


abbiamo parlato di come funzionano bus e protocolli nell'automazione industriale. Questa volta ci concentreremo sulle moderne soluzioni di lavoro: vedremo quali protocolli vengono utilizzati nei sistemi di tutto il mondo. Consideriamo le tecnologie delle aziende tedesche Beckhoff e Siemens, dell'austriaca B&R, dell'americana Rockwell Automation e della russa Fastwel. Studieremo anche soluzioni universali e non legate ad uno specifico produttore, come EtherCAT e CAN.
A fine articolo sarà presente una tabella comparativa con le caratteristiche dei protocolli EtherCAT, POWERLINK, PROFINET, EtherNet/IP e ModbusTCP.
Non abbiamo incluso nella revisione i protocolli PRP, HSR, OPC UA e altri perché Ci sono già ottimi articoli su Habré scritti dai nostri colleghi ingegneri che stanno sviluppando sistemi di automazione industriale. Per esempio, и .
Innanzitutto definiamo la terminologia: Industrial Ethernet = rete industriale, Fieldbus = bus di campo. Nell'automazione industriale russa si fa confusione tra il bus di campo e la rete industriale subordinata. Spesso questi termini sono combinati in un unico, vago concetto chiamato "livello inferiore", a cui ci si riferisce sia come bus di campo che come bus di sottolivello, sebbene possa non essere affatto un bus.
Perché è così?Questa confusione è molto probabilmente dovuta al fatto che in molti controllori moderni la connessione dei moduli I/O viene spesso implementata utilizzando un backplane o un bus fisico. Ciò significa che determinati contatti e connettori del bus vengono utilizzati per combinare più moduli in un'unica unità. Ma tali nodi, a loro volta, possono essere interconnessi sia tramite una rete industriale che tramite un bus di campo. Nella terminologia occidentale esiste una divisione netta: una rete è una rete, un autobus è un autobus. Il primo viene indicato con il termine Industrial Ethernet, il secondo con Fieldbus. L'articolo propone di utilizzare rispettivamente il termine “rete industriale” e il termine “bus di campo” per questi concetti.
Standard di rete industriale EtherCAT, sviluppato da Beckhoff
Il protocollo EtherCAT e la rete industriale sono forse oggi uno dei metodi più veloci di trasmissione dati nei sistemi di automazione. La rete EtherCAT viene utilizzata con successo nei sistemi di automazione distribuiti, dove i nodi interagenti sono separati su lunghe distanze.
Il protocollo EtherCAT utilizza frame Ethernet standard per trasmettere i suoi telegrammi, quindi rimane compatibile con qualsiasi apparecchiatura Ethernet standard e, infatti, la ricezione e la trasmissione dei dati può essere organizzata su qualsiasi controller Ethernet, purché sia disponibile il software appropriato.

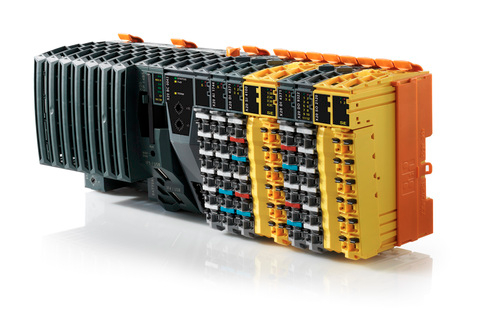
Controller Beckhoff con un set di moduli I/O. Fonte:
La specifica del protocollo è aperta e disponibile, ma solo nell'ambito dell'associazione di sviluppo - EtherCAT Technology Group.
