

தானியங்கு கட்டுப்பாட்டின் கோட்பாட்டின் விரிவுரைகளின் முதல் அத்தியாயத்தை நான் வெளியிடுகிறேன், அதன் பிறகு உங்கள் வாழ்க்கை ஒருபோதும் ஒரே மாதிரியாக இருக்காது.
"தொழில்நுட்ப அமைப்புகளின் மேலாண்மை" பாடநெறியில் விரிவுரைகள் ஓலெக் ஸ்டெபனோவிச் கோஸ்லோவ் "அணு உலைகள் மற்றும் மின் உற்பத்தி நிலையங்கள்", MSTU இன் "பவர் மெக்கானிக்கல் இன்ஜினியரிங்" பீடத்தில் வழங்கப்படுகின்றன. என்.இ. பாமன். அதற்காக நான் அவருக்கு மிகவும் நன்றியுள்ளவனாக இருக்கிறேன்.
இந்த விரிவுரைகள் புத்தக வடிவில் வெளியிட தயாராகி வருகின்றன, மேலும் TAU நிபுணர்கள், மாணவர்கள் மற்றும் பாடத்தில் ஆர்வமுள்ளவர்கள் இருப்பதால், எந்த விமர்சனமும் வரவேற்கத்தக்கது.

1. தொழில்நுட்ப அமைப்புகளின் கட்டுப்பாட்டுக் கோட்பாட்டின் அடிப்படைக் கருத்துக்கள்
1.1 இலக்குகள், நிர்வாகத்தின் கொள்கைகள், மேலாண்மை அமைப்புகளின் வகைகள், அடிப்படை வரையறைகள், உதாரணங்கள்
தொழில்துறை உற்பத்தியின் வளர்ச்சி மற்றும் மேம்பாட்டிற்கு (ஆற்றல், போக்குவரத்து, இயந்திர பொறியியல், விண்வெளி தொழில்நுட்பம் போன்றவை) இயந்திரங்கள் மற்றும் அலகுகளின் உற்பத்தித்திறனில் தொடர்ச்சியான அதிகரிப்பு, தயாரிப்பு தரத்தை மேம்படுத்துதல், செலவுகளைக் குறைத்தல் மற்றும் குறிப்பாக அணுசக்தியில் கூர்மையான அதிகரிப்பு தேவைப்படுகிறது. பாதுகாப்பு (அணு, கதிர்வீச்சு, முதலியன) .d.) அணு மின் நிலையங்கள் மற்றும் அணுசக்தி நிறுவல்களின் செயல்பாடு.
தானியங்கி (மனித ஆபரேட்டரின் பங்கேற்புடன்) மற்றும் தானியங்கி (மனித ஆபரேட்டரின் பங்கேற்பு இல்லாமல்) கட்டுப்பாட்டு அமைப்புகள் (சிஎஸ்) உள்ளிட்ட நவீன கட்டுப்பாட்டு அமைப்புகளை அறிமுகப்படுத்தாமல் நிர்ணயிக்கப்பட்ட இலக்குகளை செயல்படுத்துவது சாத்தியமற்றது.
வரையறை: மேலாண்மை என்பது ஒரு குறிப்பிட்ட தொழில்நுட்ப செயல்முறையின் ஒரு அமைப்பாகும், இது ஒரு குறிப்பிட்ட இலக்கை அடைவதை உறுதி செய்கிறது.
கட்டுப்பாட்டு கோட்பாடு நவீன அறிவியல் மற்றும் தொழில்நுட்பத்தின் ஒரு கிளை ஆகும். இது அடிப்படை (பொது அறிவியல்) துறைகள் (உதாரணமாக, கணிதம், இயற்பியல், வேதியியல், முதலியன) மற்றும் பயன்பாட்டுத் துறைகள் (மின்னணுவியல், நுண்செயலி தொழில்நுட்பம், நிரலாக்கம், முதலியன) ஆகிய இரண்டையும் அடிப்படையாகக் கொண்டது.
எந்தவொரு கட்டுப்பாட்டு செயல்முறையும் (தானியங்கி) பின்வரும் முக்கிய நிலைகளைக் கொண்டுள்ளது (உறுப்புகள்):
- கட்டுப்பாட்டு பணி பற்றிய தகவல்களைப் பெறுதல்;
- நிர்வாகத்தின் முடிவு பற்றிய தகவல்களைப் பெறுதல்;
- பெறப்பட்ட தகவலின் பகுப்பாய்வு;
- முடிவை செயல்படுத்துதல் (கட்டுப்பாட்டு பொருளின் மீதான தாக்கம்).
மேலாண்மை செயல்முறையை செயல்படுத்த, மேலாண்மை அமைப்பு (CS) கொண்டிருக்க வேண்டும்:
- மேலாண்மை பணி பற்றிய தகவல் ஆதாரங்கள்;
- கட்டுப்பாட்டு முடிவுகளைப் பற்றிய தகவல்களின் ஆதாரங்கள் (பல்வேறு சென்சார்கள், அளவிடும் சாதனங்கள், கண்டுபிடிப்பாளர்கள் போன்றவை);
- பெறப்பட்ட தகவல்களை பகுப்பாய்வு செய்வதற்கும் தீர்வுகளை உருவாக்குவதற்கும் சாதனங்கள்;
- கட்டுப்பாட்டுப் பொருளில் செயல்படும் ஆக்சுவேட்டர்கள்: சீராக்கி, மோட்டார்கள், பெருக்க-மாற்றும் சாதனங்கள் போன்றவை.
வரையறை: கட்டுப்பாட்டு அமைப்பு (சிஎஸ்) மேலே உள்ள அனைத்து பகுதிகளையும் கொண்டிருந்தால், அது மூடப்படும்.
வரையறை: கட்டுப்பாட்டு முடிவுகளைப் பற்றிய தகவலைப் பயன்படுத்தி ஒரு தொழில்நுட்ப பொருளின் கட்டுப்பாடு பின்னூட்டக் கொள்கை என்று அழைக்கப்படுகிறது.
திட்டவட்டமாக, அத்தகைய கட்டுப்பாட்டு அமைப்பு பின்வருமாறு குறிப்பிடப்படலாம்:
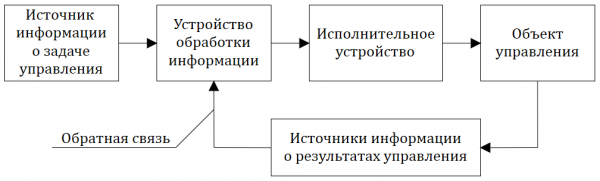
அரிசி. 1.1.1 — கட்டுப்பாட்டு அமைப்பின் அமைப்பு (MS)
கட்டுப்பாட்டு அமைப்பு (CS) ஒரு தொகுதி வரைபடம் இருந்தால், அதன் வடிவம் படம். 1.1.1, மற்றும் செயல்பாடுகள் (வேலைகள்) மனித (ஆபரேட்டர்) பங்கு இல்லாமல், பின்னர் அது அழைக்கப்படுகிறது தானியங்கி கட்டுப்பாட்டு அமைப்பு (ACS).
