


Ta članek začenja serijo člankov, posvečenih avtomatiziranim metodam za nastavitev PID regulatorjev v okolju Simulink. Danes bomo ugotovili, kako delati z aplikacijo PID Tuner.
Predstavitev
Najbolj priljubljena vrsta krmilnikov, ki se uporabljajo v industriji v sistemih krmiljenja z zaprto zanko, se lahko šteje za PID krmilnike. In če se inženirji spominjajo zgradbe in principa delovanja krmilnika iz študentskih dni, potem njegova konfiguracija, tj. izračun regulatornih koeficientov je še vedno problem. Obstaja ogromno literature, tako tuje (na primer [1, 2]) kot domače (na primer [3, 4]), kjer je prilagoditev regulatorjev razložena v precej zapletenem jeziku teorije avtomatskega krmiljenja.
Ta serija člankov bo opisala avtomatizirane načine za nastavitev krmilnikov PID z orodji Simulink, kot so:
- PID sprejemnik
- Optimizator odziva
- Uglaševalec nadzornega sistema,
- Uglaševalec PID na osnovi frekvenčnega odziva,
- Samodejni uglaševalec PID z zaprto zanko.
Predmet krmilnega sistema bo električni pogon na osnovi enosmernega motorja, vzbujenega s trajnimi magneti, ki deluje skupaj z menjalnikom za vztrajnostno obremenitev, z naslednjimi parametri:
- napajalna napetost motorja,
 ;
; - aktivni upor navitja armature motorja,
 ;
; - induktivna reaktanca navitja armature motorja,
 ;
; - koeficient navora motorja,
 ;
; - vztrajnostni moment rotorja motorja,
 .
.
Parametri obremenitve in menjalnika:
- vztrajnostni moment bremena,
 ;
; - prestavno razmerje,
 .
.
Članki praktično ne vsebujejo matematičnih formul, vendar je zaželeno, da ima bralec osnovno znanje iz teorije avtomatskega krmiljenja, pa tudi izkušnje z modeliranjem v okolju Simulink za razumevanje predlaganega gradiva.
Model sistema
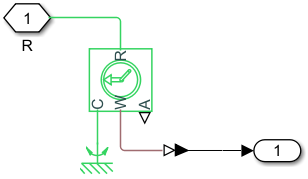
Oglejmo si linearni krmilni sistem za kotno hitrost servo električnega pogona, katerega poenostavljen blok diagram je predstavljen spodaj.

V skladu z dano strukturo je bil zgrajen model takega sistema v okolju Simulink.

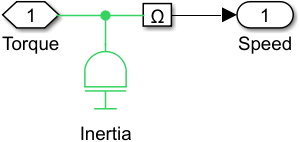
Modeli električnega pogona (Electric actuator subsystem) in inercialne obremenitve (Load subsystem) so bili ustvarjeni z uporabo blokov knjižnice fizičnega modeliranja. :
- model električnega pogona,
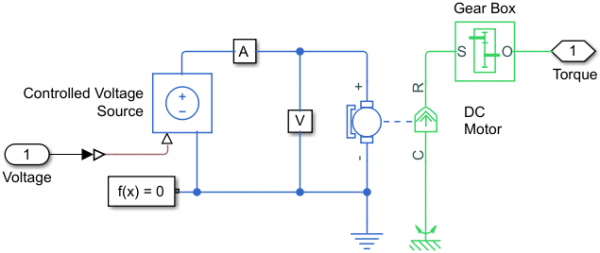
- model vztrajnostne obremenitve.
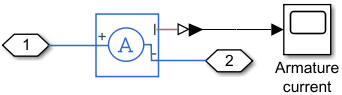
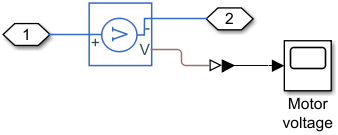
Modeli električnih pogonov in bremen vključujejo tudi senzorske podsisteme različnih fizikalnih veličin:
- tok, ki teče v navitju armature motorja (podsistem A),
- napetost na njegovem navitju (podsistem V),
- kotna hitrost krmilnega objekta (podsistem Ω).