Ecco come funziona EtherCAT (lo spettacolo è affascinante, come il gioco Zuma Inca):
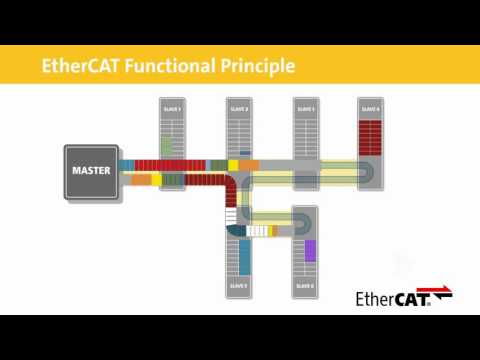
L'elevata velocità di scambio in questo protocollo - e possiamo parlare di unità di microsecondi - è dovuta al fatto che gli sviluppatori si sono rifiutati di scambiare utilizzando telegrammi inviati direttamente a un dispositivo specifico. Invece, alla rete EtherCAT viene inviato un telegramma indirizzato a tutti i dispositivi contemporaneamente, ciascuno dei nodi slave per la raccolta e la trasmissione delle informazioni (spesso chiamati anche OSO - dispositivo di comunicazione oggetto) ne prende "al volo" i dati che gli erano destinati e inserisce in un telegramma i dati che è pronto a fornire per lo scambio. Il telegramma viene quindi inviato al nodo slave successivo, dove avviene la stessa operazione. Dopo aver attraversato tutti i dispositivi di controllo, il telegramma viene restituito al controllore principale che, sulla base dei dati ricevuti dai dispositivi slave, implementa la logica di controllo, interagendo nuovamente attraverso il telegramma con i nodi slave, che emettono un segnale di controllo a l'equipaggiamento.
Una rete EtherCAT può avere qualsiasi topologia, ma in sostanza sarà sempre un anello, grazie all'utilizzo della modalità full duplex e di due connettori Ethernet. In questo modo il telegramma verrà trasmesso sempre in sequenza ad ogni dispositivo presente sul bus.
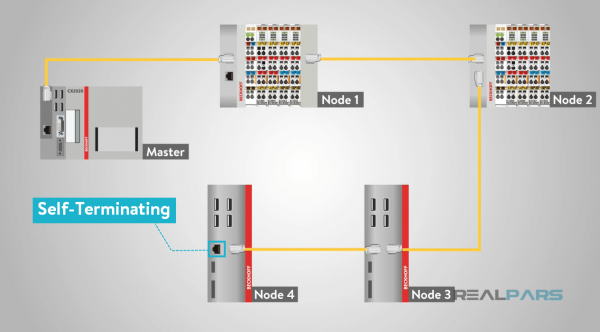
Rappresentazione schematica di una rete Ethercat con più nodi. Fonte:
La specifica EtherCAT non contiene tra l'altro restrizioni sul livello fisico 100Base-TX, quindi l'implementazione del protocollo è possibile sulla base di linee gigabit e ottiche.
Reti industriali aperte e standard Profibus/NET di Siemens
L'azienda tedesca Siemens è nota da tempo per i suoi controllori logici programmabili (PLC), utilizzati in tutto il mondo.
Lo scambio di dati tra i nodi di un sistema automatizzato controllato da apparecchiature Siemens avviene sia tramite un bus di campo chiamato Profibus sia nella rete industriale PROFINET.
Il bus Profibus utilizza uno speciale cavo bipolare con connettori DB-9. Siemens ce l'ha in viola, ma ne abbiamo visti altri nella pratica :). Per connettere più nodi, un connettore può collegare due cavi. Ha anche un interruttore per la resistenza terminale. La resistenza terminale deve essere accesa ai dispositivi terminali della rete, indicando così che questo è il primo o l'ultimo dispositivo, e dopo di esso non c'è nulla, solo oscurità e vuoto (tutti gli RS485 funzionano così). Se si accende una resistenza sul connettore intermedio, la sezione successiva verrà spenta.

Cavo Profibus con connettori di collegamento. Fonte:
La rete PROFINET utilizza un cavo analogico a doppino intrecciato, solitamente con connettori RJ-45, il cavo è di colore verde. Se la topologia di Profibus è un bus, la topologia della rete PROFINET può essere qualsiasi cosa: un anello, una stella, un albero o tutto insieme.
