

రైల్వేలో మానవరహిత సాంకేతిక పరిజ్ఞానాల అభివృద్ధి చాలా కాలం క్రితం ప్రారంభమైంది, ఇప్పటికే 1957లో, ప్రయాణికుల రైళ్ల కోసం మొదటి ప్రయోగాత్మక ఆటోమేటెడ్ గైడెన్స్ సిస్టమ్ సృష్టించబడినప్పుడు. రైల్వే రవాణా కోసం ఆటోమేషన్ స్థాయిల మధ్య వ్యత్యాసాన్ని అర్థం చేసుకోవడానికి, IEC-62290-1 ప్రమాణంలో నిర్వచించబడిన గ్రేడేషన్ ప్రవేశపెట్టబడింది. రోడ్డు రవాణా కాకుండా, రైల్వే రవాణాలో 4 డిగ్రీల ఆటోమేషన్ ఉంటుంది, ఇది మూర్తి 1లో చూపబడింది.
 మూర్తి 1. IEC-62290 ప్రకారం ఆటోమేషన్ డిగ్రీలు
మూర్తి 1. IEC-62290 ప్రకారం ఆటోమేషన్ డిగ్రీలు
రష్యన్ రైల్వే నెట్వర్క్లో పనిచేసే దాదాపు అన్ని రైళ్లు ఆటోమేషన్ స్థాయి 1కి అనుగుణంగా భద్రతా పరికరాన్ని కలిగి ఉంటాయి. ఆటోమేషన్ లెవల్ 2 కలిగిన రైళ్లు రష్యన్ రైల్వే నెట్వర్క్లో 20 సంవత్సరాలకు పైగా విజయవంతంగా నిర్వహించబడుతున్నాయి; అనేక వేల లోకోమోటివ్లు అమర్చబడి ఉన్నాయి. ట్రాక్ సర్క్యూట్ల నుండి ఇండక్టివ్ ఛానెల్ ద్వారా స్వీకరించబడిన ఆటోమేటిక్ లోకోమోటివ్ సిగ్నలింగ్ సిస్టమ్ల షెడ్యూల్ మరియు రీడింగ్లను పరిగణనలోకి తీసుకుని, ఇచ్చిన మార్గంలో రైలు యొక్క శక్తి-సరిపోయే డ్రైవింగ్ కోసం ట్రాక్షన్ కంట్రోల్ మరియు బ్రేకింగ్ అల్గారిథమ్ల ద్వారా ఈ స్థాయి అమలు చేయబడుతుంది. స్థాయి 2 ఉపయోగం డ్రైవర్ అలసటను తగ్గిస్తుంది మరియు శక్తి వినియోగం మరియు షెడ్యూల్ అమలు యొక్క ఖచ్చితత్వంలో ప్రయోజనాలను అందిస్తుంది.
స్థాయి 3 క్యాబ్లో డ్రైవర్ లేకపోవడం సాధ్యమవుతుందని ఊహిస్తుంది, దీనికి సాంకేతిక దృష్టి వ్యవస్థను అమలు చేయడం అవసరం.
స్థాయి 4 బోర్డులో డ్రైవర్ పూర్తిగా లేకపోవడాన్ని ఊహిస్తుంది, ఇది లోకోమోటివ్ (ఎలక్ట్రిక్ రైలు) రూపకల్పనలో గణనీయమైన మార్పు అవసరం. ఉదాహరణకు, బోర్డులో సర్క్యూట్ బ్రేకర్లు ఉన్నాయి, అవి బోర్డులో వ్యక్తి లేకుండా ట్రిప్ చేయబడితే రీసెట్ చేయబడవు.
ప్రస్తుతం, 3 మరియు 4 స్థాయిలను సాధించే ప్రాజెక్ట్లు ప్రపంచంలోని ప్రముఖ కంపెనీలైన Simens, Alstom, Thales, SNCF, SBB మరియు ఇతర వాటి ద్వారా అమలు చేయబడుతున్నాయి.
