

Historia problemów
Małe firmy z jednej strony potrzebują wysokiej jakości monitoringu swojej infrastruktury (szczególnie w świetle powszechnej wirtualizacji), z drugiej strony mają trudności finansowe z zakupem nowego sprzętu. Częste są również problemy z serwerem/sprzętem: często obok stacji roboczych użytkowników lub w małej niszy/szafie znajdują się 1-3 serwery typu tower.
Łatwiej skorzystać z gotowego zestawu (dystrybucji), który wystarczy wgrać na kartę microSD i włożyć do zwykłego komputera jednopłytkowego (rodziny beaglebone, raspberry pi i orange pi, asus tinker board). Ponadto taki sprzęt jest niedrogi i można go zainstalować w dowolnym miejscu.
Stwierdzenie problemu
Projekt pod wieloma względami rozwinął się jako rodzaj pracy laboratoryjnej z możliwością zastosowania wyników.
Na system monitorowania wybrano Zabbix, ponieważ jest to potężny, darmowy i dobrze udokumentowany system.
Problem z platformą sprzętową stał się poważny. Monitorowanie osobnej maszyny też nie jest zbyt dobrym rozwiązaniem - albo zakup nowego sprzętu jest drogi, albo szukanie starego sprzętu + w małych firmach często zdarzają się problemy z serwerem/ sprzęt komputerowy.
Użycie systemu buildroot umożliwia tworzenie specjalistycznych rozwiązań, które mogą być obsługiwane przez personel dysponujący minimalną wiedzą na temat rodziny systemów operacyjnych. LinuxTen system jest przyjazny dla początkujących, a jednocześnie oferuje rozbudowane możliwości personalizacji dla doświadczonych programistów. Idealnie nadaje się do niedrogiego, a jednocześnie w pełni funkcjonalnego monitorowania infrastruktury IT, z minimalnymi wymaganiami szkoleniowymi dla personelu obsługującego.
Kroki rozwiązania
Zdecydowano się początkowo stworzyć oprogramowanie układowe dla x86_64 do działania w qemu, ponieważ jest to wygodne i szybkie rozwiązanie do debugowania. Następnie przenieś go do komputera jednopłytkowego z ramieniem (spodobała mi się płyta asus tinker board).
Jako system kompilacji wybrano buildroot. Początkowo brakowało mu pakietu zabbix, więc trzeba było go przenieść.Wystąpiły problemy z rosyjskim locale, które rozwiązano poprzez zastosowanie odpowiednich łatek (uwaga: w nowszych wersjach buildroot te łatki nie są już potrzebne).
Samo przeniesienie pakietu zabbix zostanie opisane w osobnym artykule.
Ponieważ wszystko powinno działać jako oprogramowanie sprzętowe (niezmienny obraz systemu + odzyskiwalne pliki konfiguracyjne/bazy danych), konieczne było napisanie własnych celów systemowych, usług i timerów (target, service, timer).
Zdecydowano się podzielić nośnik na 2 sekcje - sekcję z plikami systemowymi oraz sekcję ze zmienialnymi konfiguracjami i plikami bazy danych Zabbix.
Nieco trudniejsze okazało się rozwiązanie problemów związanych z bazą danych. Nie chciałem umieszczać tego bezpośrednio w mediach. Jednocześnie rozmiar bazy danych może osiągnąć rozmiar przekraczający rozmiar możliwego ramdysku. Dlatego wybrano rozwiązanie kompromisowe: baza danych znajduje się na drugiej partycji karty SD (nowoczesne karty SLC mają do 30 000 cykli zapisu), ale jest ustawienie umożliwiające korzystanie z nośników zewnętrznych (np. dysk twardy).
Monitoring temperatury zrealizowano za pomocą urządzenia RODOS-5. Oczywiście można używać bezpośrednio Dallas 1820, ale szybciej i łatwiej było podłączyć USB.
Grub86 został wybrany jako program ładujący dla x64_2. Aby go uruchomić, konieczne było napisanie minimalnej konfiguracji.
Po debugowaniu na qemu został przeniesiony na asus tinker board. Struktura mojej nakładki początkowo miała być wieloplatformowa - przydzielanie konfiguracji specyficznych dla każdej płyty (defconfig płyty, bootloader, generowanie obrazu z partycją systemową) i maksymalna jednolitość w dostosowywaniu systemu plików/tworzeniu obrazu z danymi. Dzięki takiemu przygotowaniu porting przebiegł szybko.
