

Hej Habr. Förmodligen alla som någonsin träffat eller sett av släktingar eller vänner på ett flygplan har använt gratistjänsten Flightradar24. Detta är ett mycket bekvämt sätt att spåra flygplanets position i realtid.
В Funktionsprincipen för en sådan onlinetjänst beskrevs. Nu ska vi gå vidare och ta reda på vilken data som sänds och tas emot från flygplanet till mottagarstationen och avkoda den själva med hjälp av Python.
Story
Uppenbarligen överförs inte data om flygplanen så att användarna kan se dem på sina smartphones. Systemet kallas ADS-B (Automatic dependent surveillance—broadcast) och används för att automatiskt överföra information om ett flygplan till kontrollcentralen – dess identifierare, koordinater, riktning, hastighet, höjd och andra data överförs. Tidigare, före tillkomsten av sådana system, kunde styrenheten bara se en prick på radarn. Detta blev otillräckligt när det fanns för många flygplan.
Tekniskt sett består ADS-B av en sändare på ett flygplan som regelbundet skickar ut informationspaket med en ganska hög frekvens på 1090 MHz (det finns andra lägen, men vi är inte så intresserade av dem, eftersom koordinater bara överförs här). Naturligtvis finns det förutom sändaren även en mottagare någonstans på flygplatsen, men för oss, som användare, är vi intresserade av vår egen mottagare.
Förresten, som jämförelse dök det första sådana systemet, Airnav Radarbox, designat för vanliga användare, upp 2007 och kostade cirka 900 dollar, och ungefär 250$ En prenumeration på nätverkstjänster kostar per år.
Recensioner från de första ryska ägarna kan läsas på forumet . Nu när RTL-SDR-mottagare har blivit allmänt tillgängliga kan en liknande enhet monteras för 30 dollar, mer information om detta finns i . Låt oss gå vidare till själva protokollet – låt oss se hur det fungerar.
Mottagning av signaler
Först måste signalen spelas in. Hela signalen är bara 120 mikrosekunder lång, så för att bekvämt analysera dess komponenter är en SDR-mottagare med en samplingsfrekvens på minst 5 MHz önskvärd.
Efter inspelningen får vi en WAV-fil med en samplingsfrekvens på 5000000 30 500 samplingar/sek; XNUMX sekunder av en sådan inspelning "väger" cirka XNUMX MB. Att lyssna på det med en mediaspelare är förstås meningslöst – filen innehåller inte ljud, utan en direkt digitaliserad radiosignal – det är så Software Defined Radio fungerar.
Vi kommer att öppna och bearbeta filen med hjälp av Python. De som vill experimentera på egen hand kan ladda ner en provinspelning .
Låt oss ladda ner filen och se vad som finns inuti.
from scipy.io import wavfile
import matplotlib.pyplot as plt
import numpy as np
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
data = data.astype(float)
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
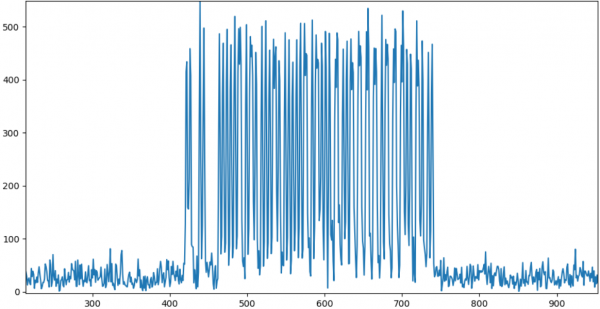
plt.plot(A)
plt.show()
Resultat: vi ser tydliga ”pulser” mot bakgrundsbruset.
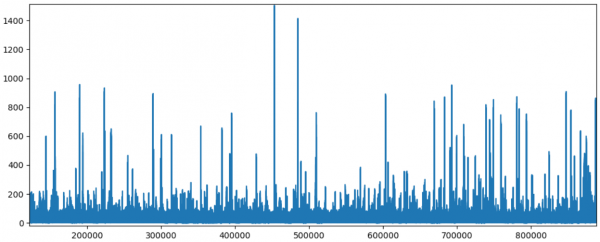
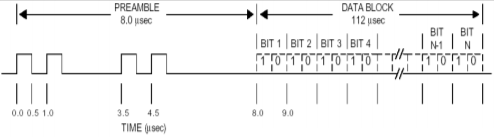
Varje "puls" är en signal, vars struktur är tydligt synlig om man ökar upplösningen på grafen.
