

Liikumine on elu. Seda lauset võib tõlgendada nii motivatsioonina edasi liikuda, mitte kohal peesitada ja saavutada soovitud eesmärke, kui ka faktilise tõdemisena, et praktiliselt kõik elusolendid veedavad suure osa oma elust liikumises. Et meie liikumised ja liikumised ruumis ei lõppeks iga kord põrutustega otsaesisele ja katki läinud varvastele, kasutab meie aju salvestatud „kaarte” ümbritsevast keskkonnast, mis ilmuvad alateadlikult meie liikumise hetkel. Siiski, on olemas teadlus, et aju rakendab neid kaarte mitte väljastpoolt, vaid asetades inimese sellele kaardile ja kogudes andmeid esmaülevaate nägemisel. Seda teooriat olid valmis tõestama Boston’i Ülikooli teadlased, viies läbi mitmeid praktilisi katseid laborihiirtega. Kuidas tõepoolest aju orienteerub ruumis, millised rakud selles osalevad, ja milline on selle uurimise roll tulevaste autonoomsete autode ja robotite jaoks? Seda saame teada uurimisgrupi aruandest. Asume teele.
Uuringu alus
Nii et juba aastaid tagasi paika pandud tõde on see, et aju peamine osa, mis vastutab ruumilise orienteerituse eest, on hipokampus.
Hipokampus osaleb mitmesugustes protsessides: emotsioonide kujundamises, lühiajalise mälu muutmises pikaajaliseks ja ruumilise mälu loomises. Just viimane on see, mis loob need 'kaardid', mida meie aju õigel hetkel kutsub, et tõhusamalt ruumis orienteeruda. Teisisõnu, hipokampos hoitakse kolmemõõtmelisi närvimudeleid ruumist, kus asub aju omanik.
Hipokampus
On teooria, mis väidab, et tegeliku navigeerimise ja hipokampuse kaartide vahel on vahepealne etapp — nende kaardite tõlgendamine esimese isiku vaatenurgast. See tähendab, et inimene püüab mõista, kus miski asub mitte üldiselt (nagu me näeme tõelistes kaartides), vaid kus miski asub suhte rohkem enda suhtes (nagu funktsioon 'tänava vaatamine' Google Mapsis).
Käesoleva uuringu autorid rõhutavad järgmist: keskkonna kognitiivsed kaardid kodeeritakse hipokampuse struktuuris allotsentriliseks süsteemiks, kuid motoorika (liikumised endid) on esitatud egoistlikus süsteemis.

UFO: Enemy Unknown (allotsentriline süsteem) ja DOOM (egoistlik süsteem).
Erinevus allotsentriliste ja egoistlike süsteemide vahel meenutab neljanda ja esimese isiku vaate vahelisi erinevusi. Esimeses juhul on meie jaoks oluline keskkond, teises – meie positsioon selle keskkonna suhtes. Seega tuleb allotsentrilised navigeerimisplaanid tõlkida egoistlikku süsteemi, et neid saaks tegelikult rakendada, st liikuda ruumis.
Uurijad usuvad, et just dorsomediaalne striatuum (DMS)* mängib olulist rolli eelnevalt kirjeldatud protsessis.
Inimese aju striatum.
Striatum* — часть мозга, которая относится к базальным ядрам; стриатум участвует в регуляции мышечного тонуса, внутренних органов и поведенческих реакций; стриатум также называют «полосатое тело» ввиду его структуры из чередующихся полос серого и белого вещества.
DMS демонстрирует нейронные ответы, связанные с принятием решений и выполнением действий относительно навигации в пространстве, потому этот участок мозга следует изучить подробнее.
Uuringu tulemused
Дабы определить наличие/отсутствие эгоцентрической пространственной информации в полосатом теле (DMS), 4 самцам крыс имплантировали до 16 тетродов (специальные электроды, подключаемые к нужным участкам мозга), нацеленных на DMS (1a).
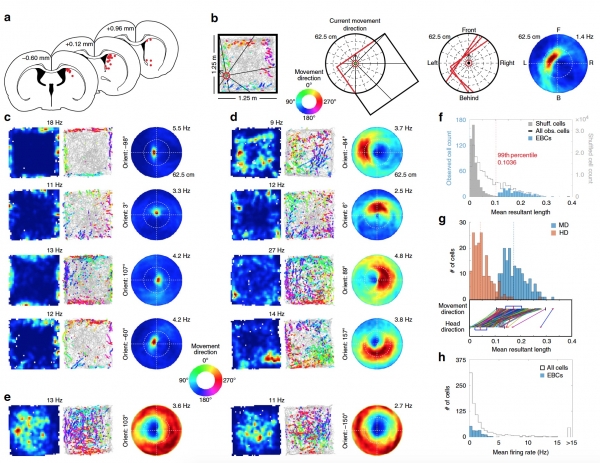
Изображение №1: реакция клеток полосатого тела на границы окружающей среды в эгоцентрической системе отсчета.