கட்டுப்பாட்டு அமைப்பு ஒரு நபரின் (ஆபரேட்டர்) பங்கேற்புடன் இயங்கினால், அது அழைக்கப்படுகிறது தானியங்கி கட்டுப்பாட்டு அமைப்பு.
கட்டுப்பாட்டின் முடிவுகளைப் பொருட்படுத்தாமல், ஒரு பொருளை சரியான நேரத்தில் மாற்றுவதற்கான விதியை கட்டுப்பாடு வழங்கினால், அத்தகைய கட்டுப்பாடு ஒரு திறந்த வளையத்தில் செய்யப்படுகிறது, மேலும் கட்டுப்பாடு அழைக்கப்படுகிறது. நிரல் கட்டுப்படுத்தப்படுகிறது.
திறந்த-லூப் அமைப்புகளில் தொழில்துறை இயந்திரங்கள் (கன்வேயர் லைன்கள், ரோட்டரி கோடுகள் போன்றவை), கணினி எண் கட்டுப்பாடு (CNC) இயந்திரங்கள் அடங்கும்: படம். 1.1.2.
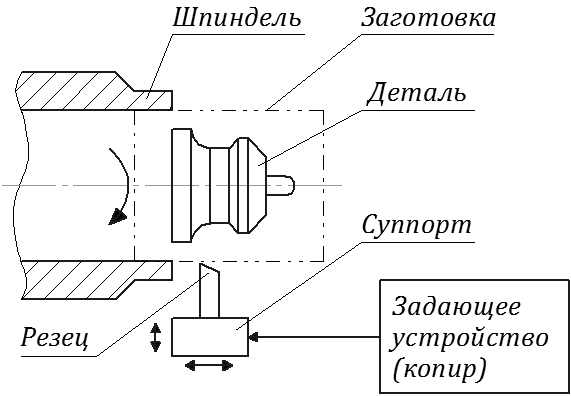
Fig.1.1.2 - நிரல் கட்டுப்பாட்டின் எடுத்துக்காட்டு
முதன்மை சாதனம், எடுத்துக்காட்டாக, ஒரு "நகலி" ஆக இருக்கலாம்.
இந்த எடுத்துக்காட்டில் உற்பத்தி செய்யப்படும் பகுதியைக் கண்காணிக்கும் சென்சார்கள் (மீட்டர்கள்) இல்லை என்பதால், எடுத்துக்காட்டாக, கட்டர் தவறாக நிறுவப்பட்டாலோ அல்லது உடைந்தாலோ, நிர்ணயிக்கப்பட்ட இலக்கை (பகுதியின் உற்பத்தி) அடைய முடியாது (உணர்ந்தால்). பொதுவாக, இந்த வகை அமைப்புகளில், வெளியீட்டு கட்டுப்பாடு தேவைப்படுகிறது, இது விரும்பிய ஒன்றிலிருந்து பகுதியின் பரிமாணங்கள் மற்றும் வடிவத்தின் விலகலை மட்டுமே பதிவு செய்யும்.
தானியங்கி கட்டுப்பாட்டு அமைப்புகள் 3 வகைகளாக பிரிக்கப்பட்டுள்ளன:
- தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS);
- தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS);
- கண்காணிப்பு அமைப்புகள் (SS).
SAR மற்றும் SS ஆகியவை SPG இன் துணைக்குழுக்கள் ==>  .
.
வரையறை: கட்டுப்பாட்டு பொருளில் உள்ள எந்தவொரு உடல் அளவின் (அளவுகளின் குழு) நிலைத்தன்மையை உறுதி செய்யும் ஒரு தானியங்கி கட்டுப்பாட்டு அமைப்பு ஒரு தானியங்கி கட்டுப்பாட்டு அமைப்பு (ACS) என அழைக்கப்படுகிறது.
தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS) மிகவும் பொதுவான வகை தானியங்கி கட்டுப்பாட்டு அமைப்புகள்.
உலகின் முதல் தானியங்கி சீராக்கி (18 ஆம் நூற்றாண்டு) வாட் ரெகுலேட்டர் ஆகும். இந்த திட்டம் (படம். 1.1.3 ஐப் பார்க்கவும்) இங்கிலாந்தில் வாட் மூலம் நீராவி இயந்திரத்தின் சக்கரத்தின் சுழற்சியின் நிலையான வேகத்தை பராமரிக்கவும், அதன்படி, டிரான்ஸ்மிஷன் கப்பி (பெல்ட்டின்) சுழற்சியின் (இயக்கம்) நிலையான வேகத்தை பராமரிக்கவும் செயல்படுத்தப்பட்டது. )
இந்த திட்டத்தில் உணர்திறன் கூறுகள் (அளவிடும் சென்சார்கள்) "எடைகள்" (கோளங்கள்). "எடைகள்" (கோளங்கள்) மேலும் ராக்கர் கை மற்றும் பின்னர் வால்வை நகர்த்த "கட்டாயப்படுத்துகிறது". எனவே, இந்த அமைப்பை நேரடி கட்டுப்பாட்டு அமைப்பாகவும், சீராக்கி என வகைப்படுத்தலாம் நேரடியாக செயல்படும் சீராக்கி, இது ஒரே நேரத்தில் "மீட்டர்" மற்றும் "ரெகுலேட்டர்" ஆகிய இரண்டின் செயல்பாடுகளையும் செய்கிறது.
நேரடியாக செயல்படும் கட்டுப்பாட்டாளர்களில் கூடுதல் ஆதாரம் ரெகுலேட்டரை நகர்த்துவதற்கு ஆற்றல் தேவையில்லை.
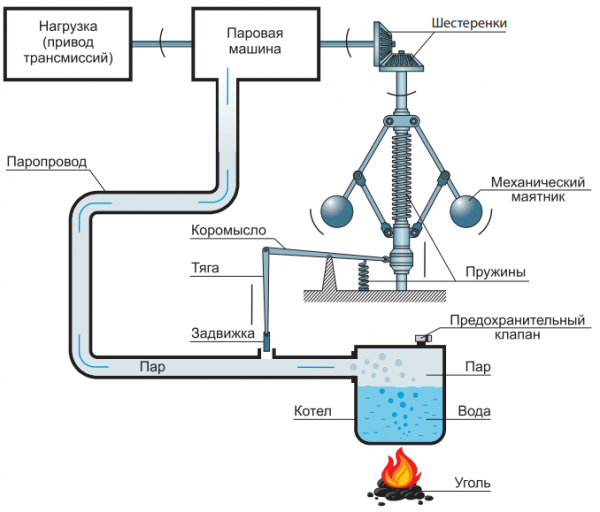
அரிசி. 1.1.3 - வாட் தானியங்கி சீராக்கி சுற்று
மறைமுக கட்டுப்பாட்டு அமைப்புகளுக்கு ஒரு பெருக்கியின் இருப்பு (இருப்பு) தேவைப்படுகிறது (எடுத்துக்காட்டாக, சக்தி), எடுத்துக்காட்டாக, மின்சார மோட்டார், சர்வோமோட்டர், ஹைட்ராலிக் டிரைவ் போன்றவற்றைக் கொண்ட கூடுதல் ஆக்சுவேட்டர்.
