

Üks Supermani tuntumaid võimeid on supernägemine, mis võimaldab tal vaadata aatomeid, näha pimeduses ja tohutul kaugusel ning näha läbi esemetest. Seda võimet demonstreeritakse ekraanidel äärmiselt harva, kuid see on olemas. Meie tegelikkuses on siiski võimalik näha läbi praktiliselt täiesti läbipaistmatute objektide, rakendades teatud teadustrikke. Siiski on saadud pildid alati olnud mustvalged kuni hiljaaegu. Täna tutvume uuringuga, kus Duki ülikooli teadlased (Ameerika Ühendriigid) suutsid teha värvilise pildi objektidest, mis on peidetud läbipaistmatu seina taha, kasutades ühekordset valgusmõju. Mis see supertehnoloogia on, kuidas see töötab ja millistes valdkondades seda saab rakendada? Sellest räägib meile teadusgrupp. Alustame.
Uuringu alus
Vaatamata kõikidele tehnoloogia võimalikele 'plusspoole' objektide visualiseerimiseks hajutavates keskkondades on selle tehnoloogia rakendamisel rida probleemid. Peamine probleem on see, et fotonite teed, mis läbivad hajutit, muutuvad märkimisväärselt, mis viib juhuslike mustriteni. spikk* teisel pool.
Spikk* — see on juhuslik interferentsipilt, mis tekib koherentsete lainete vastastikusel interferentsil, millel on juhuslikud faasisihid ja/või juhuslik intensiivsus. Tüüpiliselt näib see olevat helede täppide (punktide) kogum tumedal taustal.
Viimastel aastatel on välja töötatud mitmeid visualiseerimismeetodeid, mis võimaldavad ületada hajumisseente mõjusid ja välja tõmmata teavet objekti kohta spekli pildist. Nende meetodite probleemiks on nende piirangud — vajatakse teatud teadmisi objektist, juurdepääsu hajumismeedia või objekti kohta jne.
Samas on olemas oluliselt täiustatud meetod — mälu efekti visualiseerimine (ME). Selline meetod võimaldab visualiseerida objekti ilma eelneva teadmisega selle enda või hajumismeedia osas. Kõigil meetoditel on puudused, nagu me teame, ja ME meetodil ei ole erandeid. Kõrge kontrastsusega spekli mustrite ja seega täpsemaid pilte saamiseks peab valgustus olema kitsas, st vähem kui 1 nm.
ME-mudeli piiranguid on võimalik petta, kuid jälle need trikid on seotud optilise allika või objekti juurdepääsuga enne hajutit või otse mõõtmisega. PSF*.
PSF* — punktisummutuse funktsioon, mis kirjeldab pilti, mille süsteem formeerib, kui vaadatakse punktvalgusti või punktobjekti.
Teadlased nimetavad neid meetodeid toimivateks, kuid mitte täiuslikeks, kuna PSF-i mõõtmine ei ole alati võimalik, näiteks hajuti dünaamika või selle kättesaamatuse tõttu enne visualiseerimisprotseduuri. Teisisõnu, on palju, millega töötada.
Oma töös pakuvad teadlased välja teistsuguse lähenemise. Nad demonstreerivad meile objekti multiespectraalset visualiseerimist hajutamiskeskkonnas, kasutades monokroomset kaamerat ühe spekli mõõtmise kaudu. Erinevalt teistest meetoditest ei nõua see eelnevaid teadmisi PSF-süsteemi või allika spektri kohta.
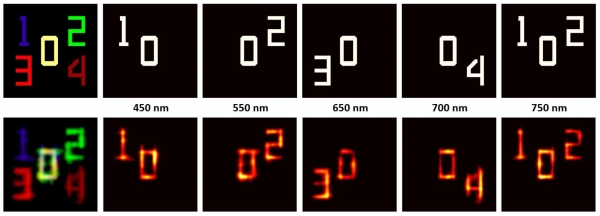
Uus meetod võimaldab luua kõrgkvaliteetseid sihtobjekti pilte viies hästi eraldatud spektri kanalis vahemikus 450 nm kuni 750 nm, mis on kinnitatud arvutustega. Praktikas on siiski seni õnnestunud visualiseerida kolme hästi eraldatud spektri kanali vahel 450 nm kuni 650 nm ning kuue külgneva spektri kanali vahel vahemikus 515 kuni 575 nm.
