


Ky artikull fillon një seri artikujsh kushtuar metodave të automatizuara për akordimin e kontrollorëve PID në mjedisin Simulink. Sot do të kuptojmë se si të punojmë me aplikacionin PID Tuner.
Paraqitje
Lloji më i popullarizuar i kontrollorëve të përdorur në industri në sistemet e kontrollit me lak të mbyllur mund të konsiderohen kontrollorët PID. Dhe nëse inxhinierët kujtojnë strukturën dhe parimin e funksionimit të kontrolluesit që nga ditët e tyre studentore, atëherë konfigurimi i tij, d.m.th. llogaritja e koeficientëve të kontrolluesit është ende një problem. Ekziston një sasi e madhe literaturë, si e huaj (për shembull, [1, 2]) dhe vendase (për shembull, [3, 4]), ku rregullimi i rregullatorëve shpjegohet në gjuhën mjaft të ndërlikuar të teorisë së kontrollit automatik.
Kjo seri artikujsh do të përshkruajë mënyra të automatizuara për të akorduar kontrollorët PID duke përdorur veglat Simulink si:
- Akordues PID
- Optimizuesi i përgjigjes
- Tuner i sistemit të kontrollit,
- Akordues PID i bazuar në përgjigjen e frekuencës,
- Autoaktonizues PID me lak të mbyllur.
Objekti i sistemit të kontrollit do të jetë një makinë elektrike e bazuar në një motor DC të ngacmuar nga magnet të përhershëm, duke punuar së bashku me një kuti ingranazhi për ngarkesë inerciale, me parametrat e mëposhtëm:
- Tensioni i furnizimit të motorit,
 ;
; - rezistenca aktive e mbështjelljes së armaturës së motorit,
 ;
; - reaksioni induktiv i mbështjelljes së armaturës së motorit,
 ;
; - koeficienti i rrotullimit të motorit,
 ;
; - momenti i inercisë së rotorit të motorit,
 .
.
Parametrat e ngarkesës dhe kutisë së ingranazhit:
- momenti i inercisë së ngarkesës,
 ;
; - raporti i marsheve,
 .
.
Artikujt praktikisht nuk përmbajnë formula matematikore, megjithatë, është e dëshirueshme që lexuesi të ketë njohuri bazë në teorinë e kontrollit automatik, si dhe përvojë në modelimin në mjedisin Simulink për të kuptuar materialin e propozuar.
Modeli i sistemit
Le të shqyrtojmë një sistem kontrolli linear për shpejtësinë këndore të një servo elektrike, një bllok diagram i thjeshtuar i të cilit është paraqitur më poshtë.

Në përputhje me strukturën e dhënë, një model i një sistemi të tillë u ndërtua në mjedisin Simulink.

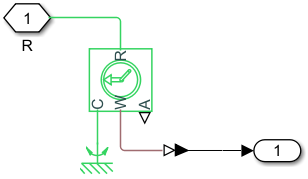
Modelet e makinës elektrike (Nënsistemi i aktivizuesit elektrik) dhe i ngarkesës inerciale (nënsistemi i ngarkesës) u krijuan duke përdorur blloqe të bibliotekës së modelimit fizik :
- modeli i makinës elektrike,
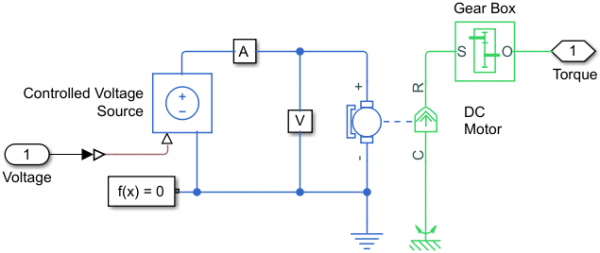
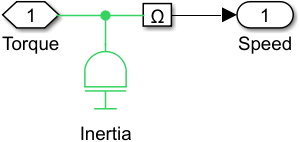
- modeli i ngarkesës inerciale.