సిమెన్స్ సెప్టెంబర్ 2018లో ఇన్నోట్రాన్స్ ఎగ్జిబిషన్లో డ్రైవర్లెస్ ట్రామ్ల రంగంలో తన ప్రాజెక్ట్ను ప్రదర్శించింది. ఈ ట్రామ్ 3 నుండి GoA2018 ఆటోమేషన్ స్థాయితో పోట్స్డామ్లో పని చేస్తోంది.
 మూర్తి 2 సిమెన్స్ ట్రామ్
మూర్తి 2 సిమెన్స్ ట్రామ్
2019లో, సిమెన్స్ మానవరహిత మార్గం యొక్క పొడవును 2 రెట్లు ఎక్కువ పెంచింది.
మానవ రహిత రైల్వే వాహనాలను అభివృద్ధి చేయడం ప్రారంభించిన ప్రపంచంలో మొట్టమొదటిగా రష్యన్ రైల్వేస్ కంపెనీ ఒకటి. ఈ విధంగా, 2015 లో లుజ్స్కాయ స్టేషన్లో, 3 షంటింగ్ లోకోమోటివ్ల కదలికను ఆటోమేట్ చేయడానికి ఒక ప్రాజెక్ట్ ప్రారంభించబడింది, ఇక్కడ NIIAS JSC ప్రాజెక్ట్ ఇంటిగ్రేటర్ మరియు ప్రాథమిక సాంకేతికతల డెవలపర్గా పనిచేసింది.
మానవరహిత లోకోమోటివ్ను సృష్టించడం అనేది ఇతర కంపెనీలతో సహకారం లేకుండా అసాధ్యమైన సంక్లిష్టమైన, సంక్లిష్టమైన ప్రక్రియ. అందువల్ల, లుజ్స్కాయ స్టేషన్లో, JSC NIIASతో కలిసి, ఈ క్రింది కంపెనీలు పాల్గొంటాయి:
- JSC "VNIKTI" ఆన్-బోర్డ్ కంట్రోల్ సిస్టమ్ అభివృద్ధి పరంగా;
- సిమెన్స్ - హంప్ ఆపరేషన్ (MSR-32 సిస్టమ్) ఆటోమేట్ చేయడం మరియు కార్లను నెట్టడం యొక్క ఆపరేషన్ను ఆటోమేట్ చేయడం;
- స్విచ్లు మరియు ట్రాఫిక్ లైట్లను నియంత్రించే మైక్రోప్రాసెసర్ కేంద్రీకరణ వ్యవస్థల పరంగా JSC రేడియోఏవియానిక్స్;
- PKB CT - సిమ్యులేటర్ యొక్క సృష్టి;
- ప్రాజెక్ట్ కోఆర్డినేటర్గా JSC రష్యన్ రైల్వేస్.
మొదటి దశలో, ట్రాఫిక్ ఆటోమేషన్ స్థాయి 2 సాధించడమే పని, డ్రైవర్, షంటింగ్ పనిని నిర్వహించడానికి సాధారణ పరిస్థితులలో, లోకోమోటివ్ నియంత్రణలను ఉపయోగించనప్పుడు.
సాంప్రదాయిక షంటింగ్ లోకోమోటివ్లను ఆపరేట్ చేస్తున్నప్పుడు, తగిన మార్గాలను (స్విచ్లను కదిలించడం, ట్రాఫిక్ లైట్లను ఆన్ చేయడం) సెట్ చేయడం ద్వారా డిస్పాచర్ నుండి డ్రైవర్కు వాయిస్ ఆదేశాలను ప్రసారం చేయడం ద్వారా ట్రాఫిక్ నియంత్రణ జరుగుతుంది.