Uue meetodi tööpõhimõte
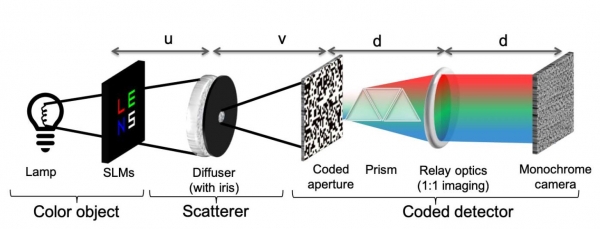
Pilt №1: lamp — ruumiline valgusmodulaator — hajuti (irooni diafragma) — kodeeriv aperature — prisma — optiline relee (visualiseerimine 1:1) — monochroomne kaamera.
Uurijad märgivad, et igasuguse visualiseerimise puhul hajuti kaudu on kolm peamist elementi: huviobjekt (valgustatud väljastpoolt või iseenesest valgustav), hajuti ja detektor.
Nagu tavalistes ME süsteemides, käsitletakse ka selles uuringus objekti, mille nurkade suurus asub ME vaatamisvälja sees ja kaugusel u hajutist. Pärast hajutiga suhtlemist valgus levib kaugusele v, enne kui jõuab detektorini.
Tavaline ME-visuaalisus kasutab standardkaameraid, samas kui selles meetodis kasutatakse kodeeriva detektori moodulit, mis koosneb kodeerivast apertuurist ja lainepikkusest sõltuvast optilisest elemendist. Selle elemendi eesmärk on iga spektraalkanali unikaalne moduleerimine enne nende ühendamist ja muundamist monokroomses detektoris.
Seega, selle asemel, et lihtsalt mõõta madala kontrastiga spektraali, mille spektraalkanaleid on tihedalt segatud, registreeriti spektraalselt multiplexeritud signaal, mis sobib hästi jaotamiseks.
Uurijad rõhutavad veel kord, et nende meetod ei nõua mingeid eelnevalt teadaolevaid omadusi ega oletusi hajutaja või valgusallika kohta.
Pärast multiplexeritud spektraali eelseid mõõtmisi kasutati tuntud väärtust Tλ (lainepikkusest sõltuv kodeerimismuster) igas spektraalribas spektraali individuaalseks rekonstrueerimiseks.
Oma töö käigus arvutuste ja modelleerimise etapis kasutasid teadlased teatud masinõppe meetodeid, mis võivad aidata rakendada varem käsitlemata meetodit. Eelkõige kasutati hõredate maatriksite tunnustamiseks õppimist spekli esitamiseks.
Tunnusteks õppimine* — võimaldab süsteemil automaatselt leida esitusi, mis on vajalikud algandmete tunnuste tuvastamiseks.
Tulemuseks oli baas, mis on koolitatud spekli piltide peal erinevate mõõtmete konfiguratsioonidest. See baas on piisavalt üldine ega sõltu konkreetsetest objektidest ja hajutajatest, mis osalevad Iλx, y maske genereerimises. Teisisõnu, süsteem õppis hajutaja põhjal, mida ei kasutatud eksperimentaalses konfiguratsioonis, s.t. süsteemil ei olnud sellele juurdepääsu, nagu teadlased soovisid.
Iga lainepikkuse spekli piltide saamiseks kasutati OMP algoritmi (ortogonaalne vastavusse viimine).
Lõppkokkuvõttes saadi objektipildid, arvutades igas spektraalkanalis isautokorrelatsiooni ja pöörates isautokorrelatsiooni igal lainepikkusel. Iga lainepikkuse saadud pildid ühendatakse seejärel, et luua objekti värviline pilt.