Modelet e makinës elektrike dhe ngarkesave përfshijnë gjithashtu nënsisteme sensorë të sasive të ndryshme fizike:
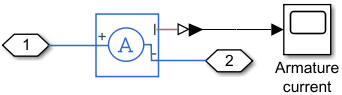
- rryma që rrjedh në mbështjelljen e armaturës së motorit (nënsistemi A),
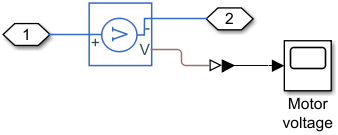
- tensioni në mbështjelljen e tij (nënsistemi V),
- shpejtësia këndore e objektit të kontrollit (nënsistemi Ω).
Para se të vendosim parametrat e kontrolluesit PID, le të ekzekutojmë modelin për llogaritjen, duke pranuar funksionin e transferimit të kontrolluesit  . Rezultatet e simulimit për një sinjal hyrës prej 150 rpm janë paraqitur më poshtë.
. Rezultatet e simulimit për një sinjal hyrës prej 150 rpm janë paraqitur më poshtë.
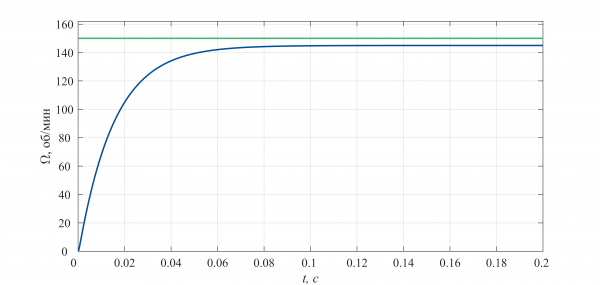
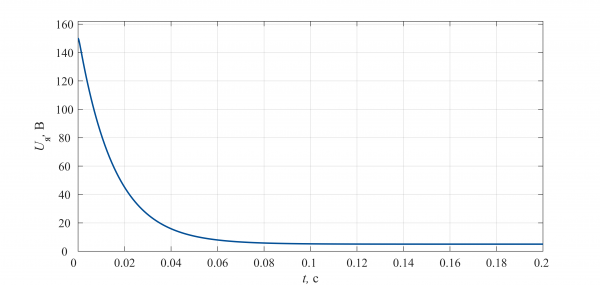
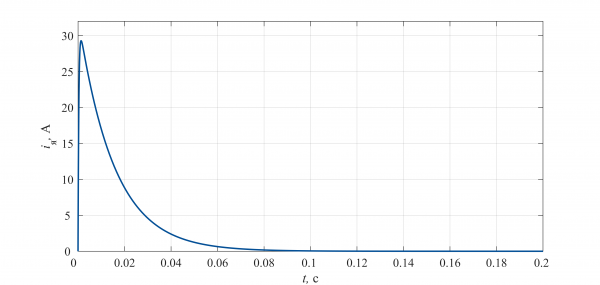
Nga analiza e grafikëve të mësipërm është e qartë se:
- Koordinata e daljes së sistemit të kontrollit nuk arrin vlerën e specifikuar, d.m.th. Ka një gabim statik në sistem.
- Tensioni në mbështjelljet e motorit arrin një vlerë prej 150 V në fillim të simulimit, gjë që do të çojë në dështimin e tij për shkak të furnizimit me një tension më të madh se ai nominal (24 V) në mbështjelljet e tij.
Përgjigja e sistemit ndaj një impulsi të vetëm duhet të plotësojë kërkesat e mëposhtme:
- tejkalim (mbikalim) jo më shumë se 10%,
- Koha e ngritjes më pak se 0.8 s,
- Koha kalimtare (koha e rregullimit) më pak se 2 s.
Për më tepër, rregullatori duhet të kufizojë tensionin e furnizuar në mbështjelljen e motorit në vlerën e tensionit të furnizimit.
Vendosja e kontrolluesit
Parametrat e kontrolluesit konfigurohen duke përdorur mjetin , e cila është e disponueshme drejtpërdrejt në dritaren e parametrave të bllokut të PID Controller.
