

鉄道における無人技術の開発はかなり昔に始まり、すでに 1957 年に郊外列車用の最初の実験用自動操縦装置が作成されました。 鉄道輸送の自動化レベルの違いを理解するために、IEC-62290-1 標準で定義されている段階が導入されています。 道路輸送とは異なり、鉄道輸送には図 4 に示す 1 段階の自動化があります。
 図 1. IEC-62290 に基づく自動化の程度
図 1. IEC-62290 に基づく自動化の程度
ロシアの鉄道網で運行されているほぼすべての列車には自動化レベル 1 に対応する安全装置が装備されています。自動化レベル 2 の列車はロシアの鉄道網で 20 年以上にわたって正常に運行されており、数千台の機関車が装備されています。 このレベルは、軌道回路から誘導チャネルを介して受信される自動機関車信号システムのスケジュールと指示を考慮して、特定のルートに沿ったエネルギー最適な列車誘導のための牽引制御およびブレーキアルゴリズムによって実装されます。 レベル 2 を使用すると、ドライバーの疲労が軽減され、エネルギー消費量が増加し、交通スケジュールの実行が正確になります。
レベル 3 は、ドライバーが運転台にいない可能性を想定しており、ビジョン システムの実装が必要です。
レベル 4 は、運転士が完全に乗車していないことを意味し、機関車 (電車) の設計に大幅な変更が必要になります。 たとえば、船上には自動スイッチが設置されており、人が乗っていないとスイッチが作動した場合、再びコックすることはできません。
現在、レベル 3 および 4 を達成するためのプロジェクトが、シーメンス、アルストム、タレス、SNCF、SBB などの世界の大手企業によって実施されています。
シーメンスは、2018年3月にInnotrans展示会で無人路面電車の分野におけるプロジェクトを発表した。 この路面電車は、2018 年から GoAXNUMX 自動化レベルでポツダムで運行されています。
 図2 シーメンスの路面電車
図2 シーメンスの路面電車
2019年、シーメンスは無人ルートの長さを2倍以上に延長した。
ロシア鉄道は、世界で最初に無人鉄道車両の開発を開始した企業の 2015 つです。 そこで、3 年にルジスカヤ駅で XNUMX 台の入換機関車の動きを自動化するプロジェクトが開始され、NIIAS JSC がプロジェクトのインテグレーターおよび基本技術の開発者としての役割を果たしました。
無人機関車の製作は複雑で複雑なプロセスであり、他の企業との協力なしには不可能です。 したがって、ルジスカヤ駅では、JSC NIIAS とともに、次のような企業が参加しています。
- 車載制御システムの開発に関しては、JSC「VNIKTI」。
- シーメンス - 操車場 (MSR-32 システム) の運用の自動化および押し車の運用の自動化に関して。
- JSC「Radioavionika」は、矢印や信号機を制御するマイクロプロセッサー連動システムのこと。
- PKB TsT - シミュレーターの作成。
- ロシア鉄道がプロジェクトコーディネーターとして就任。
最初の段階では、運転士が入換作業を組織するための通常の条件下で機関車の制御装置を使用しない、交通自動化のレベル 2 を達成することが課題でした。
従来の入換機関車の運行では、指令員から運転士に音声指令を伝え、適切なルート(矢印の向きを変えたり、信号機を点灯したり)を設定しながら交通規制を行っていました。