ஒரு தானியங்கி கட்டுப்பாட்டு அமைப்பின் (தானியங்கி கட்டுப்பாட்டு அமைப்பு) ஒரு எடுத்துக்காட்டு, இந்த வரையறையின் முழு அர்த்தத்தில், ஒரு ராக்கெட்டை சுற்றுப்பாதையில் செலுத்துவதை உறுதி செய்யும் ஒரு கட்டுப்பாட்டு அமைப்பு ஆகும், அங்கு கட்டுப்படுத்தப்பட்ட மாறி, எடுத்துக்காட்டாக, ராக்கெட்டுக்கு இடையிலான கோணம். அச்சு மற்றும் பூமிக்கு இயல்பானது ==> படம் பார்க்கவும். 1.1.4.a மற்றும் அத்தி. 1.1.4.பி
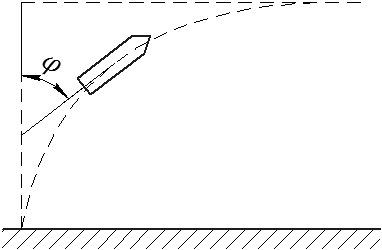
அரிசி. 1.1.4(அ)
அரிசி. 1.1.4 (ஆ)
1.2 கட்டுப்பாட்டு அமைப்புகளின் அமைப்பு: எளிய மற்றும் பல பரிமாண அமைப்புகள்
டெக்னிக்கல் சிஸ்டம்ஸ் மேனேஜ்மென்ட் கோட்பாட்டில், எந்தவொரு அமைப்பும் பொதுவாக பிணைய கட்டமைப்புகளில் இணைக்கப்பட்ட இணைப்புகளின் தொகுப்பாக பிரிக்கப்படுகிறது. எளிமையான வழக்கில், கணினி ஒரு இணைப்பைக் கொண்டுள்ளது, அதன் உள்ளீடு ஒரு உள்ளீட்டு செயலுடன் (உள்ளீடு) வழங்கப்படுகிறது, மேலும் கணினியின் பதில் (வெளியீடு) உள்ளீட்டில் பெறப்படுகிறது.
தொழில்நுட்ப அமைப்புகள் மேலாண்மை கோட்பாட்டில், கட்டுப்பாட்டு அமைப்புகளின் இணைப்புகளை பிரதிநிதித்துவப்படுத்தும் 2 முக்கிய வழிகள் பயன்படுத்தப்படுகின்றன:
- "உள்ளீடு-வெளியீடு" மாறிகளில்;
— மாநில மாறிகளில் (மேலும் விவரங்களுக்கு, பிரிவுகள் 6...7 ஐப் பார்க்கவும்).
உள்ளீடு-வெளியீடு மாறிகளில் உள்ள பிரதிநிதித்துவம் பொதுவாக ஒரு "உள்ளீடு" (ஒரு கட்டுப்பாட்டு செயல்) மற்றும் ஒரு "வெளியீடு" (ஒரு கட்டுப்படுத்தப்பட்ட மாறி, படம் 1.2.1 ஐப் பார்க்கவும்) கொண்ட ஒப்பீட்டளவில் எளிமையான அமைப்புகளை விவரிக்கப் பயன்படுகிறது.
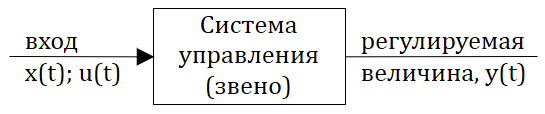
அரிசி. 1.2.1 - ஒரு எளிய கட்டுப்பாட்டு அமைப்பின் திட்டவட்டமான பிரதிநிதித்துவம்
பொதுவாக, இந்த விளக்கம் தொழில்நுட்ப ரீதியாக எளிமையான தானியங்கி கட்டுப்பாட்டு அமைப்புகளுக்கு (தானியங்கி கட்டுப்பாட்டு அமைப்புகள்) பயன்படுத்தப்படுகிறது.
சமீபத்தில், மாநில மாறிகளில் பிரதிநிதித்துவம் பரவலாகிவிட்டது, குறிப்பாக பல பரிமாண தானியங்கி கட்டுப்பாட்டு அமைப்புகள் உட்பட தொழில்நுட்ப ரீதியாக சிக்கலான அமைப்புகளுக்கு. படத்தில். 1.2.2 பல பரிமாண தானியங்கி கட்டுப்பாட்டு அமைப்பின் திட்டவட்டமான பிரதிநிதித்துவத்தைக் காட்டுகிறது u1(t)…um(t) - கட்டுப்பாட்டு நடவடிக்கைகள் (கட்டுப்பாட்டு திசையன்), y1(t)…yp(t) - ACS இன் அனுசரிப்பு அளவுருக்கள் (வெளியீட்டு திசையன்).
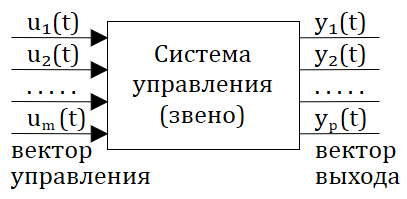
அரிசி. 1.2.2 — பல பரிமாண கட்டுப்பாட்டு அமைப்பின் திட்டவட்டமான பிரதிநிதித்துவம்
"உள்ளீடு-வெளியீடு" மாறிகள் மற்றும் ஒரு உள்ளீடு (உள்ளீடு அல்லது முதன்மை அல்லது கட்டுப்பாட்டு நடவடிக்கை) மற்றும் ஒரு வெளியீடு (வெளியீடு செயல் அல்லது கட்டுப்படுத்தப்பட்ட (அல்லது சரிசெய்யக்கூடிய) மாறி) ஆகியவற்றில் வழங்கப்பட்ட ACS கட்டமைப்பை இன்னும் விரிவாகக் கருதுவோம்.