Som ni kan se stämmer bilden ganska väl överens med vad som ges i beskrivningen ovan. Du kan börja bearbeta informationen.
Avkodning
Först måste du hämta bitströmmen. Själva signalen kodas med Manchester-kodning:

Från skillnaden i nivåer i nibbles är det lätt att få fram de riktiga "0" och "1".
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
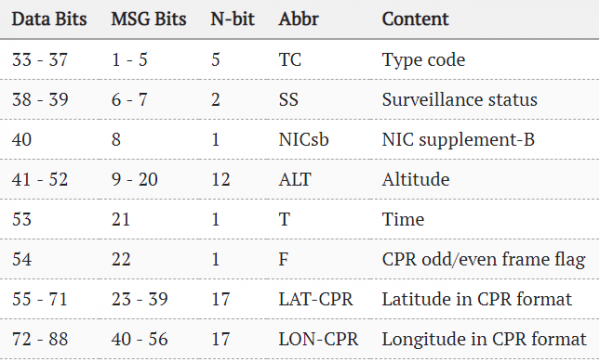
Själva signalens struktur är följande:

Låt oss titta på fälten mer i detalj.
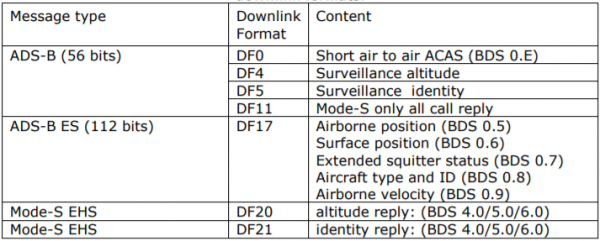
DF (Nedlänksformat, 5 bitar) – definierar meddelandetypen. Det finns flera typer:
()
Vi är bara intresserade av DF17-typen, eftersom det är den som innehåller flygplanets koordinater.
ICAO (24 bitar) - internationell unik flygplanskod. Du kan kontrollera ett flygplan med hjälp av dess kod (Tyvärr slutade författaren uppdatera databasen, men den är fortfarande relevant). Till exempel, för kod 3c5ee2 har vi följande information:

Redigera: i Beskrivningen av ICAO-koden ges mer detaljerat, jag rekommenderar att de som är intresserade läser den.
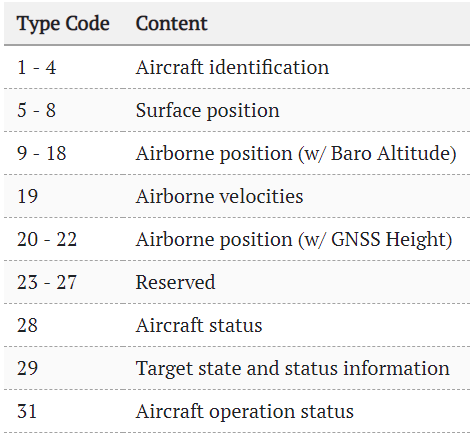
DATA (56 eller 112 bitar) - den faktiska datan som vi kommer att avkoda. De första 5 bitarna av data är fältet kod, som innehåller undertypen av den lagrade datan (inte att förväxla med DF). Det finns en hel del av dessa typer:
()
Låt oss titta på några exempel på paket.
Flygplansidentifiering
Exempel i binär form:
00100 011 000101 010111 000111 110111 110001 111000
Datafält:
+------+------+------+------+------+------+------+------+------+------+
| TC,5 | EC,3 | C1,6 | C2,6 | C3,6 | C4,6 | C5,6 | C6,6 | C7,6 | C8,6 |
+------+------+------+------+------+------+------+------+------+------+
TC = 00100b = 4, varje tecken C1-C8 innehåller koder som motsvarar indexen i strängen:
#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_##############0123456789######
Genom att avkoda strängen är det enkelt att få fram flygplanskoden: EWG7184
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Aircraft Identification:", code_str.replace('#', ''))
Luftburen position
Om namnet är enkelt är koordinaterna mer komplicerade. De överförs i form av 2x, jämna och udda ramar. Fältkod TC = 01011b = 11.