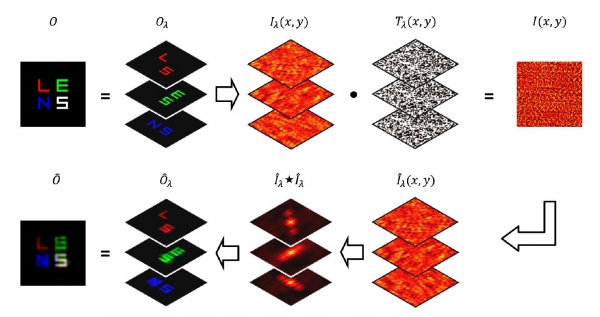
Pildi nr 2: objekti pildi koostamise etapid.
Selle meetodi loojate sõnul ei tee see mingeid oletusi spektraalkanalite vaheliste korrelatsioonide kohta ja nõuab ainult oletust, et lainepikkuse väärtus on piisavalt juhuslik. Lisaks vajab see meetod ainult teavet kodeeriva detektori kohta, tuginedes kodeeriva avause eelnevale kalibreerimisele ja eelnevalt koolitatud andmebaasile. Sellised omadused teevad selle visualiseerimismeetodi üsna universaalseks ja mitteinvasiivseks.
Simulatsiooni tulemused
Alustame simulatsiooni tulemustest.
Pilt nr 3
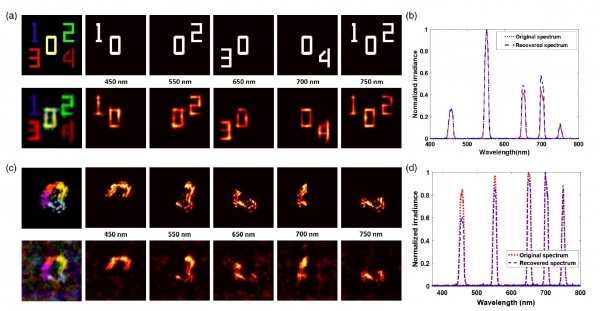
Ülaltoodud pildil on näidatud kahe objekti multispektrilise pildi näited, mis on tehtud läbi hajuti. Ülemine rida on 3a sisaldab huviobjekti, mis koosneb mitmest numbrist, mis kuvatakse nii valevärviga kui ka spektraalkanali lõikes. Valevärvi objekti ehitamisel kuvatakse iga lainepikkuse intensiivsuse profiil CIE 1931 RGB ruumis.
Rekonstrueeritud objekt (alumine rida 3a) nii valevärviga kui ka eraldi spektraalkanalite perspektiivist demonstreerib, et meetod tagab suurepärase visualiseerimise ja ainult vähe märgatavat rist-interaktsiooni spektraalkanalite vahel, mis ei mängi protsessis olulist rolli.
Pärast rekonstrueeritud objekti saamist, st pärast visualiseerimist, tuli hinnata täpsuse astet, võrreldes spektraalset intensiivsust (kõikide ereda pikselite keskmist) tõelise objekti ja rekonstrueeritud objekti vahel (3b).
Kujutistel 3c on näidatud tõeline objekt (ülal rida) ja rekonstrueeritud pilt (alumine rida) puuvilla varrest, ning 3d on näidatud visuaaliseerimise täpsuse analüüs.
Visuaalse kvaliteedi hindamiseks tuli arvutada objekti struktuurse sarnasuse koefitsient (SSIM) ja signaali ja müra suhe (pSNR) iga spektraalkanali jaoks.
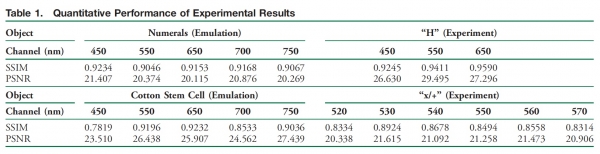
Ülaltoodud tabel näitab, et igal viiel kanalil on SSIM koefitsient vahemikus 0,8–0,9 ja PSNR üle 20. Seega, hoolimata spekli signaali madalast kontrastist, võimaldab viie 10 nm laius spektraalribade ülekandmine detektorile piisava täpsusega uuritava objekti ruumilisi ja spektraalseid omadusi rekonstrueerida. Teisisõnu, meetod toimib, kuid need on vaid simuleeritud tulemused. Usaldusväärsuse suurendamiseks viisid teadlased läbi rea praktilisi katseid.
