


Questo articolo apre un ciclo di articoli dedicati ai metodi automatizzati di configurazione dei regolatori PID nell'ambiente Simulink. Oggi scopriremo come lavorare con l'applicazione PID Tuner.
Introduzione
Il tipo di regolatori più popolare utilizzato nell'industria nei sistemi di controllo a circuito chiuso sono i regolatori PID. E mentre la struttura e il principio di funzionamento del controllore sono ben noti agli ingegneri fin dai tempi universitari, la sua configurazione, cioè il calcolo dei coefficienti del regolatore, è ancora un problema. Esiste una vasta quantità di letteratura, sia straniera (ad esempio, [1, 2]) che nazionale (ad esempio, [3, 4]), che spiega la configurazione dei regolatori in un linguaggio abbastanza complesso di teoria del controllo automatico.
In questa serie di articoli verranno descritti metodi automatizzati di configurazione dei regolatori PID utilizzando gli strumenti dell'ambiente Simulink, come:
- PID Tuner,
- Response Optimizer,
- Control System Tuner,
- Frequency Response Based PID Tuner,
- Closed-Loop PID Autotuner.
Il sistema di controllo utilizzerà un attuatore elettrico basato su un motore a corrente continua con eccitazione da magneti permanenti, funzionante insieme a un riduttore per carichi inerziali, con i seguenti parametri:
- tensione di alimentazione del motore,
 ;
; - resistenza attiva dell'avvolgimento dell'ancora del motore, ;
- resistenza induttiva dell'avvolgimento dell'ancora del motore, ;
- coefficiente di coppia del motore, ;
- momento d'inerzia del rotore del motore, .
 ;
;  ;
;  ;
;  ;
;  .
.Parametri del carico e del riduttore:
- momento d'inerzia del carico, ;
- rapporto di trasmissione del riduttore, .
 ;
;  .
.Gli articoli contengono poche formule matematiche, tuttavia è preferibile che il lettore abbia conoscenze di base nella teoria del controllo automatico e abbia esperienza di modellizzazione nell'ambiente Simulink per comprendere il materiale proposto.
Modello del sistema
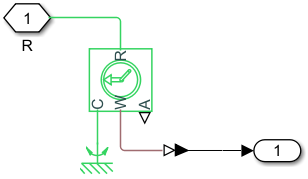
Consideriamo un sistema di controllo lineare per la velocità angolare di un attuatore elettrico di seguimento, la cui schema strutturale semplificato è rappresentato qui sotto.

In base alla struttura fornita, è stato costruito un modello di tale sistema nell'ambiente Simulink.

I modelli degli attuatori elettrici (sottosistema Electric actuator) e del carico inerziale (sottosistema Load) sono creati utilizzando moduli della libreria di modellazione fisica :
- modello dell'attuatore elettrico,
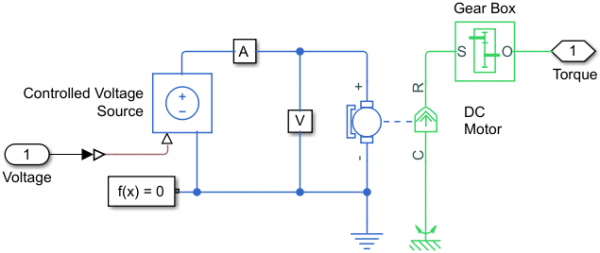
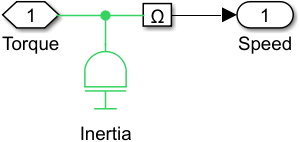
- modello del carico inerziale.
I modelli dell'attuatore elettrico e del carico includono anche sottosistemi di sensori per diverse grandezze fisiche:
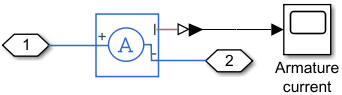
- corrente che scorre nel avvolgimento dell'armatura del motore (sottosistema A),
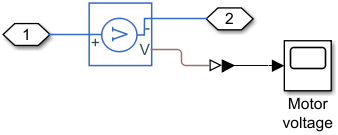
- tensione nei suoi avvolgimenti (sottosistema V),
- velocità angolare dell'oggetto controllato (sottosistema Ω).