自動化のレベル 2 に移行すると、すべての音声通信はデジタル セキュア無線チャネル経由で送信されるコマンド システムに置き換えられました。 技術的には、ルジスカヤ駅での入換機関車の管理は次のことに基づいて構築されました。
- 統合デジタル局モデル。
- 入換機関車の動きを制御するためのプロトコル(コマンドの送信とその実行の監視)。
- 指定されたルート、矢印および信号の位置に関する情報を取得するための電気連動システムとの相互作用。
- 入換機関車用の位置決めシステム。
- 信頼性の高いデジタルラジオ。
2017 年までに、3 台の TEM-7A 入換機関車がルジスカヤ駅での時間の 95% を完全自動モードで運転し、以下の運用を実行しました。
- 指定されたルートに沿った自動移動。
- ワゴンへの自動アクセス。
- ワゴンとの自動連結。
- ワゴンを押して操車場に運び込む。
2017年には入換機関車用のビジョンシステムを構築し、緊急時の遠隔制御を導入するプロジェクトが発足した。
2017 年 3 月、JSC NIIAS の専門家は、レーダー、ライダー、カメラで構成される入換機関車用のビジョン システムの最初のプロトタイプを設置しました (図 XNUMX)。
 図 3 ビジョン システムの最初のバージョン
図 3 ビジョン システムの最初のバージョン
2017年から2018年にかけてLugaビジョンシステムのステーションでのテスト中に、次の結論が下されました。
- 鉄道には反射率の高い金属物体が多数存在するため、障害物の検出にレーダーを使用することは現実的ではありません。 背景に対する人の検出範囲は60〜70メートルを超えません。また、レーダーの角度分解能は不十分であり、約1°です。 私たちの発見はその後、SNCF (フランスの鉄道運営会社) の同僚のテスト結果によって確認されました。
- LIDAR はノイズを最小限に抑えながら非常に優れた結果をもたらします。 降雪、雨、霧の場合、オブジェクトの検出範囲は重大ではありませんが減少します。 しかし、2017 年時点では LIDAR は非常に高価であり、プロジェクトの経済的パフォーマンスに大きな影響を与えました。
- カメラはテクニカルビジョンシステムに不可欠な要素であり、検出、物体分類、遠隔制御のタスクに必要です。 夜間や厳しい気象条件での操作には、赤外線カメラ、または近赤外線範囲で動作できる拡張波長範囲を備えたカメラが必要です。
テクニカルビジョンの主なタスクは、進行方向の障害物やその他の物体を検出することであり、移動はトラックに沿って実行されるため、それを検出する必要があります。
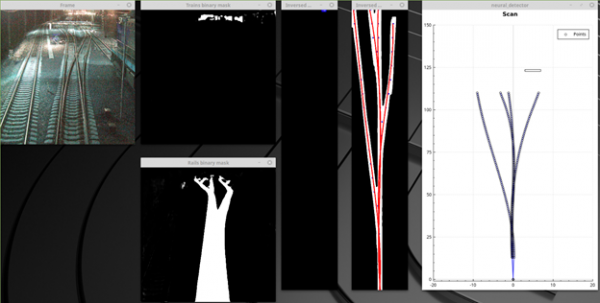 図 4. マルチクラスのセグメンテーション (線路、貨車) とバイナリ マスクを使用した線路軸の決定の例
図 4. マルチクラスのセグメンテーション (線路、貨車) とバイナリ マスクを使用した線路軸の決定の例
図 4 にトラック検出の例を示します。 矢印に沿った移動ルートを明確に決定するために、電気連動システムからデジタル無線チャネルを介して送信される、矢印の位置、信号機の読み取り値に関するアプリオリ情報が使用されます。 現在、世界の鉄道では信号機を廃止し、デジタル無線チャネルによる制御システムに切り替える傾向にあります。 これは特に高速交通の場合に当てはまります。時速 200 km を超えると、信号の表示に気づき認識することが難しくなります。 ロシアには、信号機を使用せずに運行されている XNUMX つの区間があります。これはモスクワ中央環状線とアルピカサービス - アドラー線です。