அத்தகைய ACS இன் தொகுதி வரைபடம் ஒரு குறிப்பிட்ட எண்ணிக்கையிலான உறுப்புகளை (இணைப்புகள்) கொண்டுள்ளது என்று வைத்துக்கொள்வோம். செயல்பாட்டுக் கொள்கையின்படி இணைப்புகளை தொகுப்பதன் மூலம் (இணைப்புகள் என்ன செய்கின்றன), ACS இன் கட்டமைப்பு வரைபடத்தை பின்வரும் வழக்கமான வடிவத்திற்கு குறைக்கலாம்:
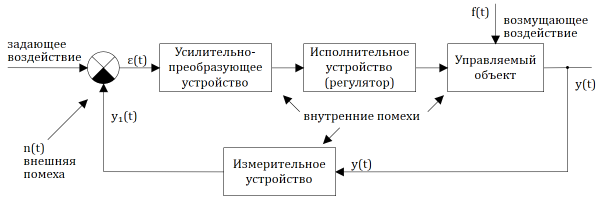
அரிசி. 1.2.3 - தானியங்கி கட்டுப்பாட்டு அமைப்பின் பிளாக் வரைபடம்
சின்னம் ε(t) அல்லது மாறி ε(t) ஒப்பிடும் சாதனத்தின் வெளியீட்டில் உள்ள பொருத்தமின்மையை (பிழை) குறிக்கிறது, இது எளிய ஒப்பீட்டு எண்கணித செயல்பாடுகள் (பெரும்பாலும் கழித்தல், குறைவாக அடிக்கடி கூட்டல்) மற்றும் மிகவும் சிக்கலான ஒப்பீட்டு செயல்பாடுகள் (செயல்முறைகள்) ஆகிய இரண்டிலும் "செயல்படும்".
முதல் y1(t) = y(t)*k1அங்கு k1 ஆதாயம், பிறகு ==>
ε(t) = x(t) - y1(t) = x(t) - k1*y(t)
கட்டுப்பாட்டு அமைப்பின் பணி (அது நிலையானதாக இருந்தால்) பொருந்தாததை (பிழை) அகற்ற "வேலை" செய்வது. ε(t), அதாவது ==> ε(t) → 0.
கட்டுப்பாட்டு அமைப்பு வெளிப்புற தாக்கங்கள் (கட்டுப்படுத்துதல், தொந்தரவு, குறுக்கீடு) மற்றும் உள் குறுக்கீடு ஆகிய இரண்டாலும் பாதிக்கப்படுகிறது என்பதை கவனத்தில் கொள்ள வேண்டும். குறுக்கீடு அதன் இருப்பின் சீரற்ற தன்மை (சீரற்ற தன்மை) மூலம் தாக்கத்திலிருந்து வேறுபடுகிறது, அதே சமயம் தாக்கம் எப்போதும் தீர்மானிக்கப்படுகிறது.
கட்டுப்பாட்டை (செட்டிங் செட்டிங்) குறிப்பிட, நாங்கள் இரண்டையும் பயன்படுத்துவோம் x (t), அல்லது u (t).
1.3 கட்டுப்பாட்டு அடிப்படை சட்டங்கள்
நாம் கடைசி உருவத்திற்குத் திரும்பினால் (படம் 1.2.3 இல் உள்ள ACS இன் தொகுதி வரைபடம்), பின்னர் பெருக்க-மாற்றும் சாதனம் (அது என்ன செயல்பாடுகளைச் செய்கிறது) வகிக்கும் பங்கை "புரிந்துகொள்ள" அவசியம்.
பெருக்க-மாற்றும் சாதனம் (ACD) பொருந்தாத சிக்னலை ε(t) மட்டுமே மேம்படுத்தினால் (அல்லது குறைக்கிறது), அதாவது:  அங்கு
அங்கு  - விகிதாசார குணகம் (குறிப்பிட்ட வழக்கில்
- விகிதாசார குணகம் (குறிப்பிட்ட வழக்கில்  = கான்ஸ்ட்), பின்னர் மூடிய-லூப் தானியங்கி கட்டுப்பாட்டு அமைப்பின் அத்தகைய கட்டுப்பாட்டு முறை ஒரு பயன்முறை என்று அழைக்கப்படுகிறது விகிதாசார கட்டுப்பாடு (பி-கட்டுப்பாடு).
= கான்ஸ்ட்), பின்னர் மூடிய-லூப் தானியங்கி கட்டுப்பாட்டு அமைப்பின் அத்தகைய கட்டுப்பாட்டு முறை ஒரு பயன்முறை என்று அழைக்கப்படுகிறது விகிதாசார கட்டுப்பாடு (பி-கட்டுப்பாடு).
கட்டுப்பாட்டு அலகு ஒரு வெளியீட்டு சமிக்ஞையை ε1(t) உருவாக்கினால், பிழை ε(t) மற்றும் ε(t) இன் ஒருங்கிணைப்புக்கு விகிதாசாரமாக இருக்கும், அதாவது.  , இந்த கட்டுப்பாட்டு முறை அழைக்கப்படுகிறது விகிதாசாரமாக-ஒருங்கிணைத்தல் (PI கட்டுப்பாடு). ==>
, இந்த கட்டுப்பாட்டு முறை அழைக்கப்படுகிறது விகிதாசாரமாக-ஒருங்கிணைத்தல் (PI கட்டுப்பாடு). ==>  அங்கு b - விகிதாசார குணகம் (குறிப்பிட்ட வழக்கில் b = கான்ஸ்ட்).
அங்கு b - விகிதாசார குணகம் (குறிப்பிட்ட வழக்கில் b = கான்ஸ்ட்).
பொதுவாக, கட்டுப்பாட்டு (ஒழுங்குமுறை) துல்லியத்தை மேம்படுத்த PI கட்டுப்பாடு பயன்படுத்தப்படுகிறது.
கட்டுப்பாட்டு அலகு ஒரு வெளியீட்டு சமிக்ஞையை ε1(t), பிழை ε(t) மற்றும் அதன் வழித்தோன்றலுக்கு விகிதாசாரமாக உருவாக்கினால், இந்த முறை அழைக்கப்படுகிறது விகிதாசாரமாக வேறுபடுத்துகிறது (PD கட்டுப்பாடு): ==> 
பொதுவாக, PD கட்டுப்பாட்டின் பயன்பாடு ACS இன் செயல்திறனை அதிகரிக்கிறது
கட்டுப்பாட்டு அலகு ஒரு வெளியீட்டு சமிக்ஞையை உருவாக்கினால் ε1(t), பிழைக்கு விகிதாசாரமாக ε(t), அதன் வழித்தோன்றல் மற்றும் பிழையின் ஒருங்கிணைப்பு ==>  , இந்த முறை அழைக்கப்படுகிறது பின்னர் இந்த கட்டுப்பாட்டு முறை அழைக்கப்படுகிறது விகிதாசார-ஒருங்கிணைந்த-வேறுபடுத்தும் கட்டுப்பாட்டு முறை (PID கட்டுப்பாடு).