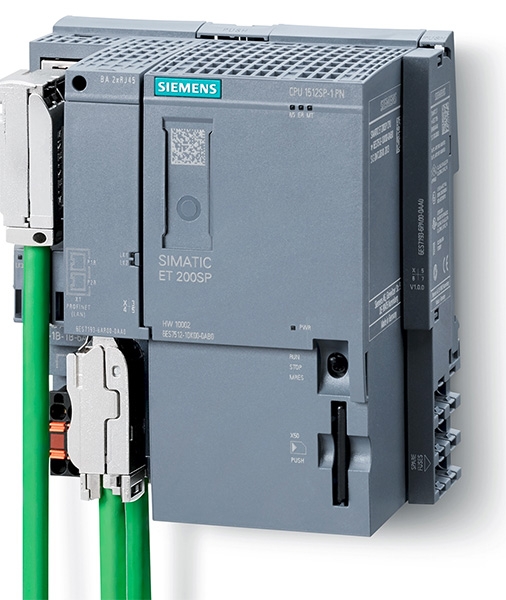
Controller Siemens con cavo PROFINET collegato. Fonte: w3.siemens.com
Esistono diversi protocolli di comunicazione sul bus Profibus e nella rete PROFINET.
Per PROFIBUS:
- Profibus DP - l'implementazione di questo protocollo prevede la comunicazione con dispositivi slave remoti; nel caso di PROFINET questo protocollo corrisponde al protocollo PROFINET IO.
- Il Profibus PA è essenzialmente identico al Profibus DP, utilizzato solo per versioni a prova di esplosione della trasmissione dati e dell'alimentazione (analogo al Profibus DP con proprietà fisiche diverse). Per PROFINET non esiste ancora un protocollo antideflagrante simile a Profibus.
- Profibus FMS - progettato per lo scambio di dati con sistemi di altri produttori che non possono utilizzare Profibus DP. L'analogo del Profibus FMS nella rete PROFINET è il protocollo PROFINET CBA.
Per PROFINET:
- PROFINET-IO;
- PROFINETACBA.
Il protocollo PROFINET IO è suddiviso in diverse classi:
- PROFINET NRT (non in tempo reale) viene utilizzato in applicazioni in cui la temporizzazione non è critica. Utilizza il protocollo di trasferimento dati Ethernet. TCP/IP, nonché UDP/IP.
- PROFINET RT (tempo reale): qui lo scambio di dati I/O viene realizzato tramite frame Ethernet, i dati di diagnostica e comunicazione vengono comunque trasmessi tramite UDP/IP.
- PROFINET IRT (Isochronous Real Time) - Questo protocollo è stato sviluppato appositamente per applicazioni di motion control e prevede una fase di trasferimento dati isocrona.
Per quanto riguarda l'implementazione del protocollo hard real-time PROFINET IRT, per le comunicazioni con dispositivi remoti si distinguono due canali di scambio: isocrono e asincrono. Un canale isocrono con durata del ciclo di scambio fissa utilizza la sincronizzazione dell'orologio e trasmette dati critici in termini di tempo; per la trasmissione vengono utilizzati telegrammi di secondo livello. La durata della trasmissione in un canale isocrono non supera 1 millisecondo.
Il canale asincrono trasmette i cosiddetti dati in tempo reale, anch'essi indirizzati tramite un indirizzo MAC. Inoltre, vengono trasmesse anche diverse informazioni diagnostiche e ausiliarie. TCP/IPNaturalmente, né i dati in tempo reale né, soprattutto, altre informazioni possono interrompere il ciclo isocrono.
L'insieme esteso di funzioni PROFINET IO non è necessario per ogni sistema di automazione industriale, quindi questo protocollo è adattato a un progetto specifico, tenendo conto delle classi di conformità o classi di conformità: CC-A, CC-B, CC-CC. Le classi di conformità consentono di selezionare dispositivi di campo e componenti backbone con la funzionalità minima richiesta.
