

Foundation Fieldbus-ը թվային կապի համակարգ է, որն օգտագործվում է ավտոմատացման մեջ Profibus-ի, Modbus-ի կամ HART-ի հետ միասին: Տեխնոլոգիան ի հայտ է եկել մրցակիցներից մի փոքր ավելի ուշ. ստանդարտի առաջին հրատարակությունը թվագրվում է 1996 թվականին և ներկայումս ներառում է ցանցի մասնակիցների միջև տեղեկատվության փոխանակման երկու արձանագրություն՝ H1 և HSE (High Speed Ethernet):
H1 արձանագրությունն օգտագործվում է տեղեկատվության փոխանակման համար սենսորների և կարգավորիչների մակարդակով, և դրա ցանցը հիմնված է IEC 61158-2 ֆիզիկական շերտի ստանդարտի վրա, որը թույլ է տալիս տվյալների փոխանցման 31,25 կբիթ/վրկ արագություն: Միաժամանակ, դաշտային սարքերի էլեկտրամատակարարումը կարող է կազմակերպվել տվյալների փոխանցման ավտոբուսից: HSE ցանցը հիմնված է բարձր արագության Ethernet ցանցերի (100/1000 Մբիթ/վրկ) վրա և օգտագործվում է APCS ցանց կառուցելու համար կարգավորիչների և ձեռնարկության կառավարման համակարգերի մակարդակով:
Տեխնոլոգիան կիրառելի է ցանկացած արդյունաբերական օբյեկտների ավտոմատացված գործընթացների կառավարման համակարգերի կառուցման մեջ, բայց առավել տարածված է դարձել նավթի, գազի և քիմիական արդյունաբերության ձեռնարկություններում։
Տեխնոլոգիական հնարավորություններ
Foundation Fieldbus-ը մշակվել է որպես անալոգային սենսորների վրա հիմնված ավտոմատ կառավարման համակարգերի ավանդական մոդելի այլընտրանք և ստացել է մի շարք առավելություններ ինչպես ավանդական մոդելի, այնպես էլ Profibus-ի կամ HART-ի վրա հիմնված թվային համակարգերի համեմատ։
Հիմնական առավելություններից մեկը համակարգերի բարձր հուսալիությունն ու խափանումների նկատմամբ հանդուրժողականությունն է։ H1, որը ձեռք է բերվում երկու գործոնի շնորհիվ.
- դաշտային մակարդակում ինտելեկտուալ սարքերի (սենսորների և ակտուատորների) օգտագործումը։
- դաշտային մակարդակի սարքերի միջև տեղեկատվության փոխանակումը ուղղակիորեն կազմակերպելու ունակություն՝ առանց վերահսկիչի մասնակցության:
Դաշտային սարքերի ինտելեկտը կայանում է կառավարման և տեղեկատվության մշակման ալգորիթմներ ներդնելու ունակության մեջ, որոնք ավանդաբար ներդրվում են կառավարիչում: Գործնականում սա թույլ է տալիս համակարգին շարունակել աշխատանքը, նույնիսկ եթե կառավարիչը խափանվում է: Սա պահանջում է, որ դաշտային սարքերը համապատասխանաբար կարգավորվեն և ապահովվի դաշտային ավտոբուսի հուսալի էլեկտրամատակարարման համակարգ:
Կառավարման համակարգի թվայնացման և խելացի սենսորների օգտագործման լրացուցիչ առավելություններից են յուրաքանչյուր դաշտային սարքից չափումից բացի ավելի շատ տվյալներ ստանալու հնարավորությունը, ինչը, վերջին հաշվով, ընդլայնում է գործընթացի մոնիթորինգի շրջանակը, որը սահմանափակվում է ազդանշանի մուտքային/ելքային համակարգով ավանդական անալոգային համակարգերում։