స్థాయి 2 ఆటోమేషన్కు వెళ్లినప్పుడు, అన్ని వాయిస్ కమ్యూనికేషన్లు డిజిటల్ సురక్షిత రేడియో ఛానెల్ ద్వారా ప్రసారం చేయబడిన ఆదేశాల వ్యవస్థ ద్వారా భర్తీ చేయబడ్డాయి. సాంకేతికంగా, Luzhskaya స్టేషన్లో shunting లోకోమోటివ్ల నియంత్రణ దీని ఆధారంగా నిర్మించబడింది:
- స్టేషన్ యొక్క ఏకీకృత డిజిటల్ మోడల్;
- షంటింగ్ లోకోమోటివ్ల కదలికను నియంత్రించడానికి ప్రోటోకాల్ (కమాండ్లను పంపడం మరియు అమలును పర్యవేక్షించడం కోసం);
- ఇచ్చిన మార్గాలు, బాణాలు మరియు సంకేతాల స్థానం గురించి సమాచారాన్ని పొందేందుకు విద్యుత్ కేంద్రీకరణ వ్యవస్థతో పరస్పర చర్య;
- లోకోమోటివ్లను shunting కోసం స్థాన వ్యవస్థలు;
- విశ్వసనీయ డిజిటల్ రేడియో కమ్యూనికేషన్స్.
2017 నాటికి, 3 TEM-7A షంటింగ్ లోకోమోటివ్లు లుజ్స్కాయ స్టేషన్లో 95% సమయం పూర్తిగా ఆటోమేటిక్ మోడ్లో పని చేశాయి, ఈ క్రింది కార్యకలాపాలను నిర్వహిస్తాయి:
- ఇచ్చిన మార్గంలో ఆటోమేటిక్ కదలిక;
- కార్లకు ఆటోమేటిక్ యాక్సెస్;
- వ్యాగన్లతో ఆటోమేటిక్ కలపడం;
- కార్లను మూపురంపైకి నెట్టడం.
2017లో, లోకోమోటివ్లను షంటింగ్ చేయడానికి మరియు అత్యవసర పరిస్థితుల్లో రిమోట్ కంట్రోల్ని ప్రవేశపెట్టడానికి సాంకేతిక దృష్టి వ్యవస్థను రూపొందించడానికి ఒక ప్రాజెక్ట్ ప్రారంభించబడింది.
నవంబర్ 2017లో, JSC NIIAS నిపుణులు రాడార్లు, లైడార్ మరియు కెమెరాలతో కూడిన షంటింగ్ లోకోమోటివ్లపై సాంకేతిక దృష్టి వ్యవస్థ యొక్క మొదటి నమూనాను ఇన్స్టాల్ చేశారు (మూర్తి 3).
 మూర్తి 3 సాంకేతిక దృష్టి వ్యవస్థల యొక్క మొదటి సంస్కరణలు
మూర్తి 3 సాంకేతిక దృష్టి వ్యవస్థల యొక్క మొదటి సంస్కరణలు
2017 - 2018లో సాంకేతిక దృష్టి వ్యవస్థ యొక్క లుగా స్టేషన్లో పరీక్షల సమయంలో, ఈ క్రింది తీర్మానాలు చేయబడ్డాయి:
- అవరోధాలను గుర్తించడానికి రాడార్ల ఉపయోగం అసాధ్యమైనది, ఎందుకంటే రైల్వేలో మంచి పరావర్తనంతో కూడిన గణనీయమైన సంఖ్యలో లోహ వస్తువులు ఉన్నాయి. వారి నేపథ్యానికి వ్యతిరేకంగా వ్యక్తుల గుర్తింపు పరిధి 60-70 మీటర్లకు మించదు, అదనంగా, రాడార్లు తగినంత కోణీయ రిజల్యూషన్ను కలిగి ఉండవు మరియు సుమారు 1°. మా పరిశోధనలు SNCF (ఫ్రెంచ్ రైల్వే ఆపరేటర్) నుండి సహోద్యోగుల నుండి పరీక్ష ఫలితాల ద్వారా నిర్ధారించబడ్డాయి.
- లిడార్లు తక్కువ శబ్దంతో చాలా మంచి ఫలితాలను అందిస్తాయి. హిమపాతం, వర్షం లేదా పొగమంచు సంభవించినప్పుడు, వస్తువుల గుర్తింపు పరిధిలో నాన్-క్రిటికల్ తగ్గుదల గమనించబడుతుంది. అయినప్పటికీ, 2017 లో, లిడార్లు చాలా ఖరీదైనవి, ఇది ప్రాజెక్ట్ యొక్క ఆర్థిక పనితీరును గణనీయంగా ప్రభావితం చేసింది.