Exempel på jämna och udda paket:
01011 000 000101110110 00 10111000111001000 10000110101111001
01011 000 000110010000 01 10010011110000110 10000011110001000
Själva beräkningen av koordinaterna sker enligt en ganska knepig formel:
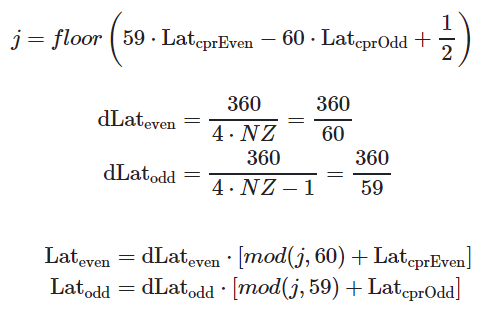
()
Jag är ingen GIS-expert, så jag vet inte var det kommer ifrån. Om någon vet, skriv gärna i kommentarerna.
Höjden beräknas enklare - beroende på den specifika biten kan den representeras som antingen en multipel av 25 eller 100 fot.
Luftburen hastighet
Paket med TC=19. Det intressanta här är att hastigheten kan vara antingen exakt, i förhållande till marken (markhastighet), eller lufthastighet, mätt av flygplanets sensor (lufthastighet). Många olika fält godkänns också:
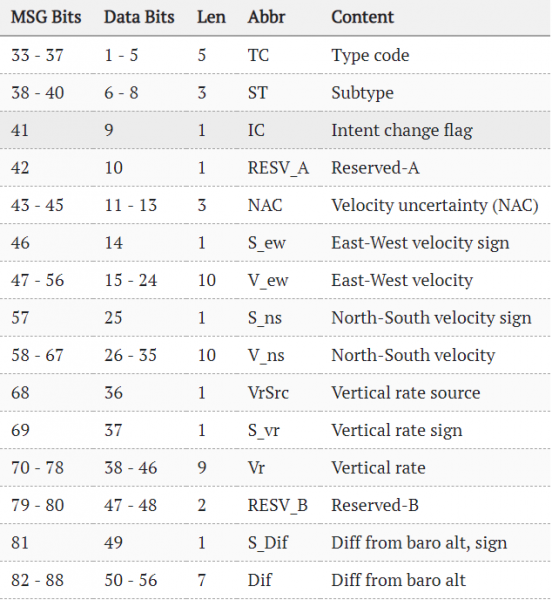
()
Slutsats
Som ni kan se har ADS-B-tekniken blivit en intressant symbios, där vilken standard som helst är användbar inte bara för proffs utan även för vanliga användare. Men naturligtvis spelades nyckelrollen i detta av minskningen av kostnaden för digital SDR-mottagarteknik, vilket gör att enheten kan ta emot signaler med en frekvens över gigahertz för bokstavligen "öre".
Naturligtvis finns det mycket mer i själva standarden. Intresserade kan se PDF-filen på sidan eller besök den som redan nämnts ovan .
Det är osannolikt att många kommer att tycka att allt som skrivits ovan är användbart, men åtminstone hoppas jag att den allmänna uppfattningen om hur det fungerar kvarstår.
Förresten, en färdig avkodare i Python finns redan, du kan studera den. . Och ägare av SDR-mottagare kan montera och lansera en färdig ADS-B-avkodare , mer information om detta gavs i .
Källkoden för parsern som beskrivs i artikeln ges nedanför klippningen. Detta är ett testexempel, inte avsett för produktion, men vissa saker fungerar i det, och du kan använda det för att analysera filen som skrivits ovan.
