

Google'i ettevõte DeepMind, mis on tuntud oma tehisintellekti ja närvivõrkude arenduste poolest, mis suudavad mängida arvutimängusid inimtasemel, teatas füüsikaprotsesside simulaatori MuJoCo (Multi-Joint dynamics with Contact) käivitamisest. Simulatsioonimootor on suunatud liigitatavate struktuuride modelleerimisele, mis suhtlevad ümbritseva keskkonnaga, ja seda kasutatakse robotite ja tehisintellekti süsteemide arendamisel enne, kui välja töötatud tehnoloogia jõuab valmis seadme kujule.
Kood on kirjutatud C/C++ keeltes ja avaldatakse Apache 2.0 litsentsi alusel. Toetatakse platvorme Linux, Windows ja macOS. Kõik projekti seotud lähtekoodid plaanitakse vabastada 2022. aastal, pärast mida MuJoCo läheb üle avatud arendust mudelile, mis võimaldab kogukonna esindajatel osaleda arenduses.
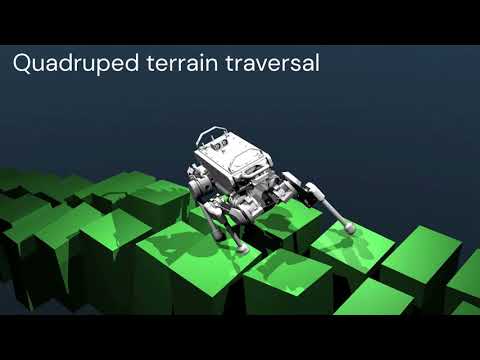
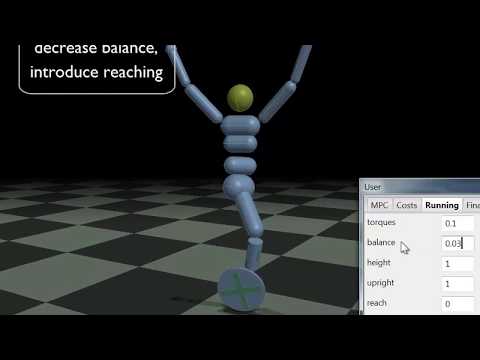
MuJoCo on universaalne füüsikalise simuleerimise mootori teek, mida saab kasutada robotite, biomehaaniliste seadmete ja masinõppesüsteemide, samuti graafika, animatsiooni ja videomängude arendamisel. Simulatsioonimootor on optimeeritud maksimaalse jõudluse saavutamiseks ja võimaldab madala taseme objektide manipuleerimist, tagades samal ajal kõrge täpsuse ja laiad modelleerimisvõimalused.
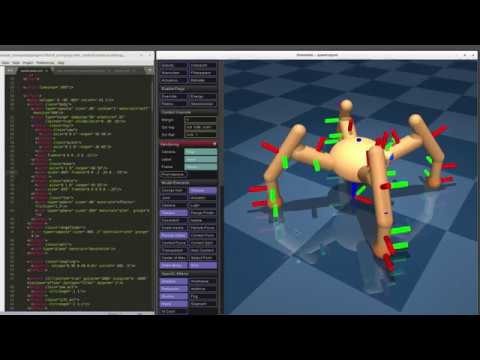
Mudeleid määratletakse stseenide kirjelduse keele MJCF abil, mis põhineb XML-il ja kompileeritakse spetsiaalse optimeerimise kompilaatori abil. Peale MJCF toetab mootori ka universaalse faili laadimist URDF formaadis (Unified Robot Description Format). MuJoCo pakub samuti graafilist liidest interaktiivseks 3D-visualiseerimiseks simuleerimise käigus ning tulemuste renderdamiseks OpenGL-i abil.
Põhifunktsioonid:
- Simulatsioon üldistes koordinaatides, välistades liigeste purunemise.
- Tagasilöök, mis on määratletud isegi kontaktide olemasolul.
- Konkreetsete piirangute ühtseks püstitamiseks on kasutatud konvexitest programmeerimist pidevas ajas.
- Erinevate piirangute määramine, sealhulgas pehmed kontaktid ja kuiv hõõrdumine.
- Osakeste, kangaste, köite ja pehmete objektide simulatsioon.
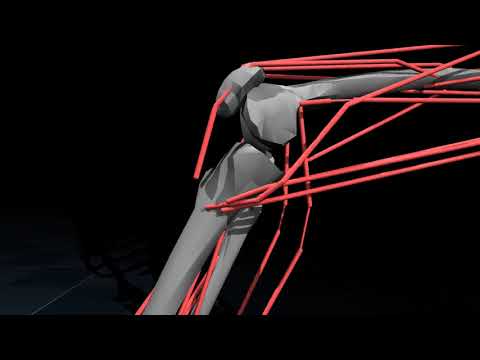
- Täitmisüksused (aktiivsed), sealhulgas mootoreid, silindrid, lihased, kõõlused ning pöördemomendi mehhanismid.
- Uurimisprogrammid, mis põhinevad Newtoni meetoditel, liitumisgradientidel ja Gaussi-Seideli meetodil.
- Võimalus kasutada püramiidseid või elliptilisi hõõrdumis konuseid.
- Vali kahe numbrilise integreerimise meetodi vahel: Euler või Runge-Kutta.
- Mitu jada ja diferentseerimine lõplike erinevuste meetodil.

Allikas: opennet.ru
