

明日、サーバーを成層圏に送り込みます。 飛行中、成層圏気球はインターネットを配信し、ビデオや遠隔測定データを撮影して地上に送信します。 私たちは、プロジェクト「宇宙データセンター」(以前は「")。 私たちは約束しました - 必ず実現します! カットの下には、いくつかのハードウェアとコードがあります。
ウェブサーバー
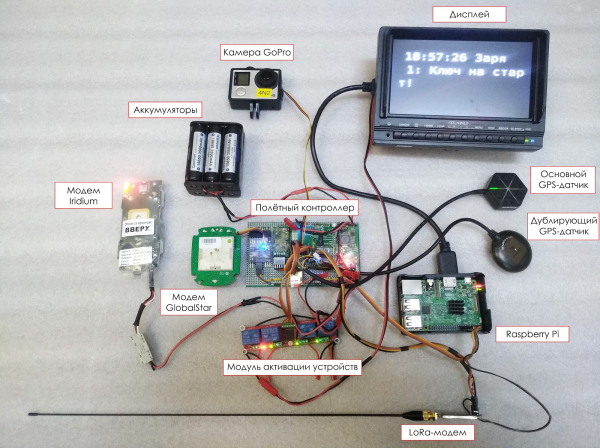
以前の「クラウド上のサーバー」プロジェクトでさえ、30 人の乗組員を乗せた本格的な気球で上昇したとき、バッテリー アセンブリを備えた本格的なサーバーを持ち歩くことは、言ってみれば合理的ではありませんでした。 そして今、私たちは小さな成層圏気球について話していますが、これは1kmではなくXNUMXkmまで上昇する必要があります。したがって、Webサーバーとして同じRaspberry Piを選択しました。 このマイコンは HTML ページを生成し、別のディスプレイに表示します。
衛星通信
Raspberry に加えて、Iridium および Globalstar 衛星通信ネットワークのモデムも搭載されます。 ご記憶のとおり、当社では国内ゴネッツネットワーク用のモデムを追加する予定でしたが、事前に受け取る時間がなかったため、次の便でお送りすることになりました。 衛星モデムを介して Web サーバーはメッセージを受信し、次の宛先に送信できます。 。 これらのメッセージは Raspberry Pi に送信され、Raspberry Pi でキューに入れられ、HTML ページに表示されます。
重要な点: ロシア語のテキスト メッセージの長さの制限は 58 文字 (スペースを含む) です。 メッセージが長い場合は、送信中に切断されます。 また、すべての特殊文字がテキストから切り取られます。たとえば、 /+$%&;''""<>n など。
Raspberry Pi には UART ポートが XNUMX つしかないため、中間ハブを介して衛星モデムを接続し、中間ハブがモデムからデータを収集して Raspberry Pi に送信します。
無線モデム
Web サーバーは、ユーザーから受信したすべてのメッセージをディスプレイに表示するだけでなく、LoRa 無線モデムを介して地球に送信します。 そこで私たちは、成層圏からインターネットを配布するというアイデア (Google Loon プロジェクトへのオマージュ) をテストしたいと考えています。 もちろん、私たちの成層圏気球は本格的な通信中継器ではありませんが、その能力が情報の大きな損失なしに安定したデータ送信に十分であるとしても、専用のシステムは間違いなく前宇宙からのインターネット配信に対応します。
テレメトリー
さらに、テレメトリ データを同じ HTML ページに表示する予定です。 Raspberry Pi は、別のフライト コントローラーからそれらを取得します。
ハードウェアの密閉ボックスの内側と外側の両方に設置できるさまざまなセンサーに問い合わせて、情報を山に収集し、それを精査して、尋ねる人に便利な形式で提供します。 私たちの場合は、Raspberry Pi を要求します。 気圧、高度、GPS 座標、垂直速度、水平速度、温度を記録します。
フライト コントローラーからのデータは、次のコードを使用して長い行で送信されます。
$str = 'N:647;T:10m55s;MP.Stage:0;MP.Alt:49;MP.VSpeed:0.0;MP.AvgVSpeed:0.0;Baro.Press:1007.06;Baro.Alt:50;Baro.Temp:35.93;GPS.Coord:N56d43m23s,E37d55m68s;GPS.Home:N56d43m23s,E37d55m68s;Dst:5;GPS.HSpeed:0;GPS.Course:357;GPS.Time:11h17m40s;GPS.Date:30.07.2018;DS.Temp:[fc]=33.56;Volt:5.19,0.00,0.00,0.00,0.00,0.00,0.00,0.00';