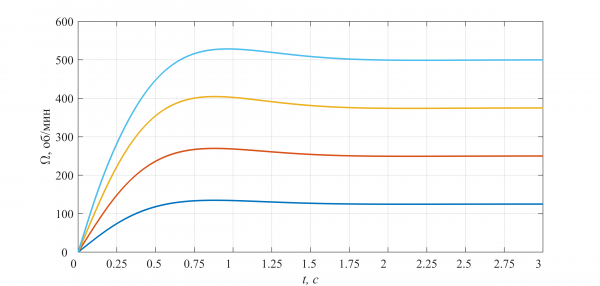
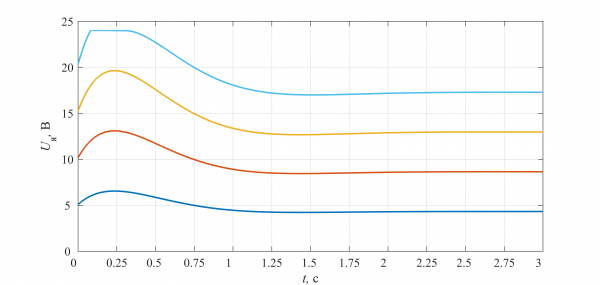
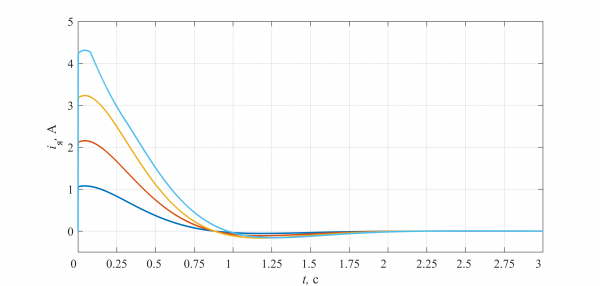
Prima di configurare i parametri del controllore PID, avviamo il modello per il calcolo, assumendo la funzione di trasferimento del controllore  . I risultati della simulazione con un segnale d'ingresso di 150 RPM sono mostrati di seguito.
. I risultati della simulazione con un segnale d'ingresso di 150 RPM sono mostrati di seguito.
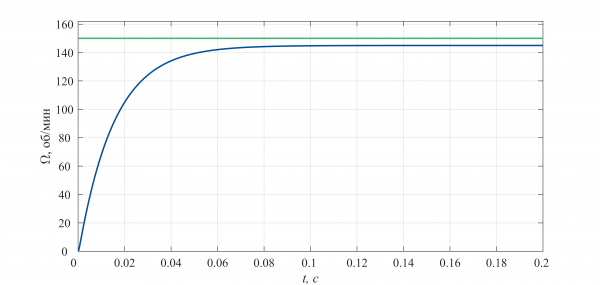
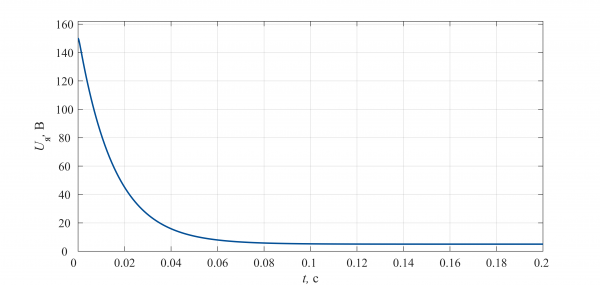
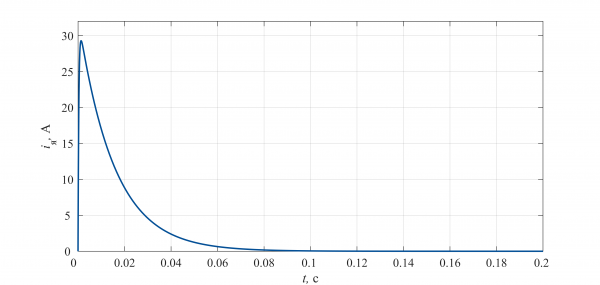
Dall'analisi dei grafici sopra riportati, si può osservare che:
- La coordinata di uscita del sistema di controllo non raggiunge il valore desiderato, cioè nel sistema è presente un errore statico.