, இந்த முறை அழைக்கப்படுகிறது பின்னர் இந்த கட்டுப்பாட்டு முறை அழைக்கப்படுகிறது விகிதாசார-ஒருங்கிணைந்த-வேறுபடுத்தும் கட்டுப்பாட்டு முறை (PID கட்டுப்பாடு).
PID கட்டுப்பாடு பெரும்பாலும் "நல்ல" வேகத்துடன் "நல்ல" கட்டுப்பாட்டு துல்லியத்தை வழங்க உங்களை அனுமதிக்கிறது
1.4 தானியங்கி கட்டுப்பாட்டு அமைப்புகளின் வகைப்பாடு
1.4.1. கணித விளக்கத்தின் வகையின்படி வகைப்படுத்தல்
கணித விளக்கத்தின் வகையின் அடிப்படையில் (இயக்கவியல் மற்றும் நிலையான சமன்பாடுகள்), தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS) பிரிக்கப்படுகின்றன நேரியல் и நேரியல் அல்லாத அமைப்புகள் (சுய-இயக்கப்படும் துப்பாக்கிகள் அல்லது SAR).
ஒவ்வொரு "துணைப்பிரிவு" (நேரியல் மற்றும் நேரியல் அல்லாதது) பல "துணைப்பிரிவுகளாக" பிரிக்கப்பட்டுள்ளது. எடுத்துக்காட்டாக, நேரியல் சுய இயக்கப்படும் துப்பாக்கிகள் (SAP) கணித விளக்க வகைகளில் வேறுபாடுகளைக் கொண்டுள்ளன.
இந்த செமஸ்டர் நேரியல் தானியங்கி கட்டுப்பாடு (ஒழுங்குமுறை) அமைப்புகளின் மாறும் பண்புகளை மட்டுமே கருத்தில் கொள்ளும் என்பதால், நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகளுக்கான (ACS) கணித விளக்கத்தின் வகைக்கு ஏற்ப கீழே ஒரு வகைப்பாட்டை வழங்குகிறோம்:
1) உள்ளீடு-வெளியீட்டு மாறிகளில் சாதாரண வேறுபட்ட சமன்பாடுகளால் (ODE) விவரிக்கப்பட்ட நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகள் நிரந்தர குணகங்கள்:


எங்கே x (t) - உள்ளீடு செல்வாக்கு; y (t) - வெளியீட்டு தாக்கம் (சரிசெய்யக்கூடிய மதிப்பு).
நேரியல் ODE ஐ எழுதுவதற்கான ஆபரேட்டர் (“கச்சிதமான”) வடிவத்தைப் பயன்படுத்தினால், சமன்பாடு (1.4.1) பின்வரும் வடிவத்தில் குறிப்பிடப்படலாம்:

எங்கே, p = d/dt - வேறுபாடு ஆபரேட்டர்; L(p), N(p) தொடர்புடைய நேரியல் வேறுபாடு ஆபரேட்டர்கள், அவை சமமானவை:


2) நேரியல் சாதாரண வேறுபட்ட சமன்பாடுகளால் (ODE) விவரிக்கப்பட்ட நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகள் மாறிகள் (நேரத்தில்) குணகங்கள்:


பொதுவாக, இத்தகைய அமைப்புகளை நேரியல் அல்லாத தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (NSA) என வகைப்படுத்தலாம்.
3) நேரியல் வேறுபாடு சமன்பாடுகளால் விவரிக்கப்படும் நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகள்:


எங்கே f(...) - வாதங்களின் நேரியல் செயல்பாடு; கே = 1, 2, 3… - முழு எண்கள்; Δt - அளவீட்டு இடைவெளி (மாதிரி இடைவெளி).
சமன்பாடு (1.4.4) ஒரு "கச்சிதமான" குறிப்பில் குறிப்பிடப்படலாம்:

பொதுவாக, நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகளின் (ACS) இந்த விளக்கம் டிஜிட்டல் கட்டுப்பாட்டு அமைப்புகளில் (கணினியைப் பயன்படுத்தி) பயன்படுத்தப்படுகிறது.
4) தாமதத்துடன் நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகள்:

எங்கே L(p), N(p) - நேரியல் வேறுபாடு ஆபரேட்டர்கள்; τ - தாமத நேரம் அல்லது பின்னடைவு நிலையானது.
ஆபரேட்டர்கள் என்றால் L(p) и N(p) சீரழிவு (L(p) = 1; N(p) = 1), பின்னர் சமன்பாடு (1.4.6) சிறந்த தாமத இணைப்பின் இயக்கவியலின் கணித விளக்கத்திற்கு ஒத்திருக்கிறது:

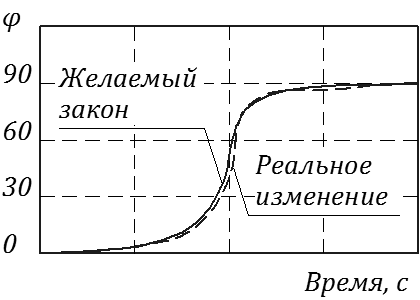
மற்றும் அதன் பண்புகளின் கிராஃபிக் விளக்கம் படத்தில் காட்டப்பட்டுள்ளது. 1.4.1
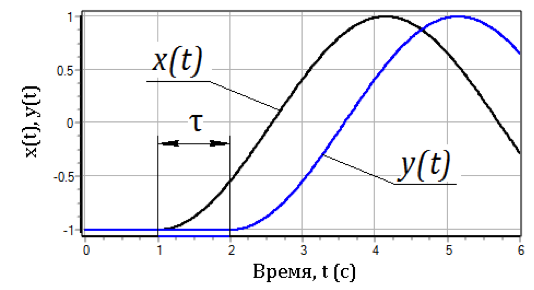
அரிசி. 1.4.1 — சிறந்த தாமத இணைப்பின் உள்ளீடு மற்றும் வெளியீட்டின் வரைபடங்கள்
5) நேரியல் வேறுபட்ட சமன்பாடுகளால் விவரிக்கப்பட்ட நேரியல் தானியங்கி கட்டுப்பாட்டு அமைப்புகள் பகுதி வழித்தோன்றல்கள். இத்தகைய சுயமாக இயக்கப்படும் துப்பாக்கிகள் பெரும்பாலும் அழைக்கப்படுகின்றன விநியோகிக்கப்பட்டது கட்டுப்பாட்டு அமைப்புகள். ==> அத்தகைய விளக்கத்தின் "சுருக்க" உதாரணம்:

சமன்பாடுகளின் அமைப்பு (1.4.7) நேரியல் முறையில் விநியோகிக்கப்படும் தானியங்கி கட்டுப்பாட்டு அமைப்பின் இயக்கவியலை விவரிக்கிறது, அதாவது. கட்டுப்படுத்தப்பட்ட அளவு நேரத்தை மட்டுமல்ல, ஒரு இடஞ்சார்ந்த ஒருங்கிணைப்பையும் சார்ந்துள்ளது.