Пояснения к изображению №1:ä — точки расположения тетродов;
b — эгоцентрическая карта границ;
koos — ekstsentrilised ruumilised kaardid (4 ruutu vasakul), reaktsioonirakuharude trajektooride diagrammid, millel on värvikooditud asukohad rakureaktsioonide tipud keha positsiooni suhtes, ning egotsentrilised kaardid (4 ruutu paremal), mis põhinevad EBC rakkude reaktsioonidel erinevates orientatsioonides ja kaugustes roti ja seina vahel;
d — nagu ka 1s, kuid EBC jaoks eelistatud kaugustega, loomade kaugusele;
e — nagu ka 1s, kuid kahe vastupidise EBC jaoks;
f — keskmise resultantpikkuse jaotumine jälgitud rakkude jaoks;
g — keskmise resultantpikkuse jaotumine EBC jaoks, kasutades liikumise ja pea suunda;
h — rakureaktsiooni keskmise jaotumine (kõik ja EBC).
Viidi läbi 44 katset, kus rotid kogusid juhuslikult jaotatud toitu tuttavas keskkonnas (avatus, mitte labürindis). Tulemusena registreeriti 939 rakku. Kogutud andmetest tuvastati 31 peaga suunda näitavat rakku (HDC), kuid ainult väike osa rakkudest, täpsemalt 19, omasid allo-tsentrilisi ruumilisi suhteid. Samas jälgiti nende rakkude aktiivsust, mis oli piiratud ümbritseva keskkonna servaga, ainult roti liikumise ajal mööda testi kambrikonstruktsiooni seinu, mis näitab, et on olemas ego-tsentriline skeem ruumi piiride kodeerimiseks.
Selle ego-tsentrilise esitatud võimaluste hindamiseks, tuginedes rakkude aktiivsuse tippnäitajatele, loodi ego-tsentrilised piiride kaardid (1b), mis illustreerivad piiride orientatsiooni ja kaugust roti liikumissuuna suhtes, mitte tema peanurga (võrdlemise põhjal 1g).
18% registreeritud rakkudest (171 939-st) näitasid märgatavat reaktsiooni, kui kaamerapiir omas teatud asendit ja orientatsiooni katses osaleja suhtes (1f). Teadlased nimetasid neid egoistlikeks piirikudede rakkudeks (EBC — egoistlikud piirikudede rakud). Selliste rakkude arv katsealustes oli vahemikus 15 kuni 70, keskmine oli 42,75 (1c, 1d).
Egoistlike piirikudede rakkude seas oli rakkudest, mille aktiivsus vähenes kaamera piiri suhtes. Kokku oli neid 49, neid nimetati vastupidisteks EBC-deks (iEBC). EBC-d ja iEBC-de rakkude reaktsiooni keskmine näit (nende potentsiaalide suhtes) oli üsna madal — 1,26 ± 0,09 Hz (1h).
EBC rakkude populatsioon reageerib kõikidele kaamera piiri orientatsiooni ja asendi variantidele katsealuse suhtes, kuid eelistatud orientatsiooni jaotus on bimodaalne, kus tipud paiknevad 180° vastastikku mõlemalt poolt looma (-68° ja 112°), olles kergelt nihkunud looma pika telje suhtes 22° (2d).
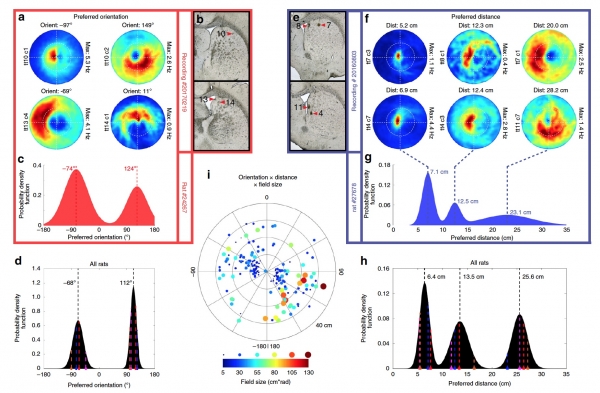
Pilt nr 2: eelistatud orientatsioon ja distantse egoistlike piirikudede rakkude reaktsiooniks (EBC).