- La tensione sugli avvolgimenti del motore raggiunge il valore di 150 V all'inizio della simulazione, il che potrebbe portare al suo guasto a causa della tensione applicata superiore a quella nominale (24 V).
La reazione del sistema a un impulso unitario deve rispettare i seguenti requisiti:
- sovraregolazione (Overshoot) non superiore al 10%,
- tempo di salita (Rise time) inferiore a 0,8 s,
- tempo di assestamento (Settling time) inferiore a 2 s.
Inoltre, il regolatore deve limitare la tensione applicata all'avvolgimento del motore al valore della tensione di alimentazione.
Regolatore configurabile
La configurazione dei parametri del regolatore avviene tramite lo strumento , che è accessibile direttamente nella finestra delle impostazioni del blocco PID Controller.
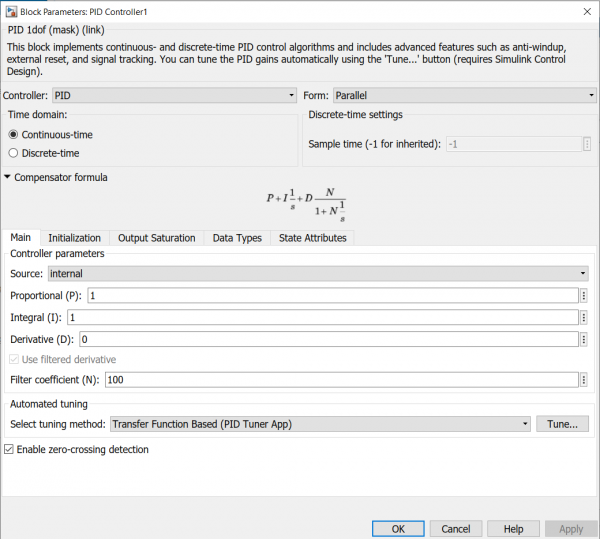
L'applicazione viene avviata premendo il pulsante Tune…, situato nel pannello Automated tuning. È importante notare che, prima di eseguire la fase di configurazione dei parametri del regolatore, è necessario selezionare il suo tipo (P, PI, PD, ecc.) e anche il suo formato (analogico o discreto).
Poiché uno dei requisiti è limitare la sua coordinata di uscita (tensione sull'avvolgimento del motore), è necessario specificare l'intervallo di tensione consentito. Per fare ciò:
- Passiamo alla scheda Output Saturation.
- Facciamo clic sul pulsante selettore Limit output, il che attiva i campi per impostare il limite superiore (Upper limit) e il limite inferiore (Lower limit) dell'intervallo della grandezza in uscita.
- Impostiamo i limiti dell'intervallo.
Il corretto funzionamento del blocco regolatore all'interno del sistema richiede l'uso di metodi mirati a combattere la saturazione integrale. Nel blocco sono implementati due metodi: back-calculation e clamping. Maggiori informazioni su questi metodi sono disponibili . Il menu a discesa per la scelta del metodo si trova sulla barra Anti-windup.
Nel caso in esame, registriamo i valori 24 e -24 nei campi Upper limit e Lower limit rispettivamente, e utilizziamo il metodo clamping per escludere la saturazione integrale.
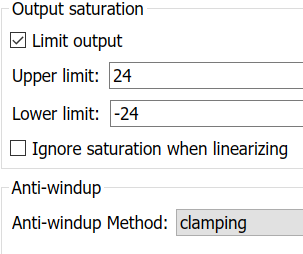
Si può notare che l'aspetto del blocco regolatore è cambiato: è apparso un segno di saturazione accanto alla porta di uscita del blocco.