Preden nastavimo parametre PID regulatorja, zaženimo model za izračun, pri čemer sprejmemo prenosno funkcijo regulatorja  . Rezultati simulacije za vhodni signal 150 vrt/min so prikazani spodaj.
. Rezultati simulacije za vhodni signal 150 vrt/min so prikazani spodaj.
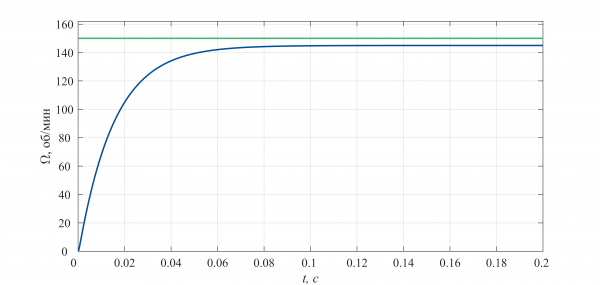
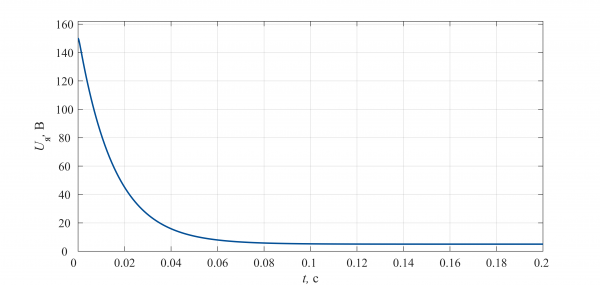
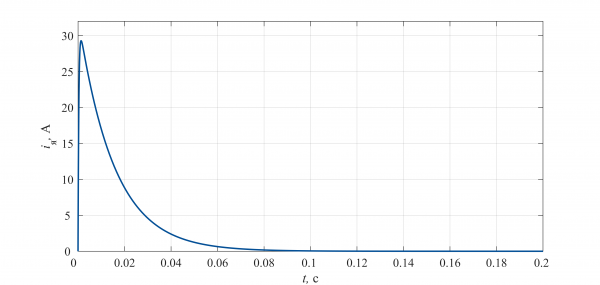
Iz analize zgornjih grafov je razvidno, da:
- Izhodna koordinata krmilnega sistema ne doseže podane vrednosti, tj. V sistemu je statična napaka.
- Napetost na navitjih motorja na začetku simulacije doseže vrednost 150 V, kar bo povzročilo njegovo odpoved zaradi dovajanja napetosti, ki je večja od nazivne (24 V) na njegova navitja.
Odziv sistema na posamezen impulz mora izpolnjevati naslednje zahteve:
- prekoračitev (Overshoot) ne več kot 10%,
- Čas vzpona manj kot 0.8 s,
- Prehodni čas (čas umirjanja) manj kot 2 s.
Poleg tega mora regulator omejiti napetost, dovedeno v navitje motorja, na vrednost napajalne napetosti.
Nastavitev krmilnika
Parametri krmilnika se konfigurirajo z orodjem , ki je na voljo neposredno v oknu s parametri bloka regulatorja PID.