கட்டுப்பாட்டு அமைப்பு ஒரு "ஸ்பேஷியல்" பொருளாக இருந்தால், ==>

எங்கே  ஆரம் திசையன் மூலம் தீர்மானிக்கப்படும் நேரம் மற்றும் இடஞ்சார்ந்த ஒருங்கிணைப்புகளைப் பொறுத்தது
ஆரம் திசையன் மூலம் தீர்மானிக்கப்படும் நேரம் மற்றும் இடஞ்சார்ந்த ஒருங்கிணைப்புகளைப் பொறுத்தது 
6) சுயமாக இயக்கப்படும் துப்பாக்கிகள் விவரிக்கப்பட்டுள்ளன அமைப்புகள் ODEகள், அல்லது வேறுபாடு சமன்பாடுகளின் அமைப்புகள், அல்லது பகுதி வேறுபட்ட சமன்பாடுகளின் அமைப்புகள் ==> மற்றும் பல...
நேரியல் அல்லாத தானியங்கி கட்டுப்பாட்டு அமைப்புகளுக்கு (SAP) இதே போன்ற வகைப்பாடு முன்மொழியப்படலாம்...
நேரியல் அமைப்புகளுக்கு பின்வரும் தேவைகள் பூர்த்தி செய்யப்படுகின்றன:
- ACS இன் நிலையான பண்புகளின் நேரியல்;
- இயக்கவியல் சமன்பாட்டின் நேரியல், அதாவது. மாறிகள் இயக்கவியல் சமன்பாட்டில் சேர்க்கப்பட்டுள்ளன நேரியல் கலவையில் மட்டுமே.
நிலையான குணாதிசயம் என்பது நிலையான நிலையில் உள்ளீடு செல்வாக்கின் அளவை (அனைத்து நிலையற்ற செயல்முறைகள் இறந்துவிட்டால்) வெளியீட்டின் சார்பு ஆகும்.
நிலையான குணகங்களுடன் கூடிய நேரியல் சாதாரண வேறுபாடு சமன்பாடுகளால் விவரிக்கப்படும் அமைப்புகளுக்கு, நிலையான குணாதிசயம் மாறும் சமன்பாட்டிலிருந்து (1.4.1) அனைத்து நிலையற்ற சொற்களையும் பூஜ்ஜியமாக அமைப்பதன் மூலம் பெறப்படுகிறது ==>

படம் 1.4.2 தானியங்கி கட்டுப்பாடு (ஒழுங்குமுறை) அமைப்புகளின் நேரியல் மற்றும் நேரியல் அல்லாத நிலையான பண்புகளின் எடுத்துக்காட்டுகளைக் காட்டுகிறது.
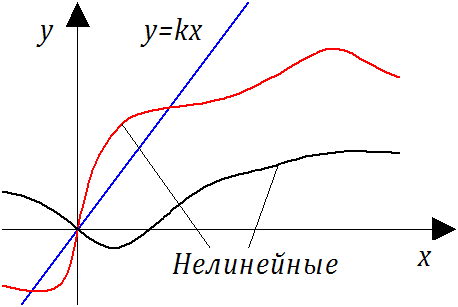
அரிசி. 1.4.2 - நிலையான நேரியல் மற்றும் நேரியல் அல்லாத பண்புகளின் எடுத்துக்காட்டுகள்
நேரியல் அல்லாத கணித செயல்பாடுகளைப் பயன்படுத்தும் போது டைனமிக் சமன்பாடுகளில் நேர வழித்தோன்றல்களைக் கொண்ட சொற்களின் நேரியல் அல்லாத தன்மை எழலாம் (*, /,  ,
,  , பாவம், எல்என், முதலியன). எடுத்துக்காட்டாக, சில "சுருக்க" சுயமாக இயக்கப்படும் துப்பாக்கியின் இயக்கவியல் சமன்பாட்டைக் கருத்தில்
, பாவம், எல்என், முதலியன). எடுத்துக்காட்டாக, சில "சுருக்க" சுயமாக இயக்கப்படும் துப்பாக்கியின் இயக்கவியல் சமன்பாட்டைக் கருத்தில்

இந்த சமன்பாட்டில், நேரியல் நிலையான பண்புடன் இருப்பதைக் கவனியுங்கள்  சமன்பாட்டின் இடது பக்கத்தில் இரண்டாவது மற்றும் மூன்றாவது சொற்கள் (டைனமிக் சொற்கள்). நேரியல் அல்லாத, எனவே இதே சமன்பாட்டால் விவரிக்கப்பட்ட ACS நேரியல் அல்லாத மாறும் திட்டம்.
சமன்பாட்டின் இடது பக்கத்தில் இரண்டாவது மற்றும் மூன்றாவது சொற்கள் (டைனமிக் சொற்கள்). நேரியல் அல்லாத, எனவே இதே சமன்பாட்டால் விவரிக்கப்பட்ட ACS நேரியல் அல்லாத மாறும் திட்டம்.
1.4.2. கடத்தப்பட்ட சமிக்ஞைகளின் தன்மைக்கு ஏற்ப வகைப்பாடு
கடத்தப்பட்ட சமிக்ஞைகளின் தன்மையின் அடிப்படையில், தானியங்கி கட்டுப்பாடு (அல்லது ஒழுங்குமுறை) அமைப்புகள் பிரிக்கப்படுகின்றன:
- தொடர்ச்சியான அமைப்புகள் (தொடர்ச்சியான அமைப்புகள்);
- ரிலே அமைப்புகள் (ரிலே செயல் அமைப்புகள்);
- தனித்துவமான செயல் அமைப்புகள் (துடிப்பு மற்றும் டிஜிட்டல்).
அமைப்பு தொடர்ச்சியான செயல்கள் அத்தகைய ACS என்று அழைக்கப்படுகிறது, அதன் ஒவ்வொரு இணைப்புகளிலும் தொடர்ச்சியான காலப்போக்கில் உள்ளீட்டு சமிக்ஞையில் மாற்றம் தொடர்ச்சிக்கு ஒத்திருக்கிறது வெளியீட்டு சமிக்ஞையில் மாற்றம், வெளியீட்டு சமிக்ஞையில் மாற்றம் விதி தன்னிச்சையாக இருக்கலாம். சுயமாக இயக்கப்படும் துப்பாக்கி தொடர்ச்சியாக இருக்க, அனைத்தின் நிலையான பண்புகள் இருப்பது அவசியம் இணைப்புகள் தொடர்ந்து இருந்தன.