Gorąco polecamy zapoznanie się z artykułami wprowadzającymi:
Jak złożyć
Po sklonowaniu repozytorium uzyskuje się następującą strukturę plików:
[alexey@comp monitor]$ ls -1
buildroot-2019.05.tar.gz
overlay
README.md
run_me.shbuildroot-2019.05.tar.gz - wyczyść archiwum buildroot
nakładka to mój katalog z drzewem zewnętrznym. Tutaj przechowywane jest wszystko, czego potrzebujesz do zbudowania oprogramowania sprzętowego za pomocą buildroot.
README.md - opis projektu i instrukcja w języku angielskim.
run_me.sh to skrypt przygotowujący system kompilacji. Rozwija buildroot z archiwum, dołącza do niego nakładkę (poprzez mechanizm zewnętrznego drzewa) i pozwala wybrać płytkę docelową do montażu
[0] my_asus_tinker_defconfig
[1] my_beaglebone_defconfig
[2] x86_64_defconfig
Select defconfig, press A for abort. Default [0]Następnie przejdź do katalogu buildroot-2019.05 i uruchom polecenie make.
Po zakończeniu kompilacji wszystkie wyniki kompilacji znajdą się w katalogu Output/images:
[alexey@comp buildroot-2019.05]$ ls -1 output/images/
boot.img
boot.vfat
bzImage
data
data.img
external.img
external.qcow2
grub-eltorito.img
grub.img
intel-ucode
monitor-0.9-beta.tar.gz
qemu.qcow2
rootfs.cpio
sdcard.img
sys
updateWymagane pliki:
- sdcard.img - obraz multimediów do zapisania na karcie SD (przez dd lub rufus w wibdows).
- qemu.qcow2 - obraz nośnika do uruchomienia w qemu.
- external.qcow2 - obraz nośnika zewnętrznego dla bazy danych
- monitor-0.9-beta.tar.gz - archiwum do aktualizacji poprzez interfejs WWW
Generacja przewodników
Nie warto pisać tej samej instrukcji kilka razy. Najbardziej logiczną rzeczą jest zapisanie tego raz w Markdown, a następnie przekonwertowanie go na format PDF do pobrania i HTML dla interfejsu internetowego. Jest to możliwe dzięki pakietowi pandoc.
Jednocześnie wszystkie te pliki należy wygenerować przed złożeniem obrazu systemu; te skrypty po kompilacji są już bezużyteczne. Dlatego generowanie odbywa się w formie pakietu podręczników. Możesz zajrzeć do nakładki/pakietu/podręczników.
Plik manuals.mk (który wykonuje całą pracę)
################################################################################
#
# manuals
#
################################################################################
MANUALS_VERSION:= 1.0.0
MANUALS_SITE:= ${BR2_EXTERNAL_monitorOverlay_PATH}/package/manuals
MANUALS_SITE_METHOD:=local
define MANUALS_BUILD_CMDS
pandoc -s -o ${TARGET_DIR}/var/www/manual_en.pdf ${BR2_EXTERNAL_monitorOverlay_PATH}/../README.md
pandoc -f markdown -t html -o ${TARGET_DIR}/var/www/manual_en.html ${BR2_EXTERNAL_monitorOverlay_PATH}/../README.md
endef
$(eval $(generic-package))systemd
Świat Linux aktywnie przełącza się na systemd i ja też musiałem to zrobić.
Jedną z przyjemnych innowacji jest obecność timerów. W sumie pisze się o nich (i nie tylko) osobny artykuł, ale opowiem krótko.
Istnieją czynności, które należy wykonywać okresowo. Musiałem uruchomić logrotate, aby wyczyścić dzienniki lighttpd i php-fpm. Typową rzeczą byłoby pisanie poleceń w cronie, ale zdecydowałem się użyć systemowego zegara monotonicznego. Zatem logrotate działa w ściśle określonych odstępach czasu.
Oczywiście możliwe jest utworzenie timerów uruchamiających się w określonych dniach, ale nie było mi to potrzebne.
Przykład timera:
- Plik timera
[Unit] Description=RODOS temp daemon timer
[Regulator czasowy]
OnBootSec = 1 min
OnUnitActiveSec=1min
[Zainstalować]
WantedBy=timers.target
- Файл сервиса, вызываемого таймером:
```bash
[Unit]
Description=RODOS temp daemon
[Service]
ExecStart=/usr/bin/rodos.shObsługiwane płyty
Tinker Board firmy Asus to płyta główna, na której wszystko powinno działać. Wybrany jako niedrogi i bardzo mocny.
Beaglebone black to pierwsza deska, na której sprawdzono działanie (przy wyborze deski o większej mocy).
Qemu x86_64 - używany do debugowania programowania.
Jak działa
Podczas uruchamiania następuje dwuetapowe przywracanie ustawień:
- uruchomienie skryptu settings_restore (poprzez usługę). Przywraca podstawowe ustawienia systemu - strefę czasową, ustawienia regionalne, ustawienia sieciowe itp.
