

ಗೂಗಲ್ ಒಡೆತನದ ಕಂಪನಿ ಡೀಪ್ಮೈಂಡ್, ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆಯ ಕ್ಷೇತ್ರದಲ್ಲಿನ ಬೆಳವಣಿಗೆಗಳಿಗೆ ಮತ್ತು ಮಾನವ ಮಟ್ಟದಲ್ಲಿ ಕಂಪ್ಯೂಟರ್ ಆಟಗಳನ್ನು ಆಡುವ ಸಾಮರ್ಥ್ಯವಿರುವ ನ್ಯೂರಲ್ ನೆಟ್ವರ್ಕ್ಗಳ ನಿರ್ಮಾಣಕ್ಕೆ ಹೆಸರುವಾಸಿಯಾಗಿದೆ, ಭೌತಿಕ ಪ್ರಕ್ರಿಯೆಗಳನ್ನು ಅನುಕರಿಸಲು MuJoCo (ಸಂಪರ್ಕದೊಂದಿಗೆ ಮಲ್ಟಿ-ಜಾಯಿಂಟ್ ಡೈನಾಮಿಕ್ಸ್) ಎಂಜಿನ್ನ ಆವಿಷ್ಕಾರವನ್ನು ಘೋಷಿಸಿತು. ) ಎಂಜಿನ್ ಪರಿಸರದೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುವ ಸ್ಪಷ್ಟ ರಚನೆಗಳನ್ನು ಮಾಡೆಲಿಂಗ್ ಮಾಡುವ ಗುರಿಯನ್ನು ಹೊಂದಿದೆ ಮತ್ತು ಸಿದ್ಧಪಡಿಸಿದ ಸಾಧನದ ರೂಪದಲ್ಲಿ ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ತಂತ್ರಜ್ಞಾನವನ್ನು ಅಳವಡಿಸುವ ಮೊದಲು ಹಂತದಲ್ಲಿ ರೋಬೋಟ್ಗಳು ಮತ್ತು ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆ ವ್ಯವಸ್ಥೆಗಳ ಅಭಿವೃದ್ಧಿಯಲ್ಲಿ ಸಿಮ್ಯುಲೇಶನ್ಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಕೋಡ್ ಅನ್ನು C/C++ ನಲ್ಲಿ ಬರೆಯಲಾಗಿದೆ ಮತ್ತು ಅಪಾಚೆ 2.0 ಪರವಾನಗಿ ಅಡಿಯಲ್ಲಿ ಪ್ರಕಟಿಸಲಾಗುತ್ತದೆ. ಬೆಂಬಲಿತ ವೇದಿಕೆಗಳು Linux, Windows и macOSಎಲ್ಲಾ ಪ್ರಾಜೆಕ್ಟ್-ಸಂಬಂಧಿತ ಕೋಡ್ಗಳನ್ನು ಓಪನ್ ಸೋರ್ಸ್ ಮಾಡುವ ಕೆಲಸವನ್ನು 2022 ರಲ್ಲಿ ಪೂರ್ಣಗೊಳಿಸಲು ಯೋಜಿಸಲಾಗಿದೆ, ಅದರ ನಂತರ MuJoCo ಮುಕ್ತ ಅಭಿವೃದ್ಧಿ ಮಾದರಿಗೆ ಪರಿವರ್ತನೆಗೊಳ್ಳುತ್ತದೆ, ಸಮುದಾಯದ ಸದಸ್ಯರು ಅಭಿವೃದ್ಧಿಯಲ್ಲಿ ಭಾಗವಹಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ.