冬季には、図 5 に示すように、軌道が完全に雪で覆われ、軌道の認識がほとんど不可能になる状況が発生することがあります。
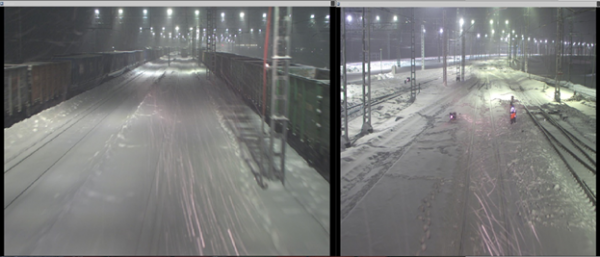 図5 雪で覆われた軌道の例
図5 雪で覆われた軌道の例
この場合、検出された物体が機関車の走行を妨げるものであるか否か、つまり走行中の物体であるかどうかが不明となる。 この場合、ルジスカヤ駅では、駅の高精度デジタル モデルと高精度車載ナビゲーション システムが使用されます。
さらに、ステーションのデジタルモデルは、基点の測地測定に基づいて作成されました。 そして、高精度測位システムによる多くの機関車の通過処理に基づいて、全線路に沿った地図が完成しました。
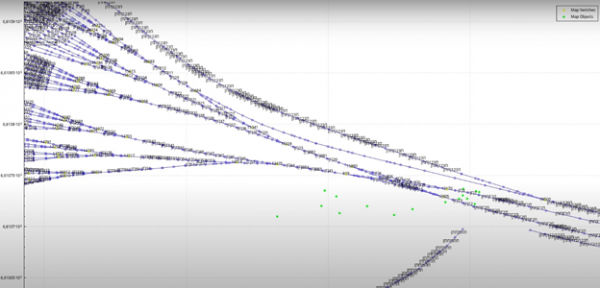 図6 ルシスコイ駅の線路開発のデジタルモデル
図6 ルシスコイ駅の線路開発のデジタルモデル
車載測位システムにとって最も重要なパラメータの 1 つは、機関車の向き (方位角) を計算する際の誤差です。 機関車の向きは、センサーとセンサーによって検出される物体の正しい向きに必要です。 方位角誤差が 100° の場合、距離 1,7 メートルでのパス軸に対するオブジェクトの座標の誤差は XNUMX メートルになります。
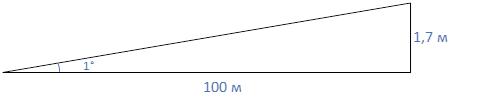 図 7 方向誤差が横座標誤差に及ぼす影響
図 7 方向誤差が横座標誤差に及ぼす影響
したがって、機関車の向きを角度で測定する際の最大許容誤差は 0,1° を超えてはなりません。 車載測位システム自体は、RTK モードの 5 つの二重周波数ナビゲーション受信機で構成されており、そのアンテナは機関車の全長に沿って間隔を置いて配置され、長いベース、ストラップダウン慣性ナビゲーション システム、およびホイール センサー (走行距離計) への接続を作成します。 入換機関車の座標を決定する標準偏差は XNUMX cm 以内です。
さらに、追加の位置データを取得するための SLAM 技術 (ライダーと視覚) の使用に関する研究がルジスカヤ駅で実施されました。
その結果、ルジスカヤ駅の入換機関車の軌間の決定は、軌間認識の結果と測位に基づくデジタル軌道モデルデータを組み合わせて行われます。
障害物の検出は、以下に基づいていくつかの方法でも実行されます。
- LIDAR データ。
- ステレオビジョンデータ。
- ニューラルネットワークの働き。
主なデータ ソースの 8 つは LIDAR であり、レーザー スキャンから点群を生成します。 運用されているアルゴリズムでは、主に古典的なデータクラスタリングアルゴリズムが使用されています。 研究の一環として、LIDAR ポイントをクラスタリングするタスク、および LIDAR データとビデオ カメラからのデータの共同処理にニューラル ネットワークを使用する有効性が確認されます。 図 XNUMX は、ルジスカヤ駅の車両の背景に人間のダミーを示す LIDAR データ (反射率が異なる点の集合体) の例を示しています。
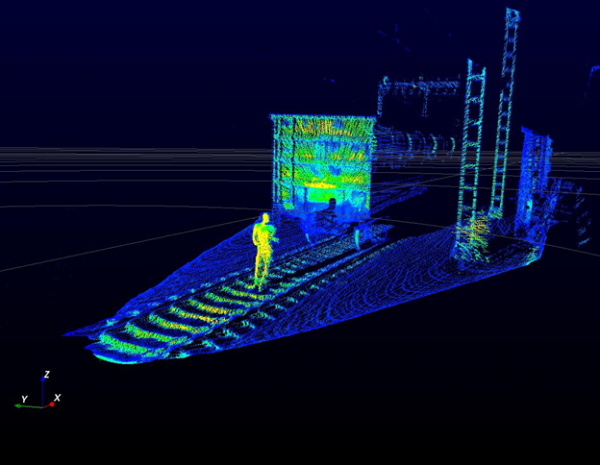 図 8. ルジスカヤ駅の LIDAR からのデータの例
図 8. ルジスカヤ駅の LIDAR からのデータの例