- కెమెరాలు సాంకేతిక దృష్టి వ్యవస్థ యొక్క ముఖ్యమైన అంశం మరియు గుర్తింపు, వస్తువు వర్గీకరణ మరియు రిమోట్ కంట్రోల్ పనుల కోసం అవసరం. రాత్రిపూట మరియు క్లిష్ట వాతావరణ పరిస్థితుల్లో పని చేయడానికి, ఇన్ఫ్రారెడ్ కెమెరాలు లేదా కెమెరాలను కలిగి ఉండటం అవసరం, ఇవి విస్తారిత తరంగదైర్ఘ్యం పరిధిని కలిగి ఉంటాయి, ఇవి సమీప-ఇన్ఫ్రారెడ్ పరిధిలో పనిచేయగలవు.
సాంకేతిక దృష్టి యొక్క ప్రధాన పని మార్గం వెంట అడ్డంకులు మరియు ఇతర వస్తువులను గుర్తించడం, మరియు కదలిక ఒక ట్రాక్ వెంట నిర్వహించబడుతుంది కాబట్టి, దానిని గుర్తించడం అవసరం.
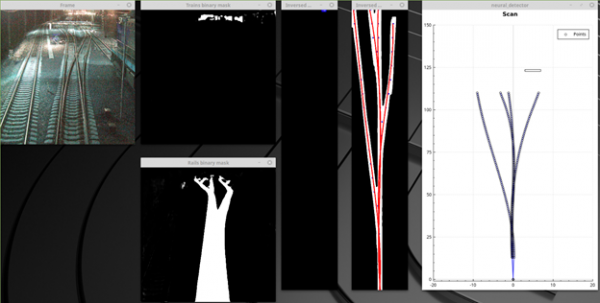 మూర్తి 4. బైనరీ మాస్క్ని ఉపయోగించి బహుళ-తరగతి విభజన (ట్రాక్, కార్లు) మరియు ట్రాక్ అక్షం యొక్క నిర్ణయం యొక్క ఉదాహరణ
మూర్తి 4. బైనరీ మాస్క్ని ఉపయోగించి బహుళ-తరగతి విభజన (ట్రాక్, కార్లు) మరియు ట్రాక్ అక్షం యొక్క నిర్ణయం యొక్క ఉదాహరణ
రూట్ డిటెక్షన్ యొక్క ఉదాహరణను మూర్తి 4 చూపిస్తుంది. బాణాల వెంట కదలిక మార్గాన్ని నిస్సందేహంగా నిర్ణయించడానికి, బాణం యొక్క స్థానం మరియు ట్రాఫిక్ లైట్ రీడింగుల గురించి ముందస్తు సమాచారం ఉపయోగించబడుతుంది, ఇది విద్యుత్ కేంద్రీకరణ వ్యవస్థ నుండి డిజిటల్ రేడియో ఛానెల్ ద్వారా ప్రసారం చేయబడుతుంది. ప్రస్తుతం, ప్రపంచ రైల్వేలలో ట్రాఫిక్ లైట్లను వదిలివేసి డిజిటల్ రేడియో ఛానల్ ద్వారా నియంత్రణ వ్యవస్థలకు మారే ధోరణి ఉంది. హై-స్పీడ్ ట్రాఫిక్కు ఇది ప్రత్యేకంగా వర్తిస్తుంది, ఎందుకంటే గంటకు 200 కిమీ కంటే ఎక్కువ వేగంతో ట్రాఫిక్ లైట్లను గమనించడం మరియు గుర్తించడం కష్టం అవుతుంది. రష్యాలో, ట్రాఫిక్ లైట్లను ఉపయోగించకుండా రెండు విభాగాలు ఉన్నాయి - మాస్కో సెంట్రల్ సర్కిల్ మరియు అల్పికా-సర్వీస్ - అడ్లెర్ లైన్.