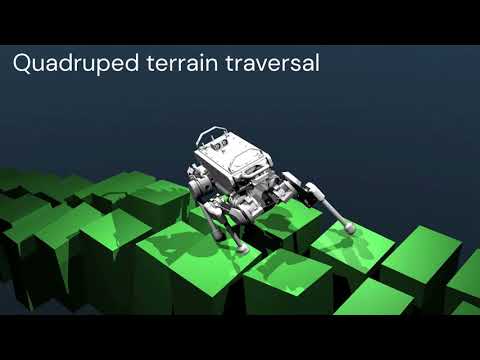
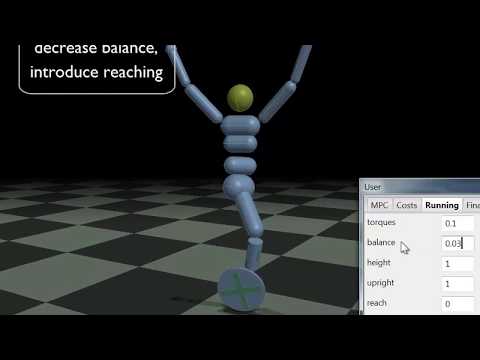
MuJoCo ಒಂದು ಗ್ರಂಥಾಲಯವಾಗಿದ್ದು, ರೋಬೋಟ್ಗಳು, ಬಯೋಮೆಕಾನಿಕಲ್ ಸಾಧನಗಳು ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆ ವ್ಯವಸ್ಥೆಗಳ ಸಂಶೋಧನೆ ಮತ್ತು ಅಭಿವೃದ್ಧಿಯಲ್ಲಿ, ಹಾಗೆಯೇ ಗ್ರಾಫಿಕ್ಸ್, ಅನಿಮೇಷನ್ ಮತ್ತು ಕಂಪ್ಯೂಟರ್ ಆಟಗಳ ರಚನೆಯಲ್ಲಿ ಬಳಸಬಹುದಾದ ಸಾಮಾನ್ಯ ಉದ್ದೇಶದ ಭೌತಿಕ ಪ್ರಕ್ರಿಯೆ ಸಿಮ್ಯುಲೇಶನ್ ಎಂಜಿನ್ ಅನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುತ್ತದೆ. ಸಿಮ್ಯುಲೇಶನ್ ಎಂಜಿನ್ ಅನ್ನು ಗರಿಷ್ಠ ಕಾರ್ಯಕ್ಷಮತೆಗಾಗಿ ಹೊಂದುವಂತೆ ಮಾಡಲಾಗಿದೆ ಮತ್ತು ಹೆಚ್ಚಿನ ನಿಖರತೆ ಮತ್ತು ಶ್ರೀಮಂತ ಸಿಮ್ಯುಲೇಶನ್ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಒದಗಿಸುವಾಗ ಕಡಿಮೆ-ಮಟ್ಟದ ವಸ್ತು ಕುಶಲತೆಯನ್ನು ಅನುಮತಿಸುತ್ತದೆ.
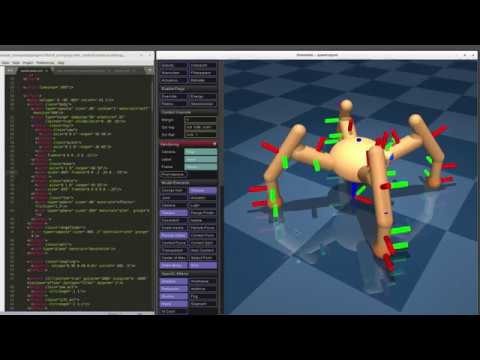
MJCF ದೃಶ್ಯ ವಿವರಣೆ ಭಾಷೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಮಾದರಿಗಳನ್ನು ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ, ಇದು XML ಅನ್ನು ಆಧರಿಸಿದೆ ಮತ್ತು ವಿಶೇಷ ಆಪ್ಟಿಮೈಜಿಂಗ್ ಕಂಪೈಲರ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ಸಂಕಲಿಸಲಾಗಿದೆ. MJCF ಜೊತೆಗೆ, ಎಂಜಿನ್ ಸಾರ್ವತ್ರಿಕ URDF (ಯುನಿಫೈಡ್ ರೋಬೋಟ್ ವಿವರಣೆ ಸ್ವರೂಪ) ನಲ್ಲಿ ಫೈಲ್ಗಳನ್ನು ಲೋಡ್ ಮಾಡುವುದನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ. MuJoCo ಸಿಮ್ಯುಲೇಶನ್ ಪ್ರಕ್ರಿಯೆಯ ಸಂವಾದಾತ್ಮಕ 3D ದೃಶ್ಯೀಕರಣಕ್ಕಾಗಿ ಮತ್ತು OpenGL ಬಳಸಿಕೊಂಡು ಫಲಿತಾಂಶಗಳ ರೆಂಡರಿಂಗ್ಗಾಗಿ GUI ಅನ್ನು ಸಹ ಒದಗಿಸುತ್ತದೆ.