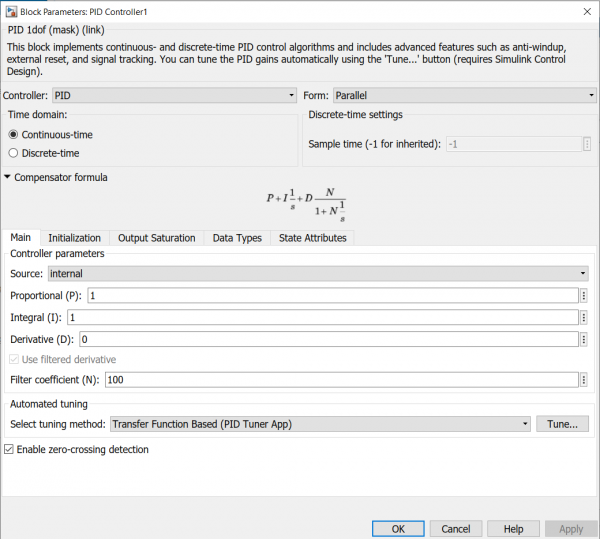
Aplikacijo zaženemo s pritiskom na gumb Uglasi ...ki se nahaja na plošči Samodejno uglaševanje. Treba je opozoriti, da je pred izvedbo faze nastavitve parametrov regulatorja potrebno izbrati njegovo vrsto (P, PI, PD itd.), Pa tudi vrsto (analogno ali diskretno).
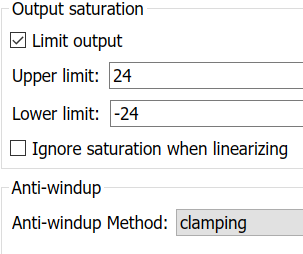
Ker je ena od zahtev omejitev njegove izhodne koordinate (napetost na navitju motorja), je treba določiti dovoljeno območje napetosti. Za to:
- Pojdite na zavihek Izhodna nasičenost.
- Kliknite gumb z zastavico Omejite izhod, zaradi česar se aktivirata polja za nastavitev zgornje (Upper limit) in spodnje (Lower limit) meje območja izhodnih vrednosti.
- Določite meje območja.
Pravilno delovanje regulacijske enote kot dela sistema vključuje uporabo metod, namenjenih boju proti celostni nasičenosti. Blok izvaja dve metodi: povratni izračun in vpenjanje. Podrobne informacije o teh metodah se nahajajo . Spustni meni za izbiro metode se nahaja na plošči Proti navijanju.
V tem primeru bomo v polja zapisali vrednosti 24 in -24 Zgornja meja и Spodnja meja v skladu s tem in uporabite tudi metodo vpenjanja za odpravo integralne nasičenosti.
Morda boste opazili, da se je videz bloka regulatorja spremenil: poleg izhodnih vrat bloka se je pojavil znak nasičenosti.
Nato potrdite vse spremembe s pritiskom na gumb Uporabi, se vrnite na zavihek Glavne in nažimaем gumb Uglasi ..., ki odpre novo okno aplikacije PIDTuner.
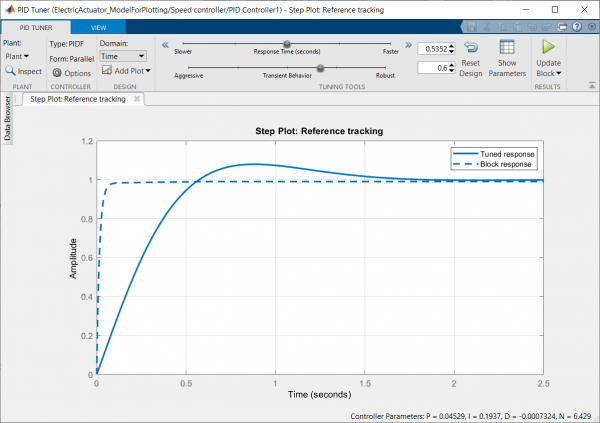
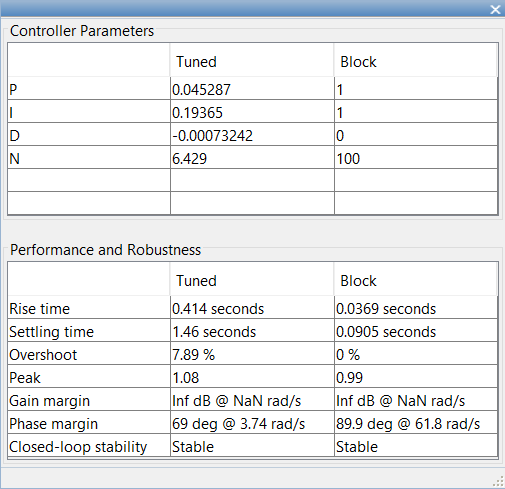
V grafičnem območju okna sta prikazana dva prehodna procesa: s trenutnimi parametri krmilnika, tj. za nekonfiguriran krmilnik in za samodejno izbrane vrednosti. Nove vrednosti parametrov si lahko ogledate s klikom na gumb Pokaži parametreki se nahaja v orodni vrstici. Ob pritisku na gumb se prikažeta dve tabeli: izbrani parametri regulatorja (Controller Parameters) in ocene karakteristik prehodnega procesa z izbranimi parametri (Performance in Robustness).