శీతాకాలంలో, ట్రాక్ పూర్తిగా మంచు కవచంలో ఉన్నప్పుడు పరిస్థితులు తలెత్తవచ్చు మరియు మూర్తి 5లో చూపిన విధంగా ట్రాక్ను గుర్తించడం దాదాపు అసాధ్యం అవుతుంది.
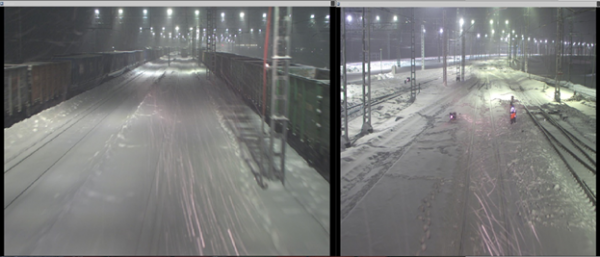 మూర్తి 5 మంచుతో కప్పబడిన ట్రాక్ యొక్క ఉదాహరణ
మూర్తి 5 మంచుతో కప్పబడిన ట్రాక్ యొక్క ఉదాహరణ
ఈ సందర్భంలో, కనుగొనబడిన వస్తువులు లోకోమోటివ్ యొక్క కదలికతో జోక్యం చేసుకుంటాయా అనేది అస్పష్టంగా మారుతుంది, అనగా అవి ట్రాక్లో ఉన్నాయా లేదా. ఈ సందర్భంలో, Luzhskaya స్టేషన్లో, స్టేషన్ యొక్క అధిక-ఖచ్చితమైన డిజిటల్ మోడల్ మరియు అధిక-ఖచ్చితమైన ఆన్-బోర్డ్ నావిగేషన్ సిస్టమ్ ఉపయోగించబడతాయి.
అంతేకాకుండా, స్టేషన్ యొక్క డిజిటల్ మోడల్ బేస్ పాయింట్ల జియోడెటిక్ కొలతల ఆధారంగా సృష్టించబడింది. అప్పుడు, అధిక-ఖచ్చితమైన పొజిషనింగ్ సిస్టమ్తో లోకోమోటివ్ల యొక్క అనేక భాగాల ప్రాసెసింగ్ ఆధారంగా, అన్ని ట్రాక్లతో పాటు మ్యాప్ పూర్తయింది.
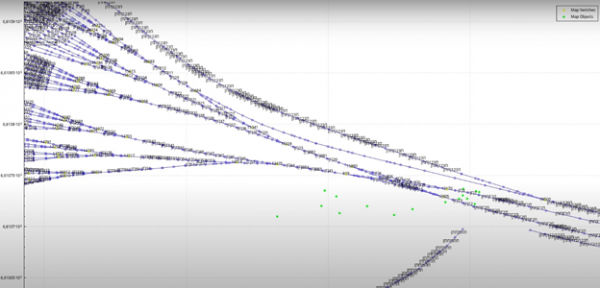 మూర్తి 6 Luzhskoy స్టేషన్ యొక్క ట్రాక్ అభివృద్ధి యొక్క డిజిటల్ నమూనా
మూర్తి 6 Luzhskoy స్టేషన్ యొక్క ట్రాక్ అభివృద్ధి యొక్క డిజిటల్ నమూనా
ఆన్-బోర్డ్ పొజిషనింగ్ సిస్టమ్ కోసం అత్యంత ముఖ్యమైన పారామితులలో ఒకటి లోకోమోటివ్ యొక్క విన్యాసాన్ని (అజిముత్) గణించడంలో లోపం. సెన్సార్లు మరియు వాటి ద్వారా గుర్తించబడిన వస్తువుల యొక్క సరైన విన్యాసానికి లోకోమోటివ్ యొక్క ధోరణి అవసరం. 1° ఓరియంటేషన్ కోణం లోపంతో, 100 మీటర్ల దూరంలో ఉన్న మార్గం అక్షానికి సంబంధించి ఆబ్జెక్ట్ కోఆర్డినేట్లలో లోపం 1,7 మీటర్లు అవుతుంది.