H1 ցանցում ավտոբուսային տոպոլոգիայի կիրառումը թույլ է տալիս կրճատել մալուխային գծերի երկարությունը, տեղադրման աշխատանքների ծավալը և վերացնել կառավարման համակարգերում լրացուցիչ սարքավորումների անհրաժեշտությունը՝ մուտքային/ելքային մոդուլներ, սնուցման աղբյուրներ, իսկ պայթյունավտանգ տարածքներում՝ կայծային պաշտպանիչ արգելապատնեշներ։
H1-ը թույլ է տալիս օգտագործել 4-20 մԱ սենսորային կապի գծի մալուխներ, որոնք կարող են օգտագործվել հին կառավարման համակարգերի արդիականացման ժամանակ: Ներքին անվտանգության սկզբունքների կիրառման շնորհիվ տեխնոլոգիան ակտիվորեն օգտագործվում է պայթյունավտանգ միջավայրերում: Ստանդարտացումն ինքնին երաշխավորում է տարբեր արտադրողների սարքավորումների փոխարինելիությունը և համատեղելիությունը, և դարպասային սարքերի շնորհիվ հնարավոր է միջերես ստեղծել դաշտային սարքերի ցանցի և Ethernet-ի վրա կառուցված ձեռնարկության APCS ցանցերի միջև:
Foundation Fieldbus H1-ը ամենամեծ նմանությունն ունի Profibus PA համակարգերի հետ։ Երկու տեխնոլոգիաներն էլ հիմնված են նույն ֆիզիկական մակարդակի ստանդարտի վրա, ուստի այս համակարգերն ունեն նույն տվյալների փոխանցման արագությունները, Մանչեսթերի կոդավորումը, կապի գծի էլեկտրական պարամետրերը, փոխանցվող հնարավոր հզորության արժեքը, ցանցային հատվածում մալուխի թույլատրելի առավելագույն երկարությունը (1900 մ)։ Բացի այդ, երկու համակարգերն էլ կարող են օգտագործել մինչև 4 կրկնիչ, որի շնորհիվ հատվածի երկարությունը կարող է հասնել 9,5 կմ-ի։ Ընդհանուր են կառավարման համակարգում հնարավոր ցանցային տոպոլոգիաները, ինչպես նաև ներքին անվտանգության ապահովման սկզբունքները։
Համակարգի բաղադրիչներ
Foundation Fieldbus H1 ցանցի հիմնական տարրերն են՝
- ապակենտրոնացված կառավարման համակարգի (DCS) կառավարիչ;
- դաշտային ավտոբուսային սնուցման աղբյուրներ;
- բլոկային կամ մոդուլային ինտերֆեյսային սարքեր;
- ավտոբուսային տերմինատորներ;
- խելացի դաշտային սարքեր։
Համակարգը կարող է նաև ներառել դարպասային սարքեր (կապող սարք), արձանագրության փոխարկիչներ, SPD-ներ և կրկնիչներ։
Ցանցի տոպոլոգիա
H1 ցանցի կարևոր հասկացություններից մեկը հատվածի հասկացությունն է: Այն մայրուղի գիծ է (Trunk), որից դուրս եկող ճյուղերով (Spur), որին միացված են դաշտային սարքերը: Մայրուղային մալուխը սկսվում է ավտոբուսի սնուցման աղբյուրից և սովորաբար ավարտվում է վերջին ինտերֆեյսային սարքում: Կառավարիչը դաշտային սարքերին միացնելու համար թույլատրվում է չորս տեսակի տոպոլոգիա՝ կետից կետ, օղակ, ավտոբուս և ծառ: Յուրաքանչյուր հատված կարող է կառուցվել կամ առանձին տոպոլոգիայի, կամ դրանց համադրության միջոցով:

Կետ-կետ տոպոլոգիան օգտագործելիս յուրաքանչյուր դաշտային սարք միացված է անմիջապես կառավարիչին։ Այս դեպքում յուրաքանչյուր միացված դաշտային սարք ձևավորում է իր սեփական ցանցային հատվածը։ Այս տոպոլոգիան անհարմար է դառնում, քանի որ այն զրկում է համակարգը գրեթե բոլոր առավելություններից, որոնք ներդրված են Foundation Fieldbus-ում։ Կառավարիչի վրա օգտագործվում են չափազանց շատ ինտերֆեյսներ, և դաշտային սարքերը տվյալների ավտոբուսից սնուցելու համար յուրաքանչյուր կապի գիծ պետք է ունենա իր սեփական դաշտային ավտոբուսի սնուցման աղբյուրը։ Կապի գծերի երկարությունը չափազանց մեծ է, և սարքերի միջև տեղեկատվության փոխանակումն իրականացվում է միայն կառավարիչի միջոցով, ինչը թույլ չի տալիս օգտագործել H1 համակարգերի բարձր խափանումների հանդուրժողականության սկզբունքը։
Ցիկլային տոպոլոգիան ենթադրում է դաշտային սարքերի հաջորդական միացում միմյանց: Այստեղ բոլոր դաշտային սարքերը միավորվում են մեկ հատվածի մեջ, ինչը թույլ է տալիս օգտագործել ավելի քիչ ռեսուրսներ: Սակայն այս տոպոլոգիան ունի նաև իր թերությունները. նախևառաջ անհրաժեշտ է ապահովել մեթոդներ, որոնց միջոցով միջանկյալ սենսորներից մեկի խափանումը չի հանգեցնի մյուսների հետ կապի խզման: Մեկ այլ թերություն կապի գծում կարճ միացումներից պաշտպանության բացակայությունն է, որի դեպքում հատվածում տեղեկատվության փոխանակումը անհնար կլինի:
Մյուս երկու ցանցային տոպոլոգիաները՝ ավտոբուսային և ծառային տոպոլոգիաները, ամենահուսալիներն ու գործնականներն են, որոնք H1 ցանցեր կառուցելիս ամենատարածվածն են գործնականում: Այս տոպոլոգիաների գաղափարն այն է, որ դաշտային սարքերը մայրուղային գծին միացնելու համար օգտագործվեն ինտերֆեյսային սարքեր: Ինտերֆեյսային սարքերը թույլ են տալիս յուրաքանչյուր դաշտային սարք միանալ իր սեփական ինտերֆեյսին:
Ցանցի պարամետրեր
H1 ցանց կառուցելիս կարևոր հարցերն են դրա ֆիզիկական պարամետրերը՝ քանի՞ դաշտային սարք կարող է օգտագործվել հատվածում, որքա՞ն է հատվածի առավելագույն երկարությունը, որքա՞ն է ճյուղերի երկարությունը: Այս հարցերի պատասխանը կախված է դաշտային սարքերի էլեկտրամատակարարման տեսակից և էներգիայի սպառումից, իսկ պայթուցիկ օբյեկտների դեպքում՝ ներքին անվտանգության ապահովման մեթոդներից:
Հատվածում դաշտային սարքերի առավելագույն քանակը (32) կարող է հասնել միայն այն դեպքում, եթե դրանք սնուցվում են տեղում գտնվող տեղական աղբյուրներից և ներքին անվտանգության միջոցառումների բացակայության դեպքում: Երբ սենսորներն ու ակտուատորները սնուցվում են տվյալների ավտոբուսից, սարքերի առավելագույն քանակը կարող է լինել միայն 12 կամ պակաս՝ կախված ներքին անվտանգությունն ապահովելու մեթոդներից:
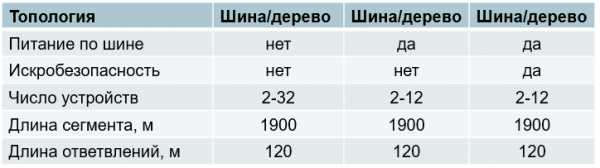
Դաշտային սարքերի քանակի կախվածությունը էլեկտրամատակարարման եղանակից և ներքին անվտանգության ապահովման մեթոդները։
Ցանցային հատվածի երկարությունը որոշվում է օգտագործվող մալուխի տեսակով: A տիպի մալուխի (ոլորված զույգ՝ վահանով) օգտագործման դեպքում հասնում են առավելագույնը 1900 մ երկարության: D տիպի մալուխի (ոչ ոլորված բազմամիջուկ մալուխ՝ ընդհանուր վահանով) օգտագործման դեպքում՝ ընդամենը 200 մ: Հատվածի երկարությունը հասկացվում է որպես գլխավոր մալուխի և դրանից եկող բոլոր ճյուղերի երկարությունների գումար:
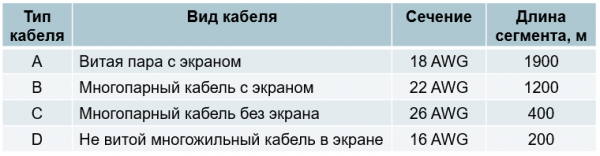
Սեգմենտի երկարության կախվածությունը մալուխի տեսակից։
Ճյուղերի երկարությունը կախված է ցանցային հատվածում սարքերի քանակից։ Այսպիսով, մինչև 12 սարքերի քանակի դեպքում սա առավելագույնը 120 մ է։ Հատվածում 32 սարք օգտագործելիս ճյուղերի առավելագույն երկարությունը կկազմի ընդամենը 1 մ։ Դաշտային սարքերը օղակում միացնելիս յուրաքանչյուր լրացուցիչ սարք ճյուղի երկարությունը կրճատում է 30 մ-ով։
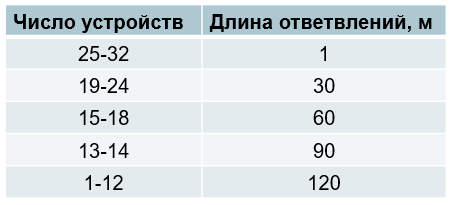
Գլխավոր մալուխի ճյուղերի երկարության կախվածությունը հատվածում դաշտային սարքերի քանակից։
Այս բոլոր գործոնները անմիջականորեն ազդում են համակարգի կառուցվածքի և տոպոլոգիայի վրա: Ցանցի նախագծման գործընթացը արագացնելու համար օգտագործվում են հատուկ ծրագրային փաթեթներ, ինչպիսիք են FieldComm Group-ի DesignMate-ը կամ Phoenix Contact-ի Fieldbus Network Planner-ը: Ծրագրերը թույլ են տալիս հաշվարկել H1 ցանցի ֆիզիկական և էլեկտրական պարամետրերը՝ հաշվի առնելով բոլոր հնարավոր սահմանափակումները:
Համակարգի բաղադրիչների նպատակը
Վերահսկիչ
Կառավարիչի խնդիրն է իրականացնել Link Active Scheduler (LAS)-ի գործառույթները, որը ցանցը կառավարող հիմնական սարքն է՝ ծառայողական հաղորդագրություններ ուղարկելով: LAS-ը նախաձեռնում է տեղեկատվության փոխանակում ցանցի մասնակիցների միջև՝ պլանավորված (ըստ ժամանակացույցի) կամ չպլանավորված հաղորդագրությունների միջոցով, կատարում է ախտորոշում և համաժամեցնում է բոլոր սարքերը:
Բացի այդ, կառավարիչը պատասխանատու է դաշտային սարքերի ավտոմատ հասցեավորման համար, գործում է որպես դարպասային սարք, ապահովելով Ethernet ինտերֆեյս կառավարման համակարգի վերին մակարդակի հետ կապի համար՝ հիմնվելով Foundation Fieldbus HSE-ի կամ այլ հաղորդակցման արձանագրության վրա: Համակարգի վերին մակարդակի համար կառավարիչը ապահովում է օպերատորի կողմից մոնիթորինգի և կառավարման գործառույթներ, ինչպես նաև դաշտային սարքերի հեռակա կարգավորման գործառույթներ:
Ցանցում կարող են լինել մի քանի ակտիվ կապի ժամանակացույցեր, որոնք ապահովում են դրանցում ներկառուցված գործառույթների ավելորդությունը: Ժամանակակից համակարգերում LAS գործառույթները կարող են իրականացվել դարպասային սարքում, որը գործում է որպես արձանագրության փոխարկիչ կառավարման համակարգերի համար, որոնք կառուցված են Foundation Fieldbus HSE-ից տարբեր ստանդարտի վրա:
Fieldbus-ի էլեկտրամատակարարում
H1 ցանցի էլեկտրամատակարարման համակարգը կարևոր դեր է խաղում, քանի որ տեղեկատվության փոխանակումը հնարավոր դարձնելու համար տվյալների մալուխը պետք է պահպանվի 9-ից 32 Վ հաստատուն հոսանքի լարման վրա: Անկախ նրանից, թե դաշտային սարքերը սնուցվում են տվյալների ավտոբուսով, թե տեղական էլեկտրամատակարարումներով, ցանցը պահանջում է ավտոբուսային էլեկտրամատակարարում:
Հետևաբար, դրանց հիմնական նպատակը ավտոբուսի վրա անհրաժեշտ էլեկտրական պարամետրերի պահպանումն է, ինչպես նաև ցանցին միացված սարքերի էլեկտրամատակարարումը: Ավտոբուսի էլեկտրամատակարարումները տարբերվում են սովորական էլեկտրամատակարարումներից նրանով, որ ունեն համապատասխան ելքային միացման դիմադրություն տվյալների փոխանցման հաճախականություններում: Եթե H1 ցանցը անմիջապես սնուցելու համար օգտագործվում են 12 կամ 24 Վ էլեկտրամատակարարումներ, ազդանշանը կկորչի, և տեղեկատվության փոխանակումը ավտոբուսում անհնար կլինի:

FB-PS դաշտային ավտոբուսի ավելորդ սնուցման աղբյուրներ (հավաքված 4 հատվածի համար):
Հաշվի առնելով հուսալի ավտոբուսային էլեկտրամատակարարման ապահովման կարևորությունը, յուրաքանչյուր ցանցային հատվածի էլեկտրամատակարարումները կարող են ավելորդ լինել: Phoenix Contact-ի FB-PS էլեկտրամատակարարումները աջակցում են հոսանքի բեռի ավտոմատ հավասարակշռման տեխնոլոգիային (Auto Current Balancing): ACB-ն ապահովում է էլեկտրամատակարարումների միջև սիմետրիկ բեռ, ինչը դրական ազդեցություն է ունենում դրանց ջերմաստիճանային պայմանների վրա և, ի վերջո, հանգեցնում է դրանց ծառայության ժամկետի երկարացմանը:
H1 ցանցի էլեկտրամատակարարման համակարգը սովորաբար տեղակայված է կառավարիչի պահարանում։
Սարքերի զուգակցում
Ինտերֆեյսային սարքերը նախատեսված են դաշտային սարքերի խումբը հիմնական տվյալների փոխանցման ավտոբուսին միացնելու համար: Կատարվող գործառույթների համաձայն՝ դրանք բաժանվում են երկու տեսակի՝ հատվածային պաշտպանության մոդուլներ (Segment Protectors) և դաշտային արգելապատնեշներ (Field Barriers):
Անկախ տեսակից, ինտերֆեյսային սարքերը պաշտպանում են ցանցը կարճ միացումներից և ելքային գծերի հոսանքի գերբեռնվածությունից: Երբ տեղի է ունենում կարճ միացում, ինտերֆեյսային սարքը արգելափակում է ինտերֆեյսային միացքը՝ կանխելով կարճ միացման տարածումը ամբողջ համակարգում և այդպիսով ապահովելով տեղեկատվության փոխանակումը այլ ցանցային սարքերի միջև: Գծի կարճ միացումը վերացնելուց հետո նախկինում արգելափակված կապի միացքը կրկին սկսում է աշխատել:
Դաշտային արգելապատնեշները լրացուցիչ ապահովում են գալվանական մեկուսացում գլխավոր ավտոբուսի ոչ ներքին անվտանգ շղթաների և միացված դաշտային սարքերի (ճյուղերի) ներքին անվտանգ շղթաների միջև։
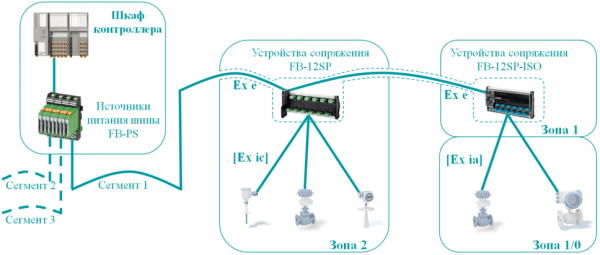
Ֆիզիկապես կան նաև երկու տեսակի ինտերֆեյսային սարքեր՝ բլոկային և մոդուլային: FB-12SP տիպի բլոկային ինտերֆեյսային սարքերը՝ հատվածային պաշտպանության ֆունկցիոնալությամբ, թույլ են տալիս օգտագործել ներքին անվտանգությամբ ինտեգրալ սխեմաներ՝ 2-րդ գոտու դաշտային սարքերը միացնելու համար, իսկ FB-12SP ISO դաշտային արգելապատնեշները թույլ են տալիս միացնել 1-ին և 0 գոտիներում ներքին անվտանգությամբ ինտեգրալ սխեմաներով սարքերը:

Phoenix Contact-ի FB-12SP և FB-6SP ինտերֆեյսային սարքերը։