Kot je razvidno iz vrednosti druge tabele, samodejno izračunani koeficienti regulatorja izpolnjujejo vse zahteve.
Nastavitev regulatorja zaključimo s pritiskom na gumb z zelenim trikotnikom, ki se nahaja desno od gumba Pokaži parametre, po katerem se bodo nove vrednosti parametrov samodejno spremenile v ustreznih poljih v oknu z nastavitvami parametrov bloka krmilnika PID.
Spodaj so prikazani rezultati simulacije sistema z nastavljenim krmilnikom za več vhodnih signalov. Pri visokih nivojih vhodnega signala (modra črta) bo sistem deloval v načinu napetostne nasičenosti.
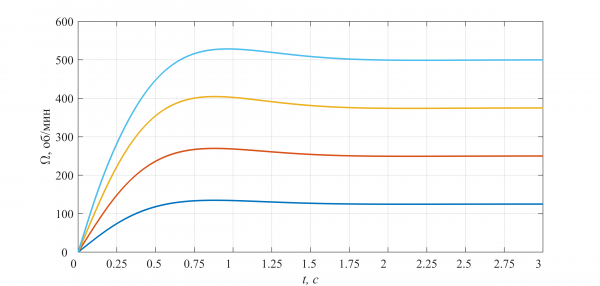
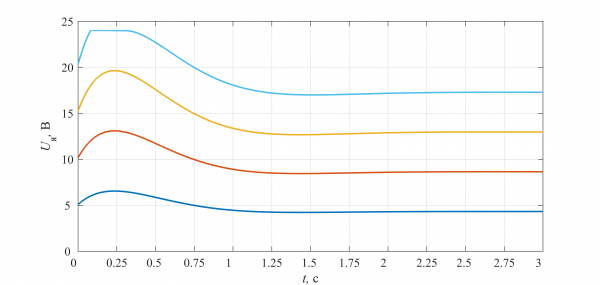
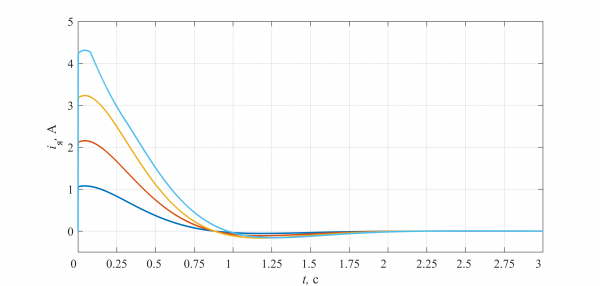
Upoštevajte, da orodje PID Tuner izbere koeficiente regulatorja na podlagi lineariziranega modela, zato je treba pri prehodu na nelinearni model pojasniti njegove parametre. V tem primeru lahko uporabite aplikacijo .
Literatura
- Priročnik pravil za uravnavanje PI in PID regulatorjev. Aidan O'Dwyer
- Načrtovanje PID krmilnega sistema in avtomatska nastavitev z uporabo MATLAB, Simulink. Wang L.
- PID regulacija v nestrogi obliki. Karpov V.E.
- PID krmilniki. Težave pri izvajanju. 1., 2. del. Denisenko V.
Vir: www.habr.com