Selgitused pildi nr 2 kohta:a — egoistlikud piirikudede kaardid neljale samaaegselt uuritud EBC-le erinevate eelistatud orientatsioonidega, nagu on näidatud iga diagrammi kohal;
b — tetrode'ide asend vastavalt rakkudele 2a (numbrid viitavad tetrode numbrile);
koos — tõenäosuste jaotumine eelistatud orienteeringute jaoks kõigi ühe roti EBC-de puhul;
d — tõenäosuste jaotumine eelistatud orienteeringute jaoks kõigi rottide EBC-de puhul;
aastat tagasi kirjutasime, et iga Check Pointi administreerija seisab varem või hiljem silmitsi küsimusega uuendamisest uuele versioonile. Selles — tetrode'de asend rakkude jaoks, nagu on näidatud 2f;
f — egoentsentrilised piiride kaardid kuue samal ajal salvestatud EBC jaoks, kust erinevad eelistatud kaugused on esitatud iga graafiku kohal;
g — tõenäosuste jaotumine eelistatud kauguse jaoks kõigi ühe roti EBC-de puhul;
h — tõenäosuste jaotumine eelistatud kauguse jaoks kõigi rottide EBC-de puhul;
i — polaarne diagramm eelistatud kaugusest ja eelistatud orienteeringust kõigi EBC-de puhul, kus ruumi suurust esindab värv ja punktide diameeter.
Eelistatud kauguse jaotus piirist sisaldas kolme tippu: 6.4, 13.5 ja 25.6 cm, mis viitavad kolmele erinevale eelistatud kaugusele EBC-de vahel (2f—2h), mis võivad olla olulised hierarhilise navigeerimise strateegia jaoks. EBC vastuvõtuväljade suurus suurenes vastavalt eelistatud kaugusele (2i), mis näitab egoistliku piiride esinduse täpsuse suurenemist seoses seinast ja katsealusest lühemate vahemaadega.
Nii eelistatud orientatsioonis kui ka kauguses puudus selge topograafia, kuna katsealuste aktiivsed EBC-d erineva orientatsiooni ja kauguse juures seina suhtes ilmusid ühel ja samal tetroodile (2a, 2b, 2e ja 2f).
Samuti leiti, et EBC-d reageerivad järjekindlalt ruumi piiridele (kaamera seintele) kõigis testikaamera variatsioonides. Selleks, et kinnitada, et EBC-d reageerivad kohalikele kaamera piiridele, mitte selle distaalsetele omadustele, pöörasid teadlased kaamera asukoha 45° ja tegid mitmest seinast mustad, muutes selle erinevaks eelnevalt testitud variandist.
Andmeid koguti nii tavapärases testikaameras kui ka pööratud versioonis. Hoolimata testikaamera muutumisest jäid kõik eelistatud orientatsioonid ja kaugused seina suhtes EBC-de puhul muutumatuks.
Arvestades nurkade tähtsust, kaaluti ka, et EBC kodeerib unikaalselt neid kohalikke keskkonnaomadusi. EBC rakkude alamkogumi (n = 16; 9,4%) esiletoomiseks, mis näitasid nurkade suhtes suurenenud vastust, eristati nurkade lähedal reageerimise ja seina keskele lähedal reageerimise vahe.
Seega võib järeldada, et just EBC rakud reageerivad suurepäraselt kaamera perimeetrile, st katsekaamera seintele ja nurkadele.
Edasi uurisid teadlased, kas EBC rakkude reaktsioon avatud ruumile (katseareen ilma labürindita, st lihtsalt 4 seina) on erinevate katsetamisruumide pindalade puhul sama. Tehti 3 katset, kus iga seinte pikkus erines eelnevatest 50 cm.
Ükskõik millised olid katsekaamera mõõtmed, EBC reageerisid selle piiridele sama kauguse ja orientatsiooni juures subjekti suhtes. See viitab sellele, et reaktsiooni jälgimine ei sõltu ümbritseva keskkonna suurusest.

Pilt №3: EBC rakkude stabiilne reaktsioon ruumi piiridele.
Selgitused pildile №3:ä — EBC keskpunktkardid normaalses olekus (vasakul) ja testikaamera pööramisel 45° (paremal);
b — EBC keskpunktkardid 1,25 x 1,25 m kaamera jaoks (vasakul) ja suurendatud 1,75 x 1,75 m kaamera jaoks (paremal);
koos — EBC keskpunktkardid tavaliste mustade seintega kaameras (vasakul) ja mustriliste seintega (paremal);
d—f — eelistatud kauguse diagrammid (üles) ja eelistatud orientatsiooni muutumine baasjoone suhtes (all);
Kuna triibuline keha saab keskkonna kohta teavet mitmest visuaalse ajukoore piirkonnast, kontrollisid teadlased ka, kas seinte välimus (3s) kaameras mõjutab EBC rakkude reageerimist.
