

Hauv kev xam phaj nrog Spectrum IEEE, cov tub ceev xwm NASA tau qhia cov ntsiab lus txog cov khoom siv kho vajtse ntawm lub dav hlau Ingenuity autonomous reconnaissance, uas tau tsaws tiav rau Mars nag hmo ua ib feem ntawm lub luag haujlwm Mars 2020. Qhov tseem ceeb ntawm qhov project yog kev siv lub rooj tsavxwm tswj hwm raws li Qualcomm Snapdragon 801 SoC, uas siv rau hauv cov xov tooj ntse. Ingenuity's software yog raws li lub hauv paus Linux thiab qhib software dav hlau. Nws tau sau tseg tias qhov no yog thawj zaug siv Linux Hauv cov khoom siv xa mus rau Mars. Ntxiv mus, kev siv cov software qhib thiab cov khoom siv kho vajtse muaj nyob rau hauv kev lag luam tso cai rau cov neeg nyiam tsim cov drones zoo sib xws lawv tus kheej.
Qhov kev txiav txim siab no yog vim qhov tseeb tias kev tswj hwm lub dav hlau ya yuav tsum muaj kev suav ntau dua li kev tswj hwm Mars rover, uas tau nruab nrog cov chips tshwj xeeb uas tsim los nrog kev tiv thaiv hluav taws xob ntxiv. Piv txwv li, tswj lub davhlau yuav tsum muaj lub voj voog tswj kev khiav ntawm 500 cycles ib ob thiab cov duab tsom xam ntawm 30 ntas ib ob.
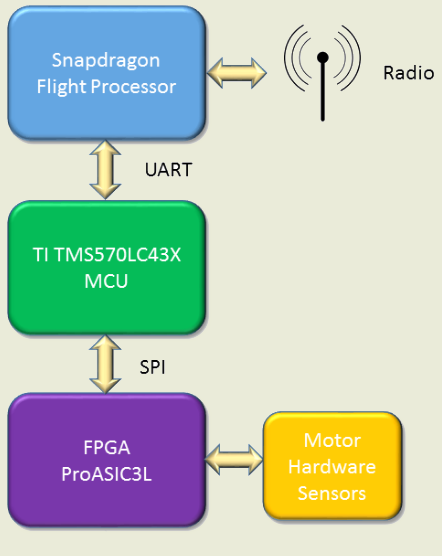
Lub Snapdragon 801 SoC (plaub lub cores, 2.26 GHz, 2 GB RAM, 32 GB Flash) yog siv los muab cov txheej txheem ib puag ncig raws li Linux, uas yog lub luag haujlwm rau kev ua haujlwm theem siab xws li kev taw qhia pom raws li kev tshuaj xyuas duab ntawm lub koob yees duab, kev tswj hwm cov ntaub ntawv, kev ua cov lus txib, kev tsim telemetry, thiab kev tswj hwm txoj kev sib txuas lus wireless.
Cov txheej txheem txuas nrog siv UART interface rau ob lub microcontrollers (MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB RAM, 4 MB Flash, UART, SPI, GPIO), uas ua haujlwm tswj lub davhlau. Ob lub microcontrollers yog siv rau redundancy nyob rau hauv cov ntaub ntawv ntawm tsis ua hauj lwm thiab tau txais cov ntaub ntawv zoo tib yam los ntawm cov sensors. Tsuas yog ib qho microcontroller yog nquag siv, thiab qhov thib ob yog siv los ua ib qho khoom seem thiab yog tias tsis ua haujlwm tuaj yeem tswj hwm. MicroSemi ProASIC3L FPGA yog lub luag haujlwm rau kev xa cov ntaub ntawv los ntawm cov sensors mus rau microcontrollers thiab rau kev cuam tshuam nrog cov actuators uas tswj cov hniav, uas kuj hloov mus rau lub microcontroller spare thaum tsis ua hauj lwm.
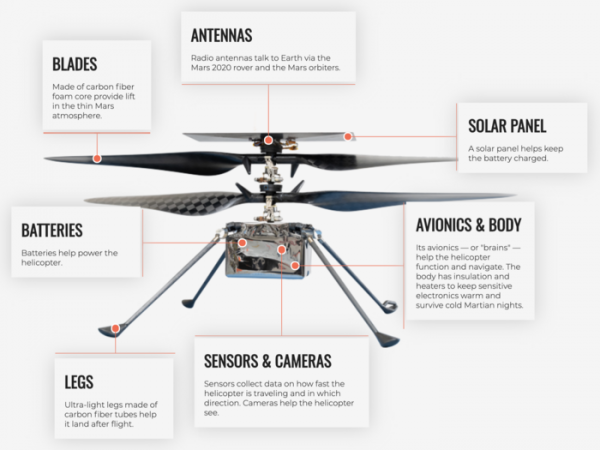
Ntawm cov cuab yeej siv, lub drone siv lub laser altimeter los ntawm SparkFun Electronics, lub tuam txhab uas tsim cov khoom siv qhib thiab yog ib qho ntawm cov neeg tsim cov ntsiab lus ntawm cov khoom siv qhib qhib (OSHW). Lwm cov khoom siv xws li gimbal stabilizer (IMU) thiab cov koob yees duab yees duab siv hauv smartphones. Ib lub VGA lub koob yees duab yog siv los taug qab qhov chaw, kev taw qhia thiab nrawm los ntawm kev sib piv ntawm ncej-los-nruab nrab. Lub koob yees duab 13-megapixel xim thib ob yog siv los thaij duab hauv cheeb tsam.
Lub davhlau tswj software Cheebtsam yog tsim los ntawm NASA JPL (Jet Propulsion Laboratory) rau me me thiab ultra-me me ntiaj teb dag satellites (cubesats) thiab tau tsim rau ntau xyoo raws li ib feem ntawm qhib platform F Prime (F'), faib nyob rau hauv lub Apache 2.0 daim ntawv tso cai.
F Prime muab cov cuab yeej rau kev txhim kho sai ntawm kev tswj hwm lub dav hlau thiab lwm yam kev siv embedded. Lub davhlau software tau muab faib ua ib tus neeg cov khoom nrog cov programming interfaces zoo. Ntxiv rau cov khoom tshwj xeeb, C ++ lub moj khaum tau muab nrog kev siv cov yam ntxwv xws li cov lus queuing thiab multithreading, nrog rau cov cuab yeej ua qauv uas tso cai rau koj los txuas cov khoom sib txuas thiab ua tiav cov lej.
Tau qhov twg los: opennet.ru