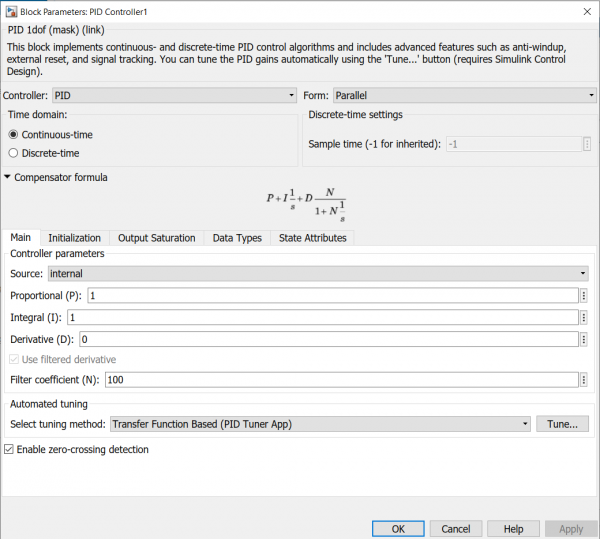
Aplikacioni hapet duke shtypur një buton Melodi…vendosur në panel Akordim i automatizuar. Vlen të përmendet se përpara se të kryeni fazën e vendosjes së parametrave të kontrolluesit, është e nevojshme të zgjidhni llojin e tij (P, PI, PD, etj.), si dhe llojin e tij (analog ose diskret).
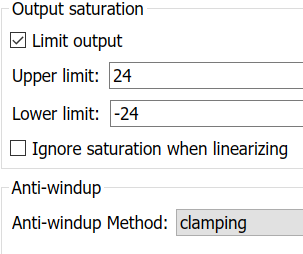
Meqenëse një nga kërkesat është kufizimi i koordinatës së daljes së tij (tensioni në mbështjelljen e motorit), duhet të specifikohet diapazoni i lejuar i tensionit. Për këtë:
- Shkoni te skeda Ngopja e daljes.
- Klikoni në butonin e flamurit Kufizoni prodhimin, si rezultat i së cilës aktivizohen fushat për vendosjen e kufirit të sipërm (kufiri i sipërm) dhe kufiri i poshtëm (kufiri i poshtëm) i diapazonit të vlerës së daljes.
- Vendosni kufijtë e diapazonit.
Funksionimi i saktë i njësisë së rregullatorit si pjesë e sistemit përfshin përdorimin e metodave që synojnë luftimin e ngopjes integrale. Blloku zbaton dy metoda: llogaritja e pasme dhe shtrëngimi. Informacione të hollësishme rreth këtyre metodave gjenden . Menyja rënëse e përzgjedhjes së metodës ndodhet në panel Kundër përmbysjes.
Në këtë rast, ne do të shkruajmë vlerat 24 dhe -24 në fushat Kufiri i sipërm и Kufiri i poshtëm në përputhje me rrethanat, dhe gjithashtu përdorni metodën e shtrëngimit për të eliminuar ngopjen integrale.
Ju mund të vini re se pamja e bllokut të rregullatorit ka ndryshuar: një shenjë ngopjeje është shfaqur pranë portës së daljes së bllokut.
Më pas, pranoni të gjitha ndryshimet duke shtypur butonin Aplikoni, kthehu te skeda Kryesor dhe shtypni butonin Melodi…, e cila do të hapë një dritare të re të aplikacionit PIDTuner.
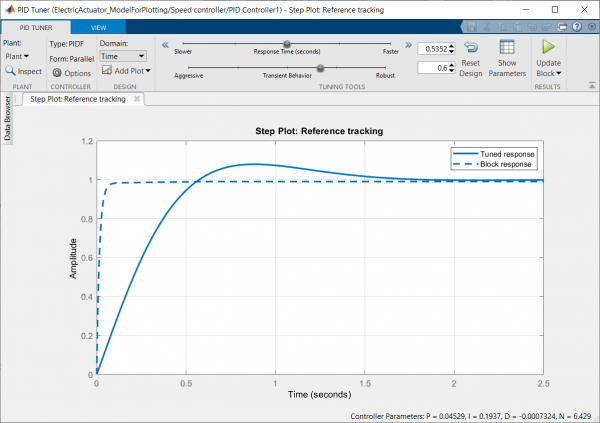
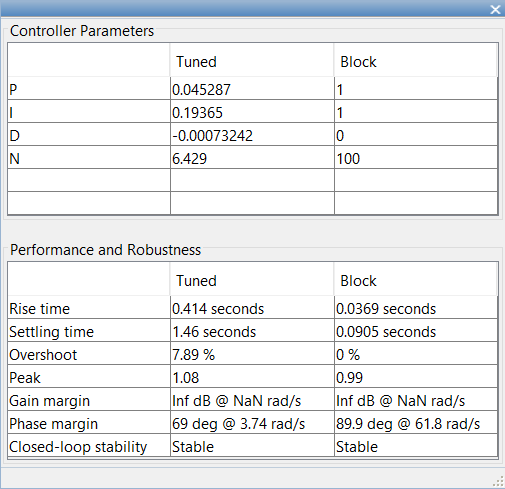
Në zonën grafike të dritares, shfaqen dy procese kalimtare: me parametrat aktualë të kontrolluesit, d.m.th. për një kontrollues të pakonfiguruar dhe për vlerat e zgjedhura automatikisht. Vlerat e reja të parametrave mund të shihen duke klikuar butonin Shfaq parametratndodhet në shiritin e veglave. Kur shtypni butonin, do të shfaqen dy tabela: parametrat e zgjedhur të kontrollorit (Parametrat e kontrolluesit) dhe vlerësimet e karakteristikave të procesit kalimtar me parametrat e zgjedhur (Performanca dhe Qëndrueshmëria).