Keskkonna piiride välimuse muutmine ei mõjutanud EBC rakkude reageerimist ega reageerimiseks vajalikku kaugust ja orientatsiooni katsesubjekti suhtes.
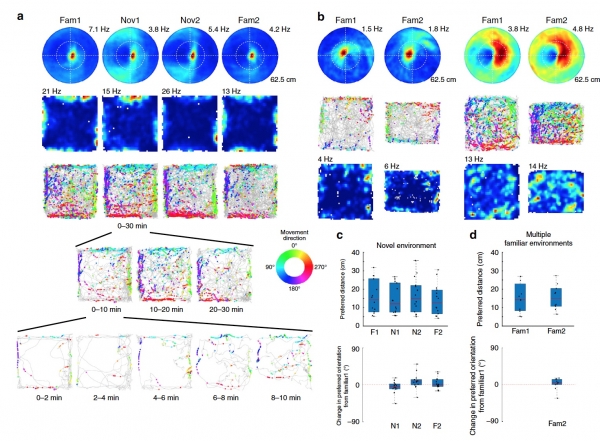
Pilt nr 4: EBC rakkude reaktsiooni stabiilsus olenemata keskkonnast.
Selgitused pildile nr 4:ä — EBC keskpunktkardid tuttavas (vasakul) ja uues (paremal) keskkonnas;
b — EBC keskpunktkardid, mis on saadud samas keskkonnas, kuid ajavahemiku jooksul;
koos — eelistatud kauguse graafikud (üleval) ja eelistatud suuna muutumise graafikud suhtes alusjoone (all) uutes (tunnetamata) keskkondades;
d — eelistatud kauguse graafikud (üleval) ja eelistatud suuna muutumise graafikud suhtes alusjoone (all) varasemalt uuritud (tuntud) keskkondades.
Samuti on leitud, et EBC rakkude reaktsioon, nagu ka nende vajalik suund ja kaugus katseisendist, ei muutu ajas.
Siiski viidi see "ajaliselt" test läbi samas katsekambris. Samuti on vajalik kontrollida, milline on erinevus EBC reaktsioonis tuntud tingimustele ja uutele. Selleks tehti mitu katset, kus rotid uurisid kambriga, mida nad juba eelmistest testidest teavad, ning seejärel uusi avatud ruumi kambrasid.
Nagu te juba aru saite, jäävad EBC rakkude reaktsioon + vajalik suund/kaugus uutesse kambrisse muutumatuks (4a, 4c).
Seega tagab EBC reaktsioon stabiilse keskkonna piiride esindatuse subjekti suhtes kõigis selle keskkonna tüüpides, sõltumata seinte välimusest, testkambrite pindalast, nende liikumisest ja ajast, mille subjekt veedab kaameras.
Kuna soovid teema nüanssidega lähemat tutvust teha, soovitame vaadata ja selle juurde.
Epilog
Käesolevas töös õnnestus teadlastel praktikas kinnitada teooriat ego-tsentrilisest keskkonna esindatusest, mis on äärmiselt oluline ruumis orienteerumiseks. Nad tõestasid, et allo-tsentrilise ruumilise esinduse ja tegeliku tegevuse vahel on vaheprotsess, milles osalevad teatud triibulise keha rakud, mida nimetatakse ego-tsentriliste piiride rakkudeks (EBC). Samuti leidis kinnitust, et EBC seondub rohkem kogu keha liikumise juhtimisega, mitte ainult subjekti pea juhtimisega.
See uurimus oli suunatud ruumi orienteerimise täieliku mehhanismi, kõigi selle komponentide ja muutuja määratlemisele. Teadlaste sõnul aitab see töö veelgi täiustada autonoomsete autode ja robotite navigeerimistehnoloogiaid, mis suudavad mõista enda ümber olevaid ruume, nii nagu meie seda teeme. Uurijad on oma töö tulemustest äärmiselt rahul, kuna need annavad alust uurida seoseid teatud ajupiirkondade ja ruumis navigeerimise vahel.
Aitäh tähelepanu eest, olge uudishimulikud ja head kogu nädalat tööle, sõbrad! 🙂
Aitäh, et olete meiega. Kas teile meeldivad meie artiklid? Soovite rohkem huvitavat sisu? Toetage meid tellimuse vormistamise või soovituste jagamisega sõpradele. 30% soodustus Habra kasutajatele meie ainulaadsetelt entry-level serveritelt, mis on loodud just teile: (saadaval on RAID1 ja RAID10 variandid, kuni 24 südamikku ja kuni 40GB DDR4).
Dell R730xd kaks korda odavam? Ainult meie juures Hollandi turul! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — alates $99! Lugege, kuidas
Allikas: habr.com