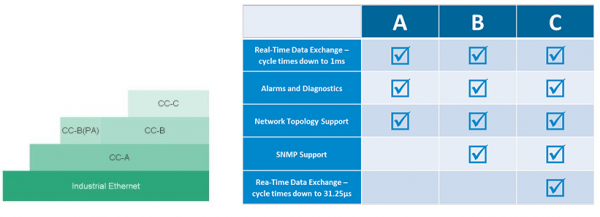
Fonte:
Il secondo protocollo di scambio nella rete PROFINET - PROFINET CBA - viene utilizzato per organizzare la comunicazione industriale tra apparecchiature di diversi produttori. L'unità di produzione principale nei sistemi IAS è una certa entità chiamata componente. Questo componente è solitamente una raccolta di parti meccaniche, elettriche ed elettroniche di un dispositivo o installazione, nonché il software applicativo associato. Per ogni componente viene selezionato un modulo software che contiene una descrizione completa dell'interfaccia di questo componente secondo i requisiti dello standard PROFINET. Successivamente questi moduli software vengono utilizzati per scambiare dati con i dispositivi.
Protocollo B&R Ethernet POWERLINK
Il protocollo Powerlink è stato sviluppato dall'azienda austriaca B&R all'inizio degli anni 2000. Questa è un'altra implementazione di un protocollo in tempo reale sopra lo standard Ethernet. La specifica del protocollo è disponibile e distribuita liberamente.
La tecnologia Powerlink utilizza un cosiddetto meccanismo di polling misto, in cui tutta l'interazione tra i dispositivi è suddivisa in più fasi. I dati particolarmente critici vengono trasmessi nella fase di scambio isocrono, per la quale è configurato il tempo di risposta richiesto; i restanti dati verranno trasmessi, quando possibile, nella fase asincrona.
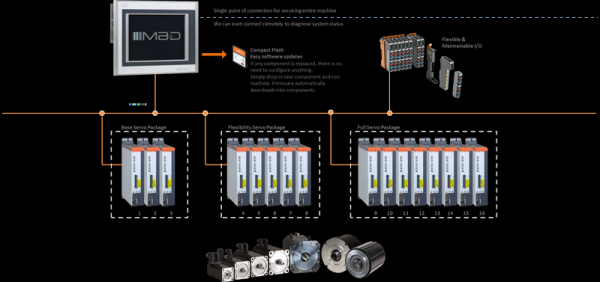
Controller B&R con un set di moduli I/O. Fonte: br-automation.com
Il protocollo è stato originariamente implementato sul livello fisico 100Base-TX, ma in seguito è stata sviluppata un'implementazione gigabit.
Il protocollo Powerlink utilizza un meccanismo di pianificazione della comunicazione. Alla rete viene inviato un determinato contrassegno o messaggio di controllo, con l'aiuto del quale viene determinato quale dei dispositivi ha attualmente il permesso di scambiare dati. Solo un dispositivo alla volta può avere accesso allo scambio.
Rappresentazione schematica di una rete Ethernet POWERLINK con più nodi.
Nella fase isocrona, il controller di polling invia sequenzialmente una richiesta a ciascun nodo da cui deve ricevere dati critici.
La fase isocrona viene eseguita, come già accennato, con un tempo di ciclo regolabile. Nella fase asincrona dello scambio viene utilizzato lo stack di protocolli IP, il controller richiede dati non critici a tutti i nodi, che inviano una risposta non appena ottengono l'accesso per trasmettere alla rete. Il rapporto temporale tra la fase isocrona e quella asincrona può essere regolato manualmente.
Protocollo Ethernet/IP di Rockwell Automation
Il protocollo EtherNet/IP è stato sviluppato con la partecipazione attiva dell'azienda americana Rockwell Automation nel 2000. Utilizza lo stack TCP e UDP IP e lo estende per l'uso nell'automazione industriale. La seconda parte del nome, contrariamente alla credenza popolare, non sta per Internet Protocol, ma per Industrial Protocol. UDP IP utilizza lo stack di comunicazione CIP (Common Interface Protocol), che è utilizzato anche nelle reti ControlNet/DeviceNet ed è implementato sopra TCP/IP.