Eksperimentide tulemused
Üks olulisemaid erinevusi modelleerimise ja reaalse katse vahel on keskkond, st tingimused, milles mõlemad toimuvad. Esimesel juhul on tingimused kontrollitud, teisel juhul ettearvamatud, st kuidas läheb.
Uuriti kolme spektraalset kanalit, mille laius on 8-12 nm ja keskpunktid 450, 550 ja 650 nm, mis koos erinevate suhteliste suurustega genereerivad laia värvide spektri.
Joonis №4
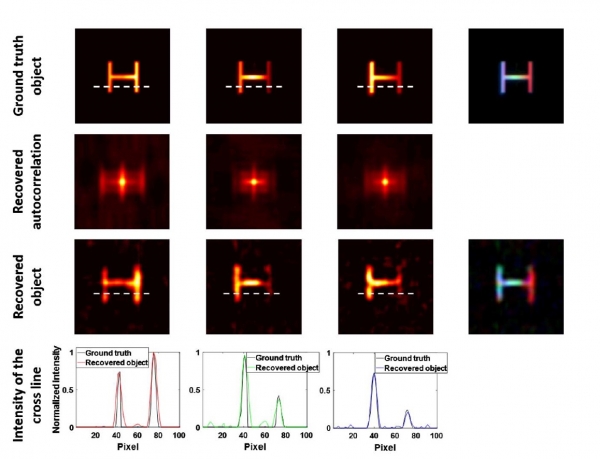
Ülaltoodud pildil on näidatud võrdlust tegeliku objekti (värviline täht «H») ja taastatud versiooni vahel. Valguse mõjutamise aeg (katkend, st. ekspositsioon) oli seatud 1800 s, mis võimaldas saavutada SNR vahemikus 60-70 dB. Selline SNR tase, teadlaste sõnul, pole eksperimentide jaoks äärmiselt oluline, kuid see kinnitab nende meetodi funktsionaalsust, eriti keerukate objektide puhul. Tegelikes oludes, mitte laboritingimustes, võib see meetod olla mitu korda kiirem.
Pildi nr 4 ülemisel real on igal lainepikkusel objekt (vasakult paremale) ja tegelik täisvärviline objekt.
Ette saada visuaalset tulemust, kasutati masinõppe kaamerat koos sobivate ribafilteritega spektrikomponentide otseseks kuvamiseks ja täisvärvilise pildi saamiseks, liites saadud spektraalsed kanalid.
Ülemine rida pildist näitab igas rekonstrueeritud spektraalses kanalis auto-korrelatsiooni mustreid, mis loovad multiplexitud mõõtmisi, mis on andmed andmete töötlemise etapile.
Kolmandas reas on rekonstrueeritud objekt igas spektraalses kanalis ning ka rekonstrueeritud täisvärviline objekt, st visualiseerimise lõpptulemus.
Täisvärviline pilt näitab, et spektraalsete kanalite vahelised suhtelised väärtused on samuti õiged, kuna rekonstrueeritud pildi värv vastab tegelikule väärtusele, ja SSIM koefitsient jõuab igas kanalisse üle 0,92.
Alumine rida kinnitab väidet, näidates reaalse objekti ja rekonstrueeritud objekti intensiivsuse võrdlust. Andmed mõlema kohta langevad kokku kõigis spektraalsetes vahemikes.
Seetõttu ei takistanud müra ja potentsiaalsed modelleerimisvead kõrge kvaliteediga pildi saamist ning katsetulemused sobivad hästi modelleerimistulemustega.
Ülaltoodud katse viidi läbi, arvestades eraldi spektraalset kanali. Teadlased viisid läbi veel ühe eksperimendi, kuid seekord külgnevate kanalitega, nimelt pideva spektraalse vahemikuga 60 nm.