図 9 は、XNUMX つの異なる LIDAR のデータに従って、複雑な形状の自動車からクラスターを抽出する例を示しています。
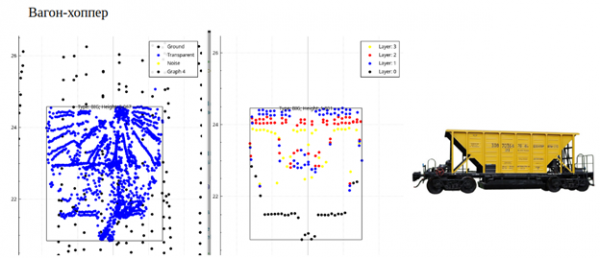 図 9. ホッパーカーからのクラスターとしての LIDAR データ解釈の例
図 9. ホッパーカーからのクラスターとしての LIDAR データ解釈の例
これとは別に、最近ライダーのコストがほぼ一桁下がり、その技術的特性が向上していることは注目に値します。 この傾向が今後も続くことは間違いありません。 ルジスカヤ駅で使用されているライダーによる物体の検知範囲は約150メートル。
障害物の検出には、異なる物理原理を用いたステレオカメラも使用されます。
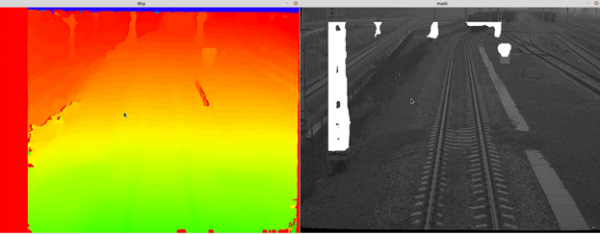 図 10. ステレオペアからの視差マップと検出されたクラスター
図 10. ステレオペアからの視差マップと検出されたクラスター
図 10 は、ポール、ウェイボックス、ワゴンを検出したステレオ カメラ データの例を示しています。
制動に十分な距離で点群の十分な精度を得るには、高解像度のカメラを使用する必要があります。 画像サイズを大きくすると、視差マップを取得するための計算コストが増加します。 占有されるリソースとシステムの応答時間に必要な条件があるため、ビデオ カメラから有用なデータを抽出するためのアルゴリズムとアプローチを常に開発およびテストする必要があります。
アルゴリズムのテストと検証の一部は、設計局 TsT が JSC NIIAS と共同で開発している鉄道シミュレーターを使用して実行されます。 たとえば、図 11 は、ステレオ カメラ アルゴリズムの動作をテストするためのシミュレーターの使用を示しています。
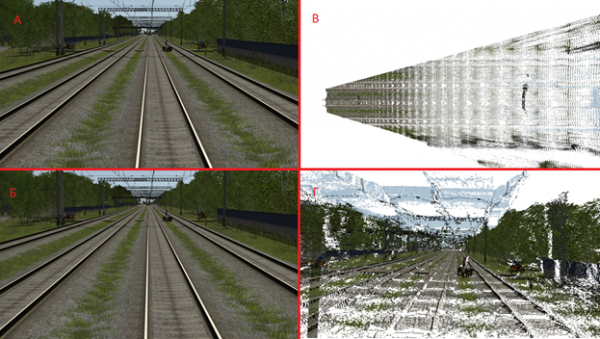 図 11. A、B - シミュレーターからの左右のフレーム。 B – ステレオカメラからのデータの再構成の上面図。 D - シミュレータからのステレオ カメラ画像の再構成。
図 11. A、B - シミュレーターからの左右のフレーム。 B – ステレオカメラからのデータの再構成の上面図。 D - シミュレータからのステレオ カメラ画像の再構成。
ニューラル ネットワークの主なタスクは、人、ワゴンの検出とそれらの分類です。
厳しい気象条件で作業するために、JSC NIIAS の専門家は赤外線カメラを使用したテストも実施しました。
 図 12. IR カメラからのデータ
図 12. IR カメラからのデータ
すべてのセンサーからのデータは関連付けアルゴリズムに基づいて統合され、障害物 (物体) の存在確率が推定されます。
さらに、途中にあるすべての物体が障害物であるわけではなく、入換作業を行う場合、機関車は自動的に車両と連結する必要があります。
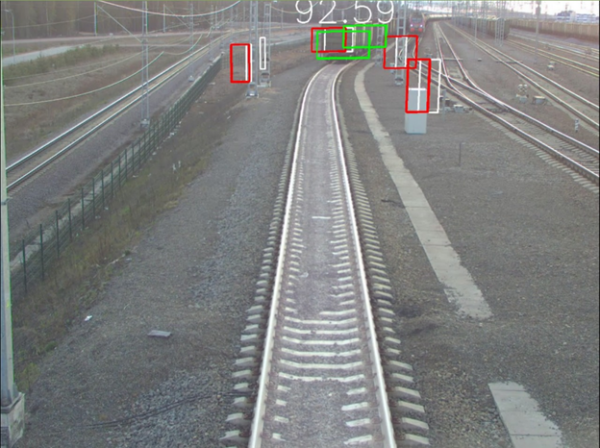 図 13. さまざまなセンサーによる障害物の検出による車の入口の視覚化の例
図 13. さまざまなセンサーによる障害物の検出による車の入口の視覚化の例
無人入換機関車を運転する場合、機器に何が起こっているのか、どのような状態にあるのかを迅速に把握することが非常に重要です。 犬などの動物が機関車の前に現れる場合もあります。 搭載されたアルゴリズムにより機関車は自動的に停止しますが、犬が邪魔にならない場合はどうすればよいでしょうか?