parse_str(strtr($str, [
':' => '=',
';' => '&'
]), $result);
print_r($result);表示に便利な形式の配列に変換します。
Array
(
[N] => 647
[Т] => 10m55з
[MP_Stage] => 0
[MP_Alt] => 49
[MP_VSpeed) => 0.0
[MP_AvgVSpeed] => 0.0
[Baro Рrеss] => 1007.06
[Baro_Alt] => 50
[Baro_Temp] => 35.93
[GPS_Coord] => N56d43m23s,E37d55m68s
[GPS_Home) => N56d43m23s,E37d55m68s
[Dst] => 5
[GPS_HSpeed] => 0
[GPS_Course] => 357
[GPS_Time] => 11h17m40s
[GPS_Date] => 30.07.2018
[DS_Temp] => [fс] ЗЗ.56
[Volt] => 5.19, 0.00,0.00,0.00,0.00,0.00,0.00,0.00
)また、あなたのメッセージとともに遠隔測定データも地球にブロードキャストします。 これを行うために、発射場に受信ステーションを配備します。
ディスプレイとカメラ
サーバーが実際に衛星通信を介してメッセージを受信していること、そしてサーバーが実際に成層圏に飛んで私たちのオフィスに止まっていないことを確認できるように、テレメトリを使用してすべてのメッセージをディスプレイに表示することにしました。ゴープロ。 プロジェクトを準備する時間がほとんどなかったので (どうやってたくさんの準備ができるでしょうか?!)、Aliexpress やはんだごてをわざわざ用意せず、代わりに既製のデバイスを使用しました。 私たちのニーズには十分すぎるほどです。 HDMI経由でディスプレイをRaspberryに接続します。
また、別の無線チャンネルを介して GoPro からビデオをブロードキャストする予定ですが、それがどのように機能するかはまだ不明です。おそらく低い雲により通信範囲が大幅に減少するでしょう。 しかし、いずれにせよ、着陸した成層圏気球を見つけた後、カメラからのビデオを投稿します。そうすれば、私たちの「宇宙前データセンター」がどのようなメッセージを受信し、どの高度まで上昇したかを自分の目で確認できます。テレメトリが表示されます。同じ HTML ページ内に、さらに地平線の一部が表示されます。
食品
上記のすべての美しさは、3S4B 回路に従って組み立てられたリチウム電池の集合体 (14 個が直列、12 個が並列) によって駆動されます。 総容量は電圧XNUMXVで約XNUMXAhです。弊社の試算ではこれで十分かと思いますが、もちろん最終組み立て後に実際の消費量を測定し、必要に応じて電池を追加します。
このすべての GPS ビーコンに加えて、着陸した成層圏気球を探すために使用します。 そして、密閉ボックスはサーバーやその他のデバイスの「家」になります。

デリケートな機器を温度や圧力の変化から守ります。 同時に、放射線量も減少します。これは私たちのプロジェクトでは何の役割も果たしませんが、サーバーが成層圏を飛行する時間が短すぎるため、背景が ISS ほど高くありません。
にメッセージを送信するだけでなく、 、競争に参加して、探査機がどこに着陸するかを推測することができます。 主な賞品は、有人宇宙船ソユーズ MS-13 の打ち上げのためのバイコヌールへの旅行です。
出所: habr.com