- uruchomienie skryptu przygotowującego (poprzez usługę) - tutaj przygotowywany jest zabbix i baza danych, adres IP jest wyprowadzany na konsolę.
Przy pierwszym uruchomieniu określany jest rozmiar drugiej partycji karty SD. Jeśli nadal jest nieprzydzielone miejsce, nośnik jest ponownie dzielony na partycje, a sekcja danych zajmuje całe wolne miejsce. Odbywa się to w celu zmniejszenia rozmiaru obrazu instalacyjnego (sdcard.img). Dodatkowo w tym momencie tworzony jest katalog roboczy postgresql. Dlatego pierwszy start z nowym przewoźnikiem będzie dłuższy niż kolejne.
Podłączając dysk zewnętrzny, w momencie uruchomienia wyszukuje wolny dysk i formatuje go do ext4 z etykietą zewnętrzną.
Uwaga! Podłączając dysk zewnętrzny (a także odłączając go lub wymieniając), należy wykonać kopię zapasową i przywrócić ustawienia!
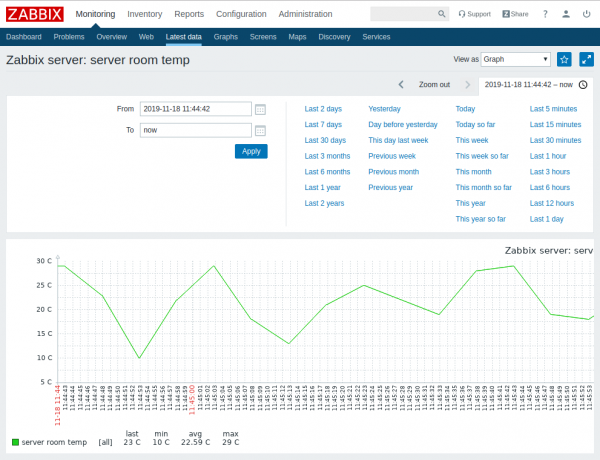
Do monitorowania temperatury służy urządzenie RODOS 5. Producent udostępnia kod źródłowy swojego narzędzia do pracy z urządzeniem. Po włączeniu systemu uruchamia się licznik czasu rodos, który uruchamia to narzędzie raz na minutę. Aktualna temperatura jest zapisywana w pliku /tmp/rodos_current_temp, po czym Zabbix może monitorować ten plik jako czujnik.
Nośnik przechowywania konfiguracji jest montowany w katalogu /data.
Podczas uruchamiania systemu i przygotowania go do pracy w konsoli pojawia się komunikat:
System starting, please waitPo zakończeniu prac przygotowawczych zmieni się na wyświetlanie adresu IP:
current ip 192.168.1.32
Ready to workKonfigurowanie Zabbix do monitorowania temperatury
Aby monitorować temperaturę, wykonaj 2 kroki:
- podłącz urządzenie RODOS do portu USB
- utwórz element danych w Zabbix
Otwórz interfejs sieciowy Zabbix:
- Otwórz sekcję Konfiguracja → Hosty
- Kliknij Elementy w wierszu naszego serwera Zabbix
- Kliknij opcję Utwórz element
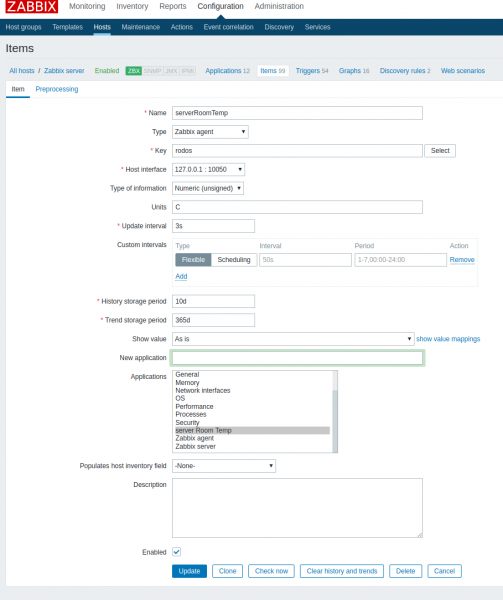
Wprowadź następujące dane:
- nazwa - według własnego uznania (na przykład serverRoomTemp )
- Typ - agent zabbix
- Klucz - Rodos
- Typ-numeryczny
- Jednostki - C
- Okres przechowywania historii — okres przechowywania historii. pozostało 10 dni
- Okres przechowywania trendów – okres przechowywania dynamiki zmian. Pozostało 30 dni
- Nowa aplikacja - serwer Temperatura pokojowa
I naciśnij przycisk DODAJ.