Siç shihet nga vlerat e tabelës së dytë, koeficientët e llogaritur automatikisht të kontrolluesit plotësojnë të gjitha kërkesat.
Vendosja e rregullatorit plotësohet duke shtypur butonin me një trekëndësh të gjelbër të vendosur në të djathtë të butonit Shfaq parametrat, pas së cilës vlerat e reja të parametrave do të ndryshojnë automatikisht në fushat përkatëse në dritaren e cilësimeve të parametrave të bllokut të Kontrolluesit PID.
Rezultatet e simulimit të një sistemi me një kontrollues të akorduar për disa sinjale hyrëse janë paraqitur më poshtë. Në nivele të larta të sinjalit të hyrjes (vija blu), sistemi do të funksionojë në modalitetin e ngopjes së tensionit.
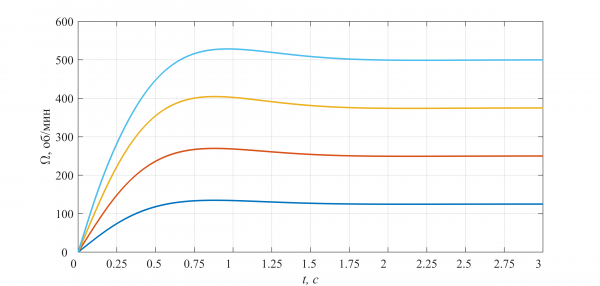
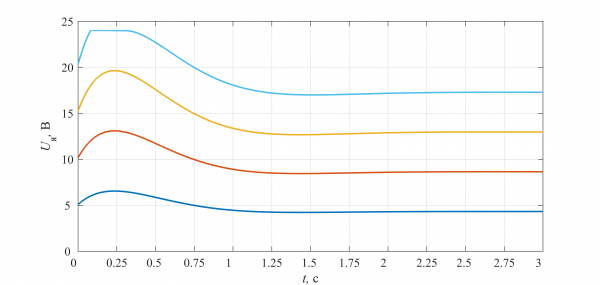
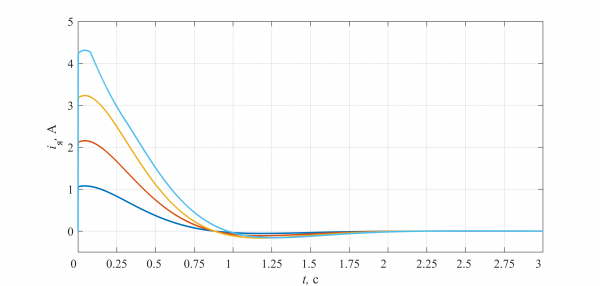
Vini re se mjeti PID Tuner zgjedh koeficientët e kontrolluesit bazuar në një model të linearizuar, kështu që kur kaloni në një model jolinear, është e nevojshme të sqarohen parametrat e tij. Në këtë rast, ju mund të përdorni aplikacionin .
Letërsi
- Manuali i Rregullave të Akordimit të Kontrolluesit PI dhe PID. Aidan O'Dwyer
- Dizajni i sistemit të kontrollit PID dhe sintonizimi automatik duke përdorur MATLAB, Simulink. Wang L.
- Kontrolli PID në një formë jo strikte. Karpov V.E.
- Kontrollorët PID. Çështjet e zbatimit. Pjesët 1, 2. Denisenko V.
Burimi: www.habr.com