Մոդուլային սարքերի առավելություններից մեկը համակարգը մասշտաբավորելու հնարավորությունն է՝ ընտրելով դաշտային սարքերը միացնելու համար անհրաժեշտ ալիքների քանակը: Բացի այդ, մոդուլային սարքերը թույլ են տալիս ստեղծել ճկուն կառուցվածքներ: Մեկ բաշխիչ պահարանում հնարավոր է համատեղել հատվածային պաշտպանության մոդուլները և դաշտային արգելապատնեշները, այսինքն՝ մեկ պահարանից միացնել տարբեր պայթյունավտանգ գոտիներում տեղակայված դաշտային սարքերը: Մեկ ավտոբուսի վրա կարելի է տեղադրել ընդհանուր առմամբ մինչև 12 երկալիք FB-2SP մոդուլ կամ միալիք FB-ISO արգելապատնեշային մոդուլներ, այդպիսով մեկ պահարանից միացնելով մինչև 24 դաշտային սարք 2-րդ գոտում կամ մինչև 12 սենսոր 1-ին կամ 0 գոտիներում:
Ինտերֆեյսային սարքերը կարող են օգտագործվել լայն ջերմաստիճանային տիրույթում և տեղադրվում են պայթյունապաշտպան Ex e, Ex d պատյաններում՝ առնվազն IP54 փոշուց և խոնավությունից պաշտպանության վարկանիշով, այդ թվում՝ վերահսկվող օբյեկտին հնարավորինս մոտ։
Հոսանքի լարման պաշտպանության սարքեր
Դաշտային մակարդակի H1 ցանցերը կարող են ձևավորել շատ երկար հատվածներ, իսկ կապի գծերը կարող են անցնել այն վայրերով, որտեղ հնարավոր են իմպուլսային գերլարումներ: Իմպուլսային գերլարումները հասկացվում են որպես կայծակի լիցքաթափումների կամ մոտակա մալուխային գծերում կարճ միացումների հետևանքով առաջացած ինդուկցված պոտենցիալների տարբերություններ: Ինդուկցված լարումը, որի արժեքը մի քանի կիլովոլտի կարգի է, առաջացնում է կիլոամպերների լիցքաթափման հոսանքներ: Այս բոլոր երևույթները տեղի են ունենում միկրովայրկյանների ընթացքում, բայց կարող են հանգեցնել H1 ցանցի բաղադրիչների խափանմանը: Նման երևույթներից սարքավորումները պաշտպանելու համար անհրաժեշտ է օգտագործել SPD-ներ: SPD-ների օգտագործումը սովորական սնուցման տերմինալների փոխարեն երաշխավորում է համակարգի հուսալի և անվտանգ աշխատանքը անբարենպաստ պայմաններում:
Դրա աշխատանքի սկզբունքը հիմնված է նանովայրկյանների միջակայքում կիսակարճ միացման օգտագործման վրա՝ պարպման հոսանքների հոսքի համար այնպիսի մի շղթայում, որն օգտագործում է այս մեծության հոսանքների հոսքին դիմակայելու ունակ տարրեր։
Կան SPD-ների բազմաթիվ տեսակներ՝ միալիք, երկալիք, փոխարինելի խցաններով, տարբեր տեսակի ախտորոշմամբ՝ թարթող, չոր կոնտակտի տեսքով: Phoenix Contact-ի ժամանակակից ախտորոշիչ գործիքները թույլ են տալիս վերահսկել SPD-ները՝ օգտագործելով Ethernet-ի վրա հիմնված թվային ծառայություններ: Ընկերության գործարանը Ռուսաստանում արտադրում է պայթուցիկ միջավայրերում, այդ թվում՝ Foundation Fieldbus համակարգերում օգտագործելու համար հավաստագրված սարքեր:
Ավտոբուսի վերջնակետ
Տերմինատորը ցանցում կատարում է երկու գործառույթ՝ այն շունտավորում է դաշտային ավտոբուսի հոսանքը, որն առաջանում է ազդանշանի մոդուլյացիայի պատճառով, և կանխում է ազդանշանի անդրադարձումը մայրուղային գծի ծայրերից, այդպիսով կանխելով աղմուկի և ջիթերի (թվային ազդանշանի փուլային տատանումների) առաջացումը: Այսպիսով, տերմինատորը թույլ է տալիս խուսափել ցանցում անճշտ տվյալների առաջացումից կամ տվյալների ամբողջական կորստից:
Յուրաքանչյուր H1 ցանցային հատված պետք է ունենա երկու տերմինատոր՝ հատվածի յուրաքանչյուր ծայրում: Phoenix Contact ավտոբուսի սնուցման աղբյուրները և ինտերֆեյսային սարքերը հագեցած են անջատվող տերմինատորներով: Լրացուցիչ տերմինատորների առկայությունը ցանցում, օրինակ՝ սխալի պատճառով, զգալիորեն կնվազեցնի ազդանշանի մակարդակը ինտերֆեյսային գծում:
Տեղեկատվության փոխանակում հատվածների միջև
Դաշտային սարքերի միջև տեղեկատվության փոխանակումը չի սահմանափակվում մեկ հատվածով, այլ հնարավոր է տարբեր ցանցային հատվածների միջև, որոնք կարող են միացվել կառավարիչի կամ Ethernet-ի վրա հիմնված ձեռնարկության ցանցի միջոցով: Այս դեպքում կարող է օգտագործվել Foundation Fieldbus HSE արձանագրությունը կամ ավելի տարածվածը, օրինակ՝ Modbus TCP-ն:
Արդյունաբերական անջատիչներն օգտագործվում են HSE ցանց կառուցելիս: Արձանագրությունը թույլ է տալիս օղակաձև ավելորդություն: Այս դեպքում հարկ է հիշել, որ օղակաձև տոպոլոգիայում անջատիչները պետք է օգտագործեն ավելորդության արձանագրություններից մեկը (RSTP, MRP կամ ընդլայնված օղակաձև ավելորդություն)՝ կախված ցանցի չափից և պահանջվող կոնվերգենցիայի ժամանակից, երբ կապի ալիքները խափանված են:
HSE-ի վրա հիմնված համակարգերի ինտեգրումը երրորդ կողմի համակարգերի հետ հնարավոր է OPC տեխնոլոգիայի միջոցով։
Պայթյունի անվտանգության ապահովման մեթոդներ
Պայթյունապաշտպան համակարգ ստեղծելու համար բավարար չէ միայն սարքավորումների պայթյունապաշտպան բնութագրերի և օբյեկտում դրանց ճիշտ տեղադրման ընտրության վրա հույս դնելը: Համակարգի ներսում յուրաքանչյուր սարք ինքնուրույն չի գործում, այլ աշխատում է մեկ ցանցի շրջանակներում: Foundation Fieldbus H1 ցանցերում տարբեր պայթյունավտանգ գոտիներում տեղակայված սարքերի միջև տեղեկատվության փոխանակումը կապված է ոչ միայն տվյալների փոխանցման, այլև էլեկտրական էներգիայի փոխանցման հետ: Մեկ գոտում ընդունելի էներգիայի քանակը կարող է անընդունելի լինել մյուսում: Հետևաբար, դաշտային ցանցերի պայթյունավտանգ անվտանգությունը գնահատելու և այն ապահովելու օպտիմալ մեթոդը ընտրելու համար կիրառվում է համակարգային մոտեցում: Նման մեթոդների շարքում ամենատարածվածը ներքին անվտանգությունն ապահովելու մեթոդներն են:
Դաշտային ավտոբուսների դեպքում ներկայումս ներքին անվտանգությունն ապահովելու մի քանի մեթոդ կա՝ ներքին անվտանգությամբ արգելապատնեշների ավանդական մեթոդը, FISCO հայեցակարգը և բարձր հզորության բեռնախցիկի (HPT) տեխնոլոգիան։