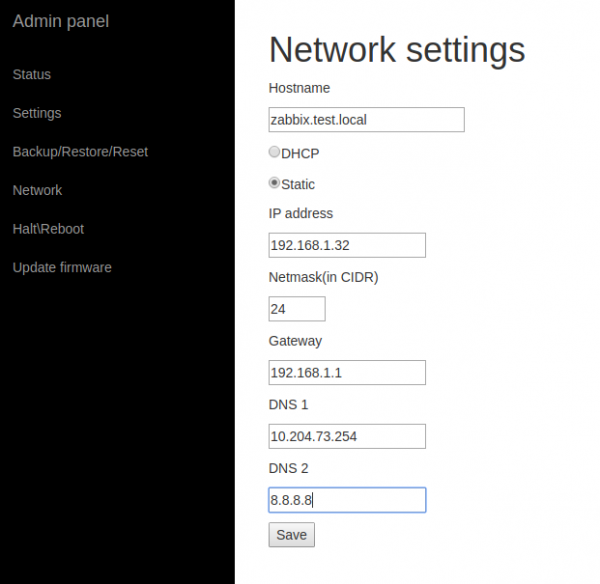
Zarządzaj ustawieniami za pośrednictwem interfejsu internetowego
Interfejs sieciowy napisany jest w języku PHP. Istnieją główne funkcje:
- przeglądać stan urządzenia
- zmiana ustawień sieciowych

- zmiana hasła użytkownika
- wybór strefy czasowej
- kopia zapasowa/przywracanie/reset fabryczny
- możliwość podłączenia dysku zewnętrznego
- Aktualizacja systemu

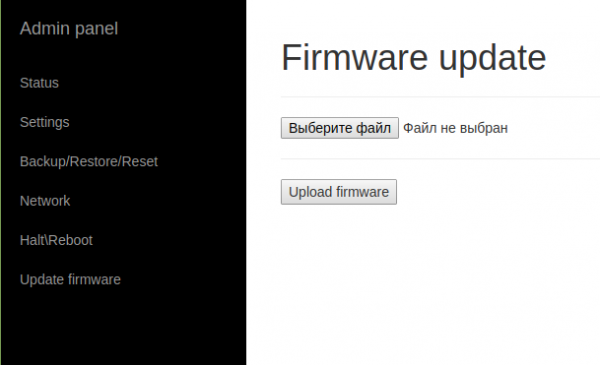
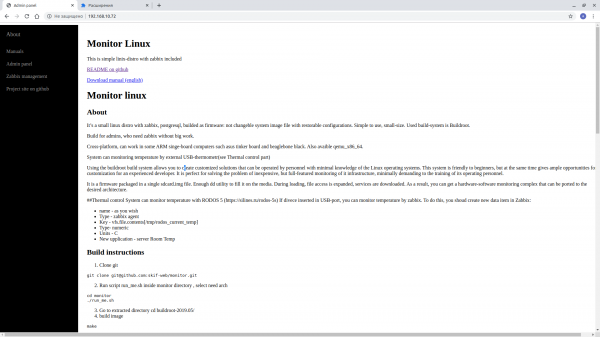
Logowanie do interfejsu internetowego jest chronione hasłem. Strona startowa - instrukcja.
Adres interfejsu Zabbix: ${ip/dns}/zabbix
Adres interfejsu zarządzania: ${ip/dns}/manage
Działa w Qemu
qemu-system-x86_64 -smp 4 -m 4026M -enable-kvm -machine q35,accel=kvm -device intel-iommu -cpu host -net nic -net most,br=bridge0 -device virtio-scsi-pci,id= scsi0 -drive file=output/images/qemu.qcow2,format=qcow2,aio=threads -device virtio-scsi-pci,id=scsi0 -drive file=output/images/external.qcow2,format=qcow2,aio=threads
To polecenie uruchomi system z 4 rdzeniami, 2048 RAM, włączoną obsługą KVM, kartą sieciową na mostku 0 i dwoma dyskami: jednym dla systemu i jednym zewnętrznym dla postgresql.
Obrazy można konwertować i uruchamiać w Virtualboxie:
qemu-img convert -f qcow2 qemu.qcow2 -O vdi qcow2.vdi
qemu-img convert -f qcow2 external.qcow2 -O vdi external.vdiNastępnie zaimportuj je do wirtualnej skrzynki i połącz się przez sata.
wniosek
Przy okazji zainteresowałem się stworzeniem produktu gotowego do użycia - z niezbyt pięknym interfejsem (nie lubię ich pisać), ale takim, który działa i jest łatwy w konfiguracji.
Ostatnia próba instalacji zabbix-appliance w KVM pokazała, że ten krok był prawidłowy (po zakończeniu instalacji system nie uruchamia się). Być może robię coś źle 😉
Źródło: www.habr.com