Successivamente, confermando tutte le modifiche premendo il tasto Applica, torniamo alla scheda Main e facciamo clic sul pulsante Tune…, il che aprirà una nuova finestra dell'applicazione PIDTuner.
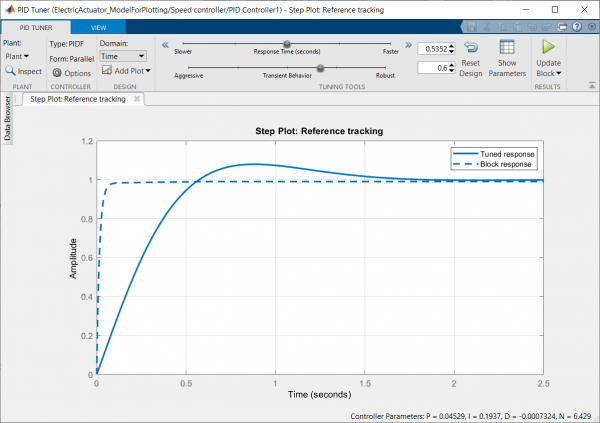
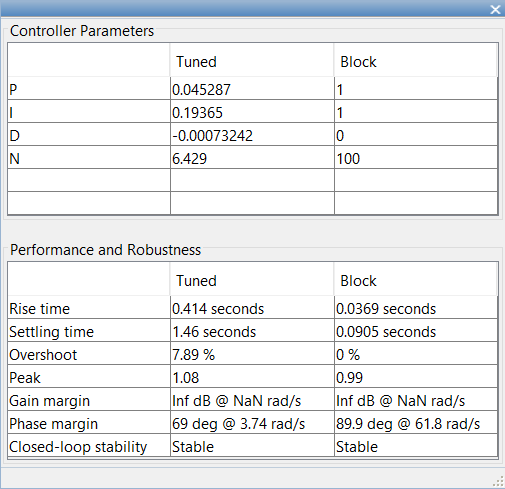
Nell'area grafica della finestra vengono visualizzati due processi di transizione: con i parametri attuali del regolatore, cioè per un regolatore non ottimizzato, e con i valori ottimizzati automaticamente. I nuovi valori dei parametri possono essere visualizzati premendo il pulsante Mostra Parametri, situato sulla barra degli strumenti. Premendo il pulsante appariranno due tabelle: i parametri ottimizzati del regolatore (Controller Parameters) e le stime delle caratteristiche del processo di transizione con i parametri ottimizzati (Performance and Robustness).
Come si vede dai valori della seconda tabella, i coefficienti del regolatore calcolati automaticamente soddisfano tutti i requisiti.
La configurazione del regolatore si conclude premendo il pulsante con il triangolo verde, situato a destra del pulsante Mostra Parametri, dopo di che i nuovi valori dei parametri si aggiorneranno automaticamente nei campi corrispondenti nella finestra di configurazione del blocco PID Controller.
I risultati della simulazione del sistema con il regolatore ottimizzato per diversi segnali d'ingresso sono mostrati di seguito. Con elevati livelli di segnali d'ingresso (linea blu) il sistema funzionerà in modalità di saturazione della tensione.
È importante notare che lo strumento PID Tuner seleziona i coefficienti del regolatore in base a un modello lineare, quindi quando si passa a un modello non lineare è necessario affinare i suoi parametri. In questo caso, si può usare l'applicazione .
Letteratura
- Manuale di regole per la messa a punto di controllori PI e PID. Aidan O’Dwyer
- Progettazione di sistemi di controllo PID e messa a punto automatica usando MATLAB, Simulink. Wang L.
- Controllo PID in forma non rigorosa. Karpov V.E.
- Controllori PID. Questioni di implementazione. Parti 1, 2. Denisensko V.
Fonte: habr.com