Källkod (Python)
from __future__ import print_function
from scipy.io import wavfile
from scipy import signal
import matplotlib.pyplot as plt
import numpy as np
import math
import sys
def parse_message(data, start, bit_len):
max_len = bit_len*128
A = data[start:start + max_len]
A = signal.resample(A, 10*max_len)
bits = np.zeros(10*max_len)
bit_len *= 10
start_data = bit_len*8
# Parse first 8 bits
bits_str = ""
for p in range(8):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
df = int(bits_str[0:5], 2)
# Aircraft address (db - https://junzis.com/adb/?q=3b1c5c )
bits_str = ""
for p in range(8, 32):
pos = start_data + bit_len * p
p1, p2 = A[pos: pos + bit_len / 2], A[pos + bit_len / 2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
elif avg1 > avg2:
bits_str += "1"
# print "Aircraft address:", bits_str, hex(int(bits_str, 2))
address = hex(int(bits_str, 2))
# Filter specific aircraft (optional)
# if address != "0x3c5ee2":
# return
if df == 16 or df == 17 or df == 18 or df == 19 or df == 20 or df == 21:
# print "Pos:", start, "DF:", msg_type
# Data (56bit)
bits_str = ""
for p in range(32, 88):
pos = start_data + bit_len*p
p1, p2 = A[pos: pos + bit_len/2], A[pos + bit_len/2: pos + bit_len]
avg1, avg2 = np.average(p1), np.average(p2)
if avg1 < avg2:
bits_str += "0"
# bits[pos + bit_len / 2] = 50
elif avg1 > avg2:
bits_str += "1"
# http://www.lll.lu/~edward/edward/adsb/DecodingADSBposition.html
# print "Data:"
# print bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17]
# Type Code:
tc, ec = int(bits_str[:5], 2), int(bits_str[5:8], 2)
# print("DF:", df, "TC:", tc)
# 1 - 4 Aircraft identification
# 5 - 8 Surface position
# 9 - 18 Airborne position (w/ Baro Altitude)
# 19 Airborne velocities
if tc >= 1 and tc <= 4: # and (df == 17 or df == 18):
print("Aircraft address:", address)
print("Data:")
print(bits_str[:8], bits_str[8:14], bits_str[14:20], bits_str[20:26], bits_str[26:32], bits_str[32:38], bits_str[38:44])
symbols = "#ABCDEFGHIJKLMNOPQRSTUVWXYZ#####_###############0123456789######"
code_str = ""
for p in range(8):
c = int(bits_str[8 + 6*p:8 + 6*(p + 1)], 2)
code_str += symbols[c]
print("Aircraft Identification:", code_str.replace('#', ''))
print()
if tc == 11:
print("Aircraft address:", address)
print("Data: (11)")
print(bits_str[:8], bits_str[8:20], bits_str[20:22], bits_str[22:22+17], bits_str[39:39+17])
# Bit 22 contains the F flag which indicates which CPR format is used (odd or even)
# First frame has F flag = 0 so is even and the second frame has F flag = 1 so odd
# f = bits_str[21:22]
# print("F:", int(f, 2))
# Altitude
alt1b = bits_str[8:20]
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
# lat_dec = int(bits_str[22:22+17], 2)
# lon_dec = int(bits_str[39:39+17], 2)
# print("Lat/Lon:", lat_dec, lon_dec)
# http://airmetar.main.jp/radio/ADS-B%20Decoding%20Guide.pdf
print()
if tc == 19:
print("Aircraft address:", address)
print("Data:")
# print(bits_str)
print(bits_str[:5], bits_str[5:8], bits_str[8:10], bits_str[10:13], bits_str[13] ,bits_str[14:24], bits_str[24], bits_str[25:35], bits_str[35:36], bits_str[36:65])
subtype = int(bits_str[5:8], 2)
# https://mode-s.org/decode/adsb/airborne-velocity.html
spd, hdg, rocd = -1, -1, -1
if subtype == 1 or subtype == 2:
print("Velocity Subtype 1: Ground speed")
v_ew_sign = int(bits_str[13], 2)
v_ew = int(bits_str[14:24], 2) - 1 # east-west velocity
v_ns_sign = int(bits_str[24], 2)
v_ns = int(bits_str[25:35], 2) - 1 # north-south velocity
v_we = -1*v_ew if v_ew_sign else v_ew
v_sn = -1*v_ns if v_ns_sign else v_ns
spd = math.sqrt(v_sn*v_sn + v_we*v_we) # unit in kts
hdg = math.atan2(v_we, v_sn)
hdg = math.degrees(hdg) # convert to degrees