車内の状況を制御し、緊急事態の場合に意思決定を行うために、駅にあるすべての無人機関車と連動するように設計された固定式のリモコンおよび制御パネルが開発されました。 ルジスカヤ駅ではECポストにあります。
 図 14 リモート制御と管理
図 14 リモート制御と管理
ルジスコイ駅では、図 14 に示す制御パネルが 300 台の入換機関車の運転を制御します。 必要に応じて、このリモコンを使用して、リアルタイムで情報を送信することで、接続された機関車の XNUMX 台を制御できます (無線チャネルを介したデータ送信を考慮すると、遅延は XNUMX ミリ秒以下です)。
機能安全の問題
無人機関車の実装における最も重要な問題は、規格 IEC 61508「安全に関連する電気、電子、プログラム可能な電子システムの機能安全」(EN50126、EN50128、EN50129)、GOST 33435-2015 によって定義される機能安全の問題です。 「鉄道車両の制御・監視・安全のための装置」。
車載安全装置の要件に準拠するには、Safety Integrity Level 4 (SIL4) が必要です。
SIL-4 レベルに準拠するために、既存の機関車の安全装置はすべて多数決ロジックに従って構築されており、計算は XNUMX つのチャネル (またはそれ以上) で並行して実行され、結果を比較して決定を下します。
無人入換機関車のセンサーからのデータを処理する演算装置も、最終結果を比較する XNUMX チャネル方式に従って構築されています。
ビジョンセンサーを使用し、さまざまな気象条件や環境で作業するには、無人車両の安全性を証明するという問題に対する新しいアプローチが必要です。
2019 年に、ISO/PAS 21448 規格「道路車両。 特定機能のセキュリティ (SOTIF)。 この規格の主な原則の 2 つは、さまざまな状況におけるシステムの動作を考慮するシナリオ アプローチです。 シナリオの総数は無限大です。 主な設計目標は、既知の危険なシナリオと未知の危険なシナリオを表す領域 3 と XNUMX を最小限に抑えることです。
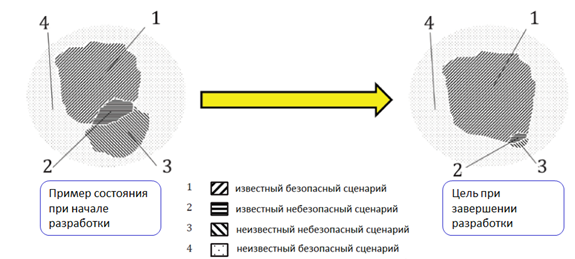 図 15 開発の結果としてのスクリプト変換
図 15 開発の結果としてのスクリプト変換
このアプローチの適用の一環として、JSC NIIAS の専門家は、2017 年の運用開始以来、新たに発生したすべての状況 (シナリオ) を分析しました。 実際の運用では対応することが難しい状況の一部は、PKB TsT シミュレーターを使用して解決されます。
規制の問題
機関車の運転台に運転士がいない完全自動制御に真に移行するには、規制の問題にも対処する必要があります。
現時点では、ロシア鉄道は鉄道車両の自動制御システム導入対策の実施に対する規制支援に関する作業の実施スケジュールを承認した。 最も重要な問題の 2021 つは、鉄道輸送における生産に関係のない国民の生命または健康に被害を与えた輸送事故の内部調査および会計処理に関する規則の更新です。 この計画に従って、XNUMX 年には無人鉄道車両の運行を規制する一連の文書が作成され、承認される予定です。
後書き
現時点では、ルジスカヤ駅で運行されている無人入換機関車の類似車両は世界中にありません。 フランス(SNCF社)、ドイツ、オランダ(Prorail社)、ベルギー(Lineas社)の専門家は、2018年から2019年に開発された制御システムを知り、そのようなシステムの実装に興味を持っています。 JSC NIIAS の主な任務の XNUMX つは、機能を拡張し、ロシアの鉄道と外国企業の両方で作成された管理システムを複製することです。
現在、ロシア鉄道もラストチカ無人電車の開発プロジェクトを主導している。 図 16 は、2 年 2019 月にフレームワーク内で行われた ES1520G Lastochka 電車用の自動制御システムのプロトタイプのデモンストレーションを示しています。 スペースXNUMXの国際鉄道サロン「PRO//Dvizhenie.Expo」。
 図16 MCCにおける無人電車の運行実証
図16 MCCにおける無人電車の運行実証
無人電車の開発は、高速性、長い制動距離、停車地点での乗客の安全な乗降の確保などの理由から、はるかに困難な作業です。 現在、MCC ではテストが活発に行われています。 このプロジェクトに関するストーリーは、近い将来公開される予定です。
出所: habr.com