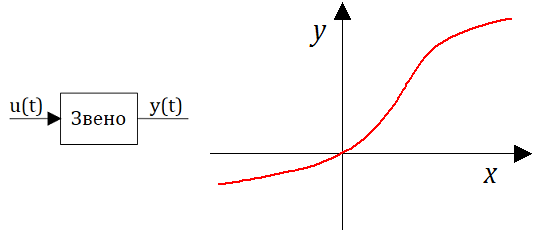
அரிசி. 1.4.3 - தொடர்ச்சியான அமைப்பின் எடுத்துக்காட்டு
அமைப்பு ரிலே செயல் ஒரு தானியங்கி கட்டுப்பாட்டு அமைப்பு என்று அழைக்கப்படுகிறது, இதில் குறைந்தபட்சம் ஒரு இணைப்பில், உள்ளீட்டு மதிப்பில் தொடர்ச்சியான மாற்றத்துடன், கட்டுப்பாட்டு செயல்முறையின் சில தருணங்களில் வெளியீட்டு மதிப்பு உள்ளீட்டு சமிக்ஞையின் மதிப்பைப் பொறுத்து "ஜம்ப்" மாறுகிறது. அத்தகைய இணைப்பின் நிலையான பண்பு உள்ளது முறிவு புள்ளிகள் அல்லது முறிவுடன் முறிவு.
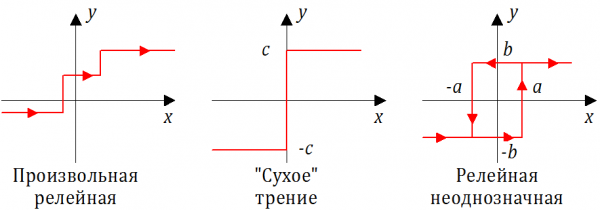
அரிசி. 1.4.4 - ரிலே நிலையான பண்புகளின் எடுத்துக்காட்டுகள்
அமைப்பு தனித்தனி செயல் என்பது குறைந்தபட்சம் ஒரு இணைப்பிலாவது, உள்ளீட்டு அளவின் தொடர்ச்சியான மாற்றத்துடன், வெளியீட்டு அளவு கொண்டிருக்கும் தனிப்பட்ட தூண்டுதல்களின் வகை, ஒரு குறிப்பிட்ட காலத்திற்கு பிறகு தோன்றும்.
தொடர்ச்சியான சமிக்ஞையை தனித்தனி சமிக்ஞையாக மாற்றும் இணைப்பு துடிப்பு இணைப்பு என்று அழைக்கப்படுகிறது. ஒரு கணினி அல்லது கட்டுப்படுத்தி கொண்ட ஒரு தானியங்கி கட்டுப்பாட்டு அமைப்பில் இதே போன்ற பரிமாற்ற சமிக்ஞைகள் நிகழ்கின்றன.
தொடர்ச்சியான உள்ளீட்டு சமிக்ஞையை துடிப்புள்ள வெளியீட்டு சமிக்ஞையாக மாற்றுவதற்கு மிகவும் பொதுவாக செயல்படுத்தப்படும் முறைகள் (அல்காரிதம்கள்):
- துடிப்பு வீச்சு பண்பேற்றம் (PAM);
- துடிப்பு அகல பண்பேற்றம் (PWM).
படத்தில். படம் 1.4.5 துடிப்பு அலைவீச்சு மாடுலேஷன் (PAM) வழிமுறையின் வரைகலை விளக்கத்தை அளிக்கிறது. படத்தின் மேல் பகுதியில். நேரம் சார்பு வழங்கப்படுகிறது x (t) - சமிக்ஞை நுழைவாயிலில் உந்துவிசை பிரிவில். துடிப்புத் தொகுதியின் வெளியீட்டு சமிக்ஞை (இணைப்பு) y (t) - உடன் தோன்றும் செவ்வக பருப்புகளின் வரிசை நிரந்தர அளவீட்டு காலம் Δt (படத்தின் கீழ் பகுதியைப் பார்க்கவும்). பருப்புகளின் கால அளவு Δ க்கு சமமாகவும் சமமாகவும் இருக்கும். தொகுதியின் வெளியீட்டில் உள்ள துடிப்பு வீச்சு இந்த தொகுதியின் உள்ளீட்டில் தொடர்ச்சியான சமிக்ஞை x(t) இன் தொடர்புடைய மதிப்புக்கு விகிதாசாரமாகும்.
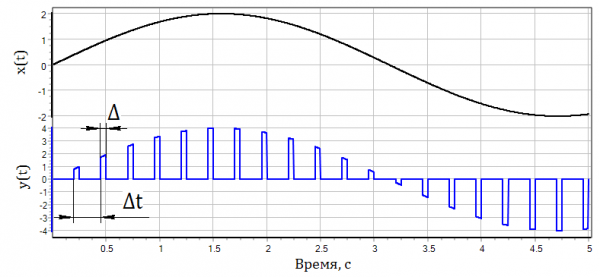
அரிசி. 1.4.5 - துடிப்பு வீச்சு பண்பேற்றத்தை செயல்படுத்துதல்
கடந்த நூற்றாண்டின் 70 களில் ... 80 களில் அணு மின் நிலையங்களின் (NPP) கட்டுப்பாட்டு மற்றும் பாதுகாப்பு அமைப்புகளின் (CPS) மின்னணு அளவீட்டு கருவிகளில் துடிப்பு பண்பேற்றத்தின் இந்த முறை மிகவும் பொதுவானது.
படத்தில். படம் 1.4.6 துடிப்பு அகல பண்பேற்றம் (PWM) அல்காரிதத்தின் வரைகலை விளக்கத்தைக் காட்டுகிறது. படத்தின் மேல் பகுதியில். 1.14 நேரத்தைச் சார்ந்திருப்பதைக் காட்டுகிறது x (t) - துடிப்பு இணைப்புக்கான உள்ளீட்டில் சமிக்ஞை. துடிப்புத் தொகுதியின் வெளியீட்டு சமிக்ஞை (இணைப்பு) y (t) - நிலையான அளவீட்டு காலத்துடன் தோன்றும் செவ்வக பருப்புகளின் வரிசை Δt (படம் 1.14 இன் கீழே பார்க்கவும்). அனைத்து துடிப்புகளின் வீச்சும் ஒன்றுதான். துடிப்பு காலம் Δt தொகுதியின் வெளியீட்டில் தொடர்ச்சியான சமிக்ஞையின் தொடர்புடைய மதிப்புக்கு விகிதாசாரமாகும் x (t) துடிப்புத் தொகுதியின் உள்ளீட்டில்.