Առաջինը հիմնված է ներքին անվտանգության արգելապատնեշների օգտագործման վրա և իրականացնում է ապացուցված հայեցակարգ, որը կիրառվել է 4-20 մԱ անալոգային ազդանշանների վրա հիմնված կառավարման համակարգերում: Այս մեթոդը պարզ և հուսալի է, բայց սահմանափակում է դաշտային սարքերի էլեկտրամատակարարումը 0 և 1 գոտիների վտանգավոր տարածքներում մինչև 80 մԱ: Այս դեպքում, լավատեսական կանխատեսման համաձայն, հնարավոր է միացնել ոչ ավելի, քան 4 դաշտային սարք մեկ հատվածում՝ 20 մԱ սպառմամբ, բայց գործնականում ոչ ավելի, քան 2: Այս դեպքում համակարգը կորցնում է Foundation Fieldbus-ում առկա բոլոր առավելությունները և արդյունավետորեն հանգեցնում է կետից կետ տոպոլոգիայի, երբ դաշտային սարքերի մեծ թվով միացման համար համակարգը պետք է բաժանվի բազմաթիվ հատվածների: Այս մեթոդը նաև զգալիորեն սահմանափակում է մայրուղային մալուխի և ճյուղերի երկարությունը:
FISCO հայեցակարգը մշակվել է «Գերմանիայի ազգային չափագիտության ինստիտուտի» կողմից և ավելի ուշ ներառվել է IEC ստանդարտներում, ապա՝ GOST-ում: Դաշտային ցանցի ներքին անվտանգությունն ապահովելու համար հայեցակարգը ենթադրում է որոշակի սահմանափակումներին համապատասխանող բաղադրիչների օգտագործում: Նման սահմանափակումներ են ձևակերպված էլեկտրամատակարարման համար՝ ելքային հզորությամբ, դաշտային սարքերի համար՝ սպառված հզորությամբ և ինդուկտիվությամբ, մալուխների համար՝ դիմադրությամբ, տարողունակությամբ և ինդուկտիվությամբ: Նման սահմանափակումները կապված են այն փաստի հետ, որ ունակային և ինդուկտիվ տարրերը կարող են կուտակել էներգիա, որը արտակարգ իրավիճակում, համակարգի որևէ տարրի վնասման դեպքում, կարող է արտանետվել և առաջացնել կայծային պարպում: Բացի այդ, հայեցակարգը արգելում է ավելորդության օգտագործումը ավտոբուսային էլեկտրամատակարարման համակարգում:
FISCO-ն վտանգավոր տարածքում սարքերի սնուցման համար ապահովում է ավելի բարձր հոսանք՝ համեմատած դաշտային արգելապատնեշային մեթոդի հետ։ Այստեղ հասանելի է 115 մԱ, որը կարող է օգտագործվել մեկ հատվածում 4-5 սարք սնուցելու համար։ Սակայն, կան նաև սահմանափակումներ գլխավոր մալուխի և ճյուղերի երկարության վերաբերյալ։
Բարձր հզորության մայրուղային տեխնոլոգիան ներկայումս ամենատարածված տեխնոլոգիան է Foundation Fieldbus ցանցերում ներքին անվտանգությունն ապահովելու համար, քանի որ այն չունի այն թերությունները, որոնք գոյություն ունեն արգելապատնեշներով պաշտպանված կամ FISCO-ի համաձայն կառուցված ցանցերում: Բարձր հզորության հաղորդալարերի (HPT) կիրառմամբ հնարավոր է հասնել դաշտային սարքերի վերջնական արժեքին ցանցային հատվածում:
Տեխնոլոգիան չի սահմանափակում ցանցի էլեկտրական պարամետրերը, որտեղ դա անհրաժեշտ չէ, օրինակ՝ գլխավոր կապի գծի վրա, որտեղ սարքավորումների սպասարկման և փոխարինման կարիք չկա: Պայթուցիկ գոտում տեղակայված դաշտային սարքերը միացնելու համար օգտագործվում են դաշտային արգելապատնեշների ֆունկցիոնալությամբ ինտերֆեյսային սարքեր, որոնք սահմանափակում են ցանցի էլեկտրական պարամետրերը սենսորների սնուցման համար և տեղակայված են անմիջապես կառավարման օբյեկտի կողքին: Այս դեպքում ամբողջ հատվածում օգտագործվում է Ex e պայթյունապաշտպանության տեսակը (բարձրացված պաշտպանություն):
Source: www.habr.com