La specifica EtherNet/IP è pubblicamente disponibile e liberamente disponibile. La topologia della rete Ethernet/IP può essere arbitraria e includere anello, stella, albero o bus.
Oltre alle funzioni standard dei protocolli HTTP, FTP, SMTP, EtherNet/IP, realizza il trasferimento di dati con criticità temporale tra il controller di polling e i dispositivi I/O. La trasmissione dei dati non critici in termini di tempo avviene tramite pacchetti TCP, mentre la consegna dei dati di controllo ciclici con tempi critici avviene tramite il protocollo UDP.
Per sincronizzare l'ora nei sistemi distribuiti, EtherNet/IP utilizza il protocollo CIPsync, che è un'estensione del protocollo di comunicazione CIP.
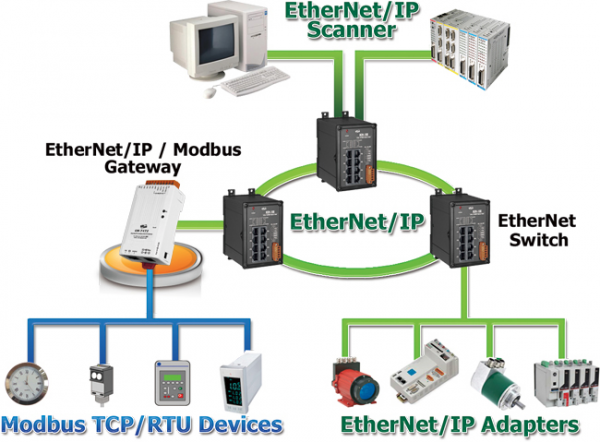
Rappresentazione schematica di una rete Ethernet/IP con più nodi e collegamento di dispositivi Modbus. Fonte:
Per semplificare la configurazione della rete EtherNet/IP, la maggior parte dei dispositivi di automazione standard sono dotati di file di configurazione predefiniti.
Implementazione del protocollo FBUS presso Fastwel
Abbiamo pensato a lungo se includere in questo elenco la società russa Fastwel con la sua implementazione nazionale del protocollo industriale FBUS, ma poi abbiamo deciso di scrivere un paio di paragrafi per una migliore comprensione delle realtà della sostituzione delle importazioni.
Esistono due implementazioni fisiche di FBUS. Uno di questi è un bus in cui il protocollo FBUS viene eseguito sopra lo standard RS485. Inoltre esiste un'implementazione di FBUS in una rete Ethernet industriale.
FBUS difficilmente può essere definito un protocollo ad alta velocità; il tempo di risposta dipende fortemente dal numero di moduli I/O sul bus e dai parametri di scambio, tipicamente compresi tra 0,5 e 10 millisecondi. Un singolo nodo slave FBUS può contenere solo 64 moduli I/O. Per un bus di campo, la lunghezza del cavo non può superare 1 metro, quindi i sistemi distribuiti sono fuori discussione. Beh, lo è, ma solo quando si utilizza una rete FBUS industriale su TCP/IP, il che significa un aumento di diverse volte del tempo di polling. È possibile utilizzare estensori di bus per collegare i moduli, consentendo un comodo posizionamento nell'armadio di automazione.
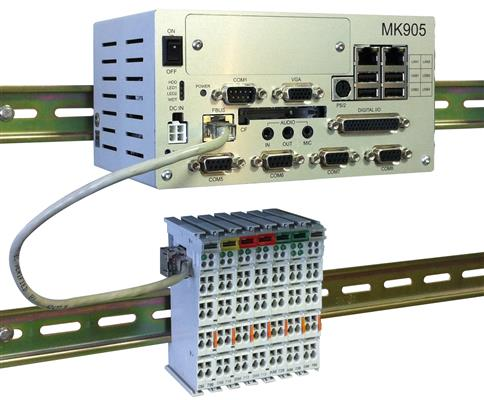
Controller Fastwel con moduli I/O collegati. Fonte:
Totale: come tutto questo viene utilizzato concretamente nei sistemi automatizzati di controllo dei processi
Naturalmente, la varietà dei tipi di moderni protocolli di trasferimento dati industriali è molto maggiore di quella descritta in questo articolo. Alcuni sono legati a un produttore specifico, altri, al contrario, sono universali. Quando sviluppa sistemi automatizzati di controllo del processo (APCS), l'ingegnere seleziona i protocolli ottimali, tenendo conto dei compiti e dei limiti specifici (tecnici e di bilancio).