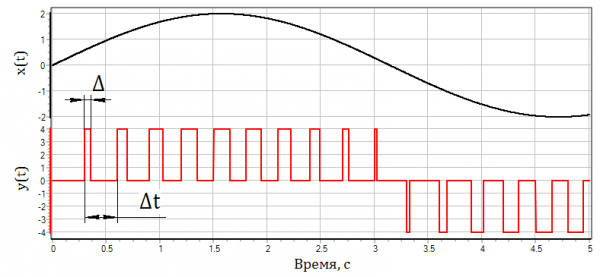
அரிசி. 1.4.6 - துடிப்பு அகல பண்பேற்றத்தை செயல்படுத்துதல்
இந்த துடிப்பு பண்பேற்றம் முறை தற்போது அணு மின் நிலையங்களின் (NPP) கட்டுப்பாடு மற்றும் பாதுகாப்பு அமைப்புகளின் (CPS) மின்னணு அளவீட்டு கருவிகள் மற்றும் பிற தொழில்நுட்ப அமைப்புகளின் ACS ஆகியவற்றில் மிகவும் பொதுவானது.
இந்த துணைப்பிரிவின் முடிவில், சுயமாக இயக்கப்படும் துப்பாக்கிகளின் (SAP) மற்ற இணைப்புகளில் பண்பு நேர மாறிலிகள் இருந்தால், கவனிக்க வேண்டும். கணிசமாக அதிகமாக Δt (அளவின் கட்டளைகளால்), பின்னர் துடிப்பு அமைப்பு ஒரு தொடர்ச்சியான தானியங்கி கட்டுப்பாட்டு அமைப்பாகக் கருதலாம் (பயன்படுத்தும் போது AIM மற்றும் PWM இரண்டும்).
1.4.3. கட்டுப்பாட்டின் இயல்பின் வகைப்பாடு
கட்டுப்பாட்டு செயல்முறைகளின் தன்மையின் அடிப்படையில், தானியங்கி கட்டுப்பாட்டு அமைப்புகள் பின்வரும் வகைகளாக பிரிக்கப்படுகின்றன:
- உறுதியான தானியங்கி கட்டுப்பாட்டு அமைப்புகள், இதில் உள்ளீட்டு சமிக்ஞையானது வெளியீட்டு சமிக்ஞையுடன் (மற்றும் நேர்மாறாகவும்) சந்தேகத்திற்கு இடமின்றி தொடர்புபடுத்தப்படலாம்;
- நிலையான ACS (புள்ளியியல், நிகழ்தகவு), இதில் ACS கொடுக்கப்பட்ட உள்ளீட்டு சமிக்ஞைக்கு "பதிலளிக்கிறது" தோராயமாக (நிலையான) வெளியீட்டு சமிக்ஞை.
வெளியீட்டு சீரற்ற சமிக்ஞை வகைப்படுத்தப்படுகிறது:
- விநியோக சட்டம்;
- கணித எதிர்பார்ப்பு (சராசரி மதிப்பு);
- சிதறல் (நிலையான விலகல்).
கட்டுப்பாட்டு செயல்முறையின் சீரற்ற தன்மை பொதுவாக கவனிக்கப்படுகிறது அடிப்படையில் நேரியல் அல்லாத ACS நிலையான குணாதிசயங்களின் பார்வையில் இருந்தும், மற்றும் இயக்கவியல் சமன்பாடுகளில் உள்ள டைனமிக் சொற்களின் நேரியல் தன்மையின் பார்வையில் இருந்து (அதிக அளவில் கூட).
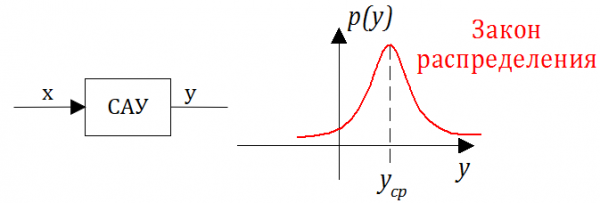
அரிசி. 1.4.7 — ஒரு சீரற்ற தானியங்கி கட்டுப்பாட்டு அமைப்பின் வெளியீட்டு மதிப்பின் விநியோகம்
கட்டுப்பாட்டு அமைப்புகளின் வகைப்பாட்டின் மேலே உள்ள முக்கிய வகைகளுக்கு கூடுதலாக, பிற வகைப்பாடுகளும் உள்ளன. எடுத்துக்காட்டாக, வகைப்பாடு கட்டுப்பாட்டு முறையின்படி மேற்கொள்ளப்படலாம் மற்றும் வெளிப்புற சூழலுடனான தொடர்பு மற்றும் சுற்றுச்சூழல் அளவுருக்களில் ஏற்படும் மாற்றங்களுக்கு ACS ஐ மாற்றியமைக்கும் திறனை அடிப்படையாகக் கொண்டது. அமைப்புகள் இரண்டு பெரிய வகுப்புகளாக பிரிக்கப்பட்டுள்ளன:
1) தழுவல் இல்லாமல் சாதாரண (சுய-சரிசெய்தல் அல்லாத) கட்டுப்பாட்டு அமைப்புகள்; இந்த அமைப்புகள் நிர்வாகச் செயல்பாட்டின் போது அவற்றின் கட்டமைப்பை மாற்றாத எளிய வகையைச் சேர்ந்தவை. அவை மிகவும் வளர்ந்த மற்றும் பரவலாகப் பயன்படுத்தப்படுகின்றன. சாதாரண கட்டுப்பாட்டு அமைப்புகள் மூன்று துணைப்பிரிவுகளாக பிரிக்கப்பட்டுள்ளன: திறந்த-லூப், மூடிய-லூப் மற்றும் ஒருங்கிணைந்த கட்டுப்பாட்டு அமைப்புகள்.
2) சுய-சரிசெய்தல் (தகவமைப்பு) கட்டுப்பாட்டு அமைப்புகள். இந்த அமைப்புகளில், கட்டுப்படுத்தப்பட்ட பொருளின் வெளிப்புற நிலைமைகள் அல்லது பண்புகள் மாறும்போது, கட்டுப்பாட்டு அமைப்பு குணகங்கள், கட்டுப்பாட்டு அமைப்பு அமைப்பு அல்லது புதிய கூறுகளின் அறிமுகம் ஆகியவற்றில் ஏற்படும் மாற்றங்கள் காரணமாக கட்டுப்பாட்டு சாதனத்தின் அளவுருக்களில் தானியங்கி (முன்பே தீர்மானிக்கப்படாத) மாற்றம் ஏற்படுகிறது. .
வகைப்பாட்டின் மற்றொரு எடுத்துக்காட்டு: ஒரு படிநிலை அடிப்படையில் (ஒரு-நிலை, இரண்டு-நிலை, பல-நிலை).
பதிவு செய்த பயனர்கள் மட்டுமே கணக்கெடுப்பில் பங்கேற்க முடியும். , தயவு செய்து.
UTS இல் விரிவுரைகளை வெளியிடுவதைத் தொடரவா?
-
88,7%ஆம்118
-
7,5%எண்10
-
3,8%எனக்குத் தெரியாது 5
133 பயனர்கள் வாக்களித்தனர். 10 பயனர்கள் வாக்களிக்கவில்லை.
ஆதாரம்: www.habr.com
