signals...")
pos = 0
avg = 200
msg_start = 0
# Find beginning of each signal
while pos < cnt - 16*1024:
# P1 - message start
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg and pos - msg_start > 1000:
msg_start = pos
bits[pos] = 100
pos += 4
break
pos += 1
start1, start2, start3, start4 = msg_start, 0, 0, 0
# P2
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start2 = pos
bits[pos] = 90
pos += 1
break
pos += 1
# P3
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start3 = pos
bits[pos] = 80
pos += 1
break
pos += 1
# P4
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start4 = pos
bits[pos] = 70
pos += 1
break
pos += 1
sig_diff = start4 - start1
if 20 < sig_diff < 25:
bits[msg_start] = 500
bit_len = int((start4 - start1) / 4.5)
# print(pos, start1, start4, ' - ', bit_len)
# start = start1 + 8*bit_len
parse_message(A, msg_start, bit_len)
pos += 450
# For debugging: check signal start
# plt.plot(A)
# plt.plot(bits)
# plt.show()
Loodan, et kellelegi oli huvitav, aitäh tähelepanu eest.
Allikas: habr.com
