

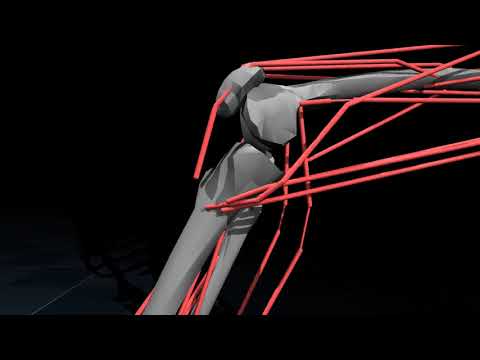
Хиймэл оюун ухаан, хүний түвшинд компьютер тоглоом тоглох чадвартай мэдрэлийн сүлжээний бүтээн байгуулалтуудаараа алдартай Google-ийн эзэмшдэг DeepMind компани физик процессыг дуурайдаг MuJoCo (Multi-Joint dynamics with Contact) хөдөлгүүрийг нээснээ зарлалаа. ). Хөдөлгүүр нь хүрээлэн буй орчинтой харьцаж буй үе мөчний бүтцийг загварчлахад чиглэгддэг бөгөөд боловсруулсан технологийг эцсийн төхөөрөмж хэлбэрээр хэрэгжүүлэхээс өмнөх шатанд робот, хиймэл оюун ухааны системийг хөгжүүлэхэд симуляцид ашигладаг.
Код нь C/C++ хэл дээр бичигдсэн бөгөөд Apache 2.0 лицензийн дагуу нийтлэгдэх болно. Дэмжигдсэн платформууд Linux, Windows и macOSТөсөлтэй холбоотой бүх кодыг нээлттэй эх сурвалжтай болгох ажлыг 2022 онд дуусгахаар төлөвлөж байгаа бөгөөд үүний дараа MuJoCo нь нээлттэй хөгжлийн загварт шилжиж, орон нутгийн гишүүдийг хөгжүүлэлтэд оролцох боломжийг олгоно.
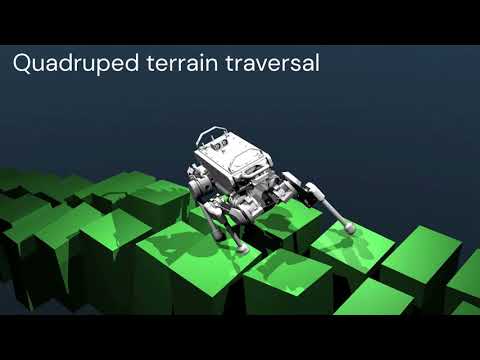
MuJoCo нь робот, биомеханик төхөөрөмж, машин сургалтын системийг судлах, хөгжүүлэх, график, хөдөлгөөнт дүрс, компьютер тоглоом бүтээхэд ашиглах боломжтой ерөнхий зориулалтын физик процессын симуляцийн хөдөлгүүрийг хэрэгжүүлдэг номын сан юм. Симуляцийн хөдөлгүүр нь дээд зэргийн гүйцэтгэлтэй байхаар оновчтой бөгөөд объектыг доод түвшний манипуляци хийх боломжийг олгодог бөгөөд өндөр нарийвчлалтай, баялаг симуляцийн чадавхийг хангадаг.
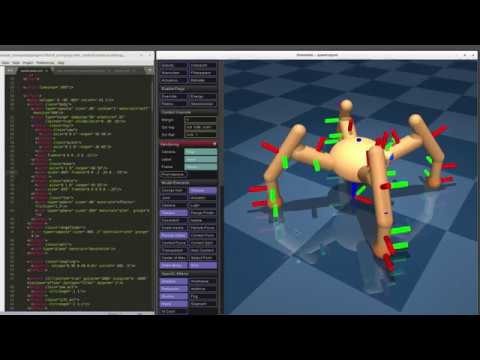
Загваруудыг XML дээр үндэслэсэн, тусгай оновчтой хөрвүүлэгч ашиглан эмхэтгэсэн MJCF үзэгдэлийн тайлбар хэлийг ашиглан тодорхойлдог. MJCF-ээс гадна хөдөлгүүр нь бүх нийтийн URDF (Robot Description Format) -д файлуудыг ачаалахыг дэмждэг. MuJoCo нь симуляцийн үйл явцыг интерактив 3D дүрслэх, OpenGL ашиглан үр дүнг үзүүлэх GUI-ээр хангадаг.
Гол давуу талууд:
- Хамтарсан зөрчлөөс бусад ерөнхий координат дахь загварчлал.
- Урвуу динамик, контакттай байсан ч илрүүлэх боломжтой.
- Тасралтгүй хугацаанд нэгдсэн хязгаарлалтыг томъёолохын тулд гүдгэр програмчлалыг ашиглах.
- Зөөлөн мэдрэгч, хуурай үрэлт зэрэг янз бүрийн хязгаарлалтыг тохируулах чадвар.
- Бөөмийн систем, даавуу, олс, зөөлөн объектын загварчлал.
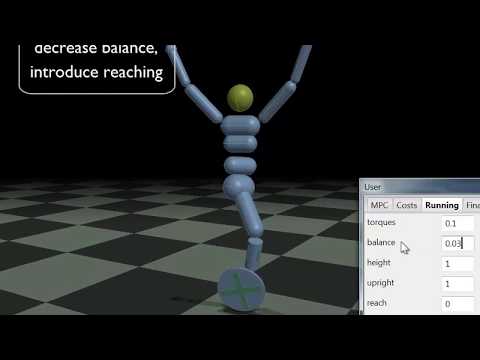
- Хөдөлгүүр, цилиндр, булчин, шөрмөс, бүлүүрт механизм зэрэг идэвхжүүлэгч (хөдөлгүүр).
- Ньютон, коньюгат градиент, Гаусс-Зайделийн аргууд дээр суурилсан уусгагч.
- Пирамид эсвэл эллипс үрэлтийн конус ашиглах боломж.
- Эйлер эсвэл Рунге-Кутта тоон интеграцийн аргуудыг ашиглана уу.
- Олон урсгалт дискретизаци ба хязгаарлагдмал зөрүүний ойролцоолсон.

Эх сурвалж: opennet.ru