hdg = hdg if hdg >= 0 else hdg + 360 # no negative val
if subtype == 3:
print("Subtype Subtype 3: Airspeed")
hdg = int(bits_str[14:24], 2)/1024.0*360.0
spd = int(bits_str[25:35], 2)
vr_sign = int(bits_str[36], 2)
vr = int(bits_str[36:45], 2)
rocd = -1*vr if vr_sign else vr # rate of climb/descend
print("Speed (kts):", spd, "Rate:", rocd, "Heading:", hdg)
print()
# print()
def calc_coordinates():
def _cprN(lat, is_odd):
nl = _cprNL(lat) - is_odd
return nl if nl > 1 else 1
def _cprNL(lat):
try:
nz = 15
a = 1 - math.cos(math.pi / (2 * nz))
b = math.cos(math.pi / 180.0 * abs(lat)) ** 2
nl = 2 * math.pi / (math.acos(1 - a/b))
return int(math.floor(nl))
except:
# happens when latitude is +/-90 degree
return 1
def floor_(x):
return int(math.floor(x))
lat1b, lon1b, alt1b = "10111000111010011", "10000110111111000", "000101111001"
lat2b, lon2b, alt2b = "10010011101011100", "10000011000011011", "000101110111"
lat1, lon1, alt1 = int(lat1b, 2), int(lon1b, 2), int(alt1b, 2)
lat2, lon2, alt2 = int(lat2b, 2), int(lon2b, 2), int(alt2b, 2)
# 131072 is 2^17, since CPR lat and lon are 17 bits each
cprlat_even, cprlon_even = lat1/131072.0, lon1/131072.0
cprlat_odd, cprlon_odd = lat2/131072.0, lon2/131072.0
print(cprlat_even, cprlon_even)
j = floor_(59*cprlat_even - 60*cprlat_odd)
print(j)
air_d_lat_even = 360.0 / 60
air_d_lat_odd = 360.0 / 59
# Lat
lat_even = float(air_d_lat_even * (j % 60 + cprlat_even))
lat_odd = float(air_d_lat_odd * (j % 59 + cprlat_odd))
if lat_even >= 270:
lat_even = lat_even - 360
if lat_odd >= 270:
lat_odd = lat_odd - 360
# Lon
ni = _cprN(lat_even, 0)
m = floor_(cprlon_even * (_cprNL(lat_even)-1) - cprlon_odd * _cprNL(lat_even) + 0.5)
lon = (360.0 / ni) * (m % ni + cprlon_even)
print("Lat", lat_even, "Lon", lon)
# Altitude
# Q-bit (bit 48) indicates whether the altitude is encoded in multiples of 25 or 100 ft (0: 100 ft, 1: 25 ft)
# The value can represent altitudes from -1000 to +50175 ft.
if alt1b[-5] == '1':
bits = alt1b[:-5] + alt1b[-4:]
n = int(bits, 2)
alt_ft = n*25 - 1000
print("Alt (ft)", alt_ft)
fs, data = wavfile.read("adsb_20190311_191728Z_1090000kHz_RF.wav")
T = 1/fs
print("Sample rate %f MS/s" % (fs / 1e6))
print("Cnt samples %d" % len(data))
print("Duration: %f s" % (T * len(data)))
data = data.astype(float)
cnt = data.shape[0]
# Processing only part on file (faster):
# cnt = 10000000
# data = data[:cnt]
print("Processing I/Q...")
I, Q = data[:, 0], data[:, 1]
A = np.sqrt(I*I + Q*Q)
bits = np.zeros(cnt)
# To see scope without any processing, uncomment
# plt.plot(A)
# plt.show()
# sys.exit(0)
print("Extracting signals...")
pos = 0
avg = 200
msg_start = 0
# Find beginning of each signal
while pos < cnt - 16*1024:
# P1 - message start
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg and pos - msg_start > 1000:
msg_start = pos
bits[pos] = 100
pos += 4
break
pos += 1
start1, start2, start3, start4 = msg_start, 0, 0, 0
# P2
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start2 = pos
bits[pos] = 90
pos += 1
break
pos += 1
# P3
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start3 = pos
bits[pos] = 80
pos += 1
break
pos += 1
# P4
while pos < cnt - 16*1024:
if A[pos] < avg and A[pos+1] > avg:
start4 = pos
bits[pos] = 70
pos += 1
break
pos += 1
sig_diff = start4 - start1
if 20 < sig_diff < 25:
bits[msg_start] = 500
bit_len = int((start4 - start1) / 4.5)
# print(pos, start1, start4, ' - ', bit_len)
# start = start1 + 8*bit_len
parse_message(A, msg_start, bit_len)
pos += 450
# For debugging: check signal start
# plt.plot(A)
# plt.plot(bits)
# plt.show()
Hoppas att någon tyckte det var intressant, tack för uppmärksamheten.
Källa: will.com