Se parliamo della prevalenza di un particolare protocollo di scambio, possiamo fornire un diagramma dell'azienda HMS Network AB, che illustra le quote di mercato delle varie tecnologie di scambio nelle reti industriali.
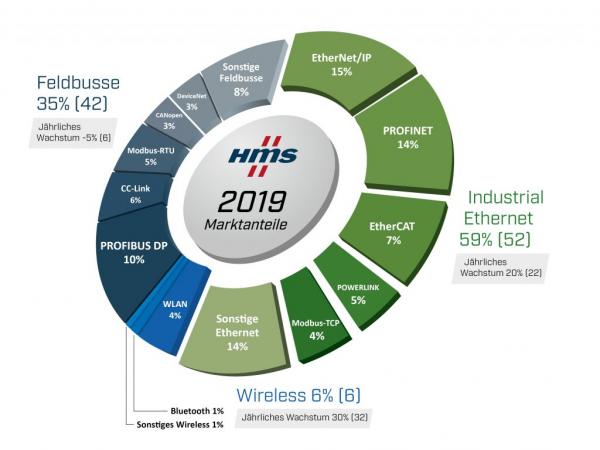
Fonte:
Come si può vedere nel diagramma, PRONET e Profibus di Siemens occupano le posizioni di punta.
È interessante notare che 6 anni fa .
Nella tabella seguente sono riportati i dati riepilogativi sui protocolli di scambio descritti. Alcuni parametri, ad esempio la prestazione, sono espressi in termini astratti: alto/basso. Gli equivalenti numerici possono essere trovati negli articoli di analisi delle prestazioni.
| EtherCAT | POWERLINK | PROFINET | EtherNet / IP | ModbusTCP |
Strato fisico | 100/1000 BASE-TX | 100/1000 BASE-TX | 100/1000 BASE-TX | 100/1000 BASE-TX | 100/1000 BASE-TX |
Livello dei dati | Canale (frame Ethernet) | Canale (frame Ethernet) | Canale (frame Ethernet), Rete/trasporto (TCP/IP) | Rete/trasporto(TCP/IP) | Rete/trasporto(TCP/IP) |
Supporto in tempo reale | Sì | Sì | Sì | Sì | No |
Производительность | Alto | Alto | IRT – alto, RT – medio | Media | basso |
Lunghezza del cavo tra i nodi | 100м | 100m/2km | 100м | 100м | 100м |
Fasi di trasferimento | No | Isocrono + asincrono | IRT – isocrono + asincrono, RT – asincrono | No | No |
Numero di nodi | 65535 | 240 | limitazione della rete TCP/IP | limitazione della rete TCP/IP | limitazione della rete TCP/IP |
Risoluzione delle collisioni | Topologia ad anello | Sincronizzazione dell'orologio, fasi di trasmissione | Topologia ad anello, fasi di trasmissione | Interruttori, topologia a stella | Interruttori, topologia a stella |
Scambio a caldo | No | Sì | Sì | Sì | A seconda dell'implementazione |
Costo dell'attrezzatura | basso | basso | Alto | Media | basso |
I campi di applicazione dei protocolli di scambio descritti, dei bus di campo e delle reti industriali sono molto diversi. Dall'industria chimica e automobilistica alla tecnologia aerospaziale e alla produzione elettronica. Nei sistemi di posizionamento in tempo reale per vari dispositivi e nella robotica sono richiesti protocolli di scambio ad alta velocità.
Con quali protocolli hai lavorato e dove li hai applicati? Condividi la tua esperienza nei commenti. 🙂
Fonte: habr.com