ಪ್ರಮುಖ ಲಕ್ಷಣಗಳು:
- ಸಾಮಾನ್ಯೀಕರಿಸಿದ ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಸಿಮ್ಯುಲೇಶನ್, ಕೀಲುಗಳ ಉಲ್ಲಂಘನೆಯನ್ನು ಹೊರತುಪಡಿಸಿ.
- ರಿವರ್ಸ್ ಡೈನಾಮಿಕ್ಸ್, ಸಂಪರ್ಕದ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ ಸಹ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
- ನಿರಂತರ ಸಮಯದಲ್ಲಿ ನಿರ್ಬಂಧಗಳ ಏಕೀಕೃತ ಸೂತ್ರೀಕರಣಕ್ಕಾಗಿ ಪೀನ ಪ್ರೋಗ್ರಾಮಿಂಗ್ ಅನ್ನು ಬಳಸುವುದು.
- ಮೃದು ಸ್ಪರ್ಶ ಮತ್ತು ಶುಷ್ಕ ಘರ್ಷಣೆ ಸೇರಿದಂತೆ ವಿವಿಧ ನಿರ್ಬಂಧಗಳನ್ನು ಹೊಂದಿಸುವ ಸಾಮರ್ಥ್ಯ.
- ಕಣ ವ್ಯವಸ್ಥೆಗಳು, ಬಟ್ಟೆಗಳು, ಹಗ್ಗಗಳು ಮತ್ತು ಮೃದುವಾದ ವಸ್ತುಗಳ ಸಿಮ್ಯುಲೇಶನ್.
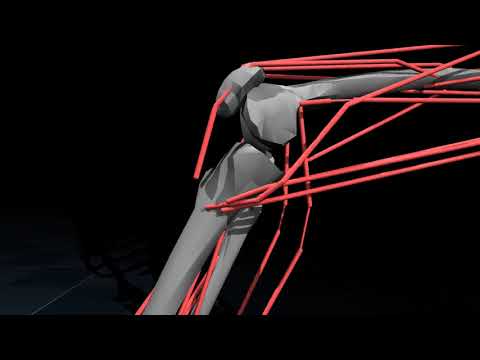
- ಮೋಟಾರುಗಳು, ಸಿಲಿಂಡರ್ಗಳು, ಸ್ನಾಯುಗಳು, ಸ್ನಾಯುಗಳು ಮತ್ತು ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಒಳಗೊಂಡಂತೆ ಕಾರ್ಯನಿರ್ವಾಹಕ ಅಂಶಗಳು (ಆಕ್ಟಿವೇಟರ್ಗಳು).
- ನ್ಯೂಟನ್ರ ವಿಧಾನಗಳು, ಸಂಯೋಜಿತ ಗ್ರೇಡಿಯಂಟ್ಗಳು ಮತ್ತು ಗಾಸ್-ಸೀಡೆಲ್ ಅನ್ನು ಆಧರಿಸಿದ ಪರಿಹಾರಗಳು.
- ಪಿರಮಿಡ್ ಅಥವಾ ದೀರ್ಘವೃತ್ತದ ಘರ್ಷಣೆ ಕೋನ್ಗಳನ್ನು ಬಳಸುವ ಸಾಧ್ಯತೆ.
- ಯೂಲರ್ ಅಥವಾ ರೂಂಜ್-ಕುಟ್ಟಾದ ಸಂಖ್ಯಾತ್ಮಕ ಏಕೀಕರಣ ವಿಧಾನಗಳ ಆಯ್ಕೆಯನ್ನು ಬಳಸುವುದು.
- ಸೀಮಿತ ವ್ಯತ್ಯಾಸಗಳ ವಿಧಾನದಿಂದ ಮಲ್ಟಿಥ್ರೆಡ್ ವಿವೇಚನೆ ಮತ್ತು ಅಂದಾಜು.

ಮೂಲ: opennet.ru