Pilt nr 5
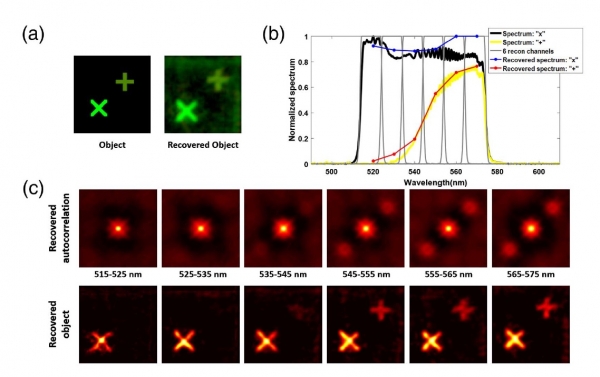
Reaalse objektina kujutas endast täht "X" ja märk "+" (5a). Tähe "Х" spekter on suhteliselt ühtlane ja järkjärguline — vahemikus 515 kuni 575 nm, samas kui "+" omab struktureeritud spektrit, mis on peamiselt paigutatud vahemikku 535 kuni 575 nm (5b). Antud eksperimendi eksponeerimine kestis 120 s, et saavutada soovitud (nagu eelnevalt) SNR 70 dB.
Samuti kasutati kogu objekti ulatuses 60 nm laiust ribafilterit ja alektiivfiltrit märgi «+» kohal. Rekonstruktsiooni käigus jaguneb 60 nm spekter kuue lähedase 10 nm laiuse kanali vahel (5b).
Nagu näeme piltidelt 5c, saadud pildid kokku langevad suurepäraselt tegeliku objektiga. Antud eksperiment näitas, et spektraalsete korrelatsioonide olemasolu või puudumine mõõdetud spekli puhul ei mõjuta uuritava visualiseerimismeetodi efektiivsust. Teadlased usuvad, et veelgi suuremat rolli visualiseerimisprotsessis, täpsemalt selle edus, mängivad mitte niivõrd objekti spektraalsed omadused, kuivõrd süsteemi kalibreerimine ja selle kodeeriva detektori üksikasjad.
Sügavamate teadmiste saamiseks uurimistöö nüanssidest soovitan vaadata ja selle juurde.
Epilog
Selles töös kirjeldasid teadlased uut multi-spektraalset visualiseerimismeetodit hajutaja kaudu. Spekli, mis sõltub lainepikkusest, modulaatorit, kasutades kodeerivat apertuuri, võimaldas teostada ühe multiplexitud mõõtmise ja arvutada spekli välja masinõppe põhjal oleva OMP algoritmi abil.
Erinevate värviliste tähtedega 'H' illustreerides näitasid teadlased, et viie spektraalkanali, mis vastavad violetsele, rohelisele ja kolmele punase tooni, keskendumine võimaldab luua pildi rekonstruktsiooni, mis sisaldab kõiki originaali värve (sinine, kollane jne).
Uurijate sõnul võib nende meetod olla kasulik nii meditsiinis kui ka astronoomias. Värvil on mõlemas suunas oluline informatsioon: astronoomias — uuritavate objektide keemiline koostis, meditsiinis — rakkude ja kudede molekulaarne koostis.
Praegusel etapil märgivad teadlased vaid ühte probleemi, mis võib põhjustada visualiseerimise ebatäpsusi: modelleerimise vead. Protsessi teostamiseks vajalik pikaajaline aeg võib tekitada keskkonnas muutusi, mis toovad endaga kaasa kohandusi, mida ettevalmistusprotsessis ei arvestatud. Tulevikus plaanitakse leida viise selle probleemi leevendamiseks, võimaldades kirjeldatud visualiseerimismeetodilt mitte ainult täpsust, vaid ka stabiilsust igas olukorras.
Reede off-topic:

Valgus, värv, muusika ja kolm kõige kuulsamat sinist 'veidrikku' maailmas (Blue Man Group).
Aitäh tähelepanu eest, jääge uudishimulikuteks ja nautige suurepäraseid nädalavahetusi, sõbrad! 🙂
Aitäh, et olete meiega. Kas teile meeldivad meie artiklid? Soovite rohkem huvitavat sisu? Toetage meid tellimuse vormistamise või soovituste jagamisega sõpradele. 30% soodustus Habra kasutajatele meie ainulaadsetelt entry-level serveritelt, mis on loodud just teile: (saadaval on RAID1 ja RAID10 variandid, kuni 24 südamikku ja kuni 40GB DDR4).
Dell R730xd kaks korda odavam? Ainult meie juures Hollandi turul! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — alates $99! Lugege, kuidas
Allikas: habr.com