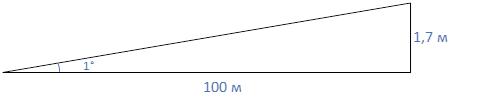 మూర్తి 7 పార్శ్వ కోఆర్డినేట్ లోపంపై ఓరియంటేషన్ లోపం ప్రభావం
మూర్తి 7 పార్శ్వ కోఆర్డినేట్ లోపంపై ఓరియంటేషన్ లోపం ప్రభావం
అందువల్ల, లోకోమోటివ్ యొక్క కోణీయ ధోరణిని కొలిచేటప్పుడు గరిష్టంగా అనుమతించదగిన లోపం 0,1° మించకూడదు. ఆన్బోర్డ్ పొజిషనింగ్ సిస్టమ్ RTK మోడ్లో రెండు డ్యూయల్-ఫ్రీక్వెన్సీ నావిగేషన్ రిసీవర్లను కలిగి ఉంటుంది, వీటిలో యాంటెన్నాలు లోకోమోటివ్ మొత్తం పొడవులో ఒక పొడవైన బేస్, స్ట్రాప్డౌన్ ఇనర్షియల్ నావిగేషన్ సిస్టమ్ మరియు వీల్ సెన్సార్లకు (ఓడోమీటర్లు) కనెక్షన్ని సృష్టించడానికి ఖాళీగా ఉంటాయి. షంటింగ్ లోకోమోటివ్ యొక్క కోఆర్డినేట్లను నిర్ణయించడంలో ప్రామాణిక విచలనం 5 సెం.మీ కంటే ఎక్కువ కాదు.
అదనంగా, Luzhskaya స్టేషన్లో, అదనపు స్థాన డేటాను పొందడానికి SLAM సాంకేతికతలను (లిడార్ మరియు విజువల్) ఉపయోగించడంపై పరిశోధన జరిగింది.
ఫలితంగా, లుజ్స్కాయా స్టేషన్లో లోకోమోటివ్లను షంటింగ్ చేయడానికి రైల్వే ట్రాక్ యొక్క నిర్ణయం ట్రాక్ గుర్తింపు మరియు స్థాన-ఆధారిత డిజిటల్ ట్రాక్ మోడల్ డేటా యొక్క ఫలితాలను కలపడం ద్వారా నిర్వహించబడుతుంది.
అడ్డంకులను గుర్తించడం కూడా దీని ఆధారంగా అనేక మార్గాల్లో నిర్వహించబడుతుంది:
- లిడార్ డేటా;
- స్టీరియో విజన్ డేటా;
- నాడీ నెట్వర్క్ల ఆపరేషన్.
డేటా యొక్క ప్రధాన వనరులలో ఒకటి లిడార్లు, ఇది లేజర్ స్కానింగ్ నుండి పాయింట్ల క్లౌడ్ను ఉత్పత్తి చేస్తుంది. వాడుకలో ఉన్న అల్గారిథమ్లు ప్రధానంగా క్లాసికల్ డేటా క్లస్టరింగ్ అల్గారిథమ్లను ఉపయోగిస్తాయి. పరిశోధనలో భాగంగా, లైడార్ పాయింట్లను క్లస్టరింగ్ చేయడానికి, అలాగే లైడార్ డేటా మరియు వీడియో కెమెరాల నుండి డేటా యొక్క ఉమ్మడి ప్రాసెసింగ్ కోసం న్యూరల్ నెట్వర్క్లను ఉపయోగించడం యొక్క ప్రభావం పరీక్షించబడుతుంది. లుజ్స్కాయా స్టేషన్లో క్యారేజ్ నేపథ్యానికి వ్యతిరేకంగా ఒక వ్యక్తి యొక్క బొమ్మను ప్రదర్శించే లిడార్ డేటా (విభిన్న రిఫ్లెక్సివిటీ ఉన్న పాయింట్ల క్లౌడ్) యొక్క ఉదాహరణను మూర్తి 8 చూపిస్తుంది.
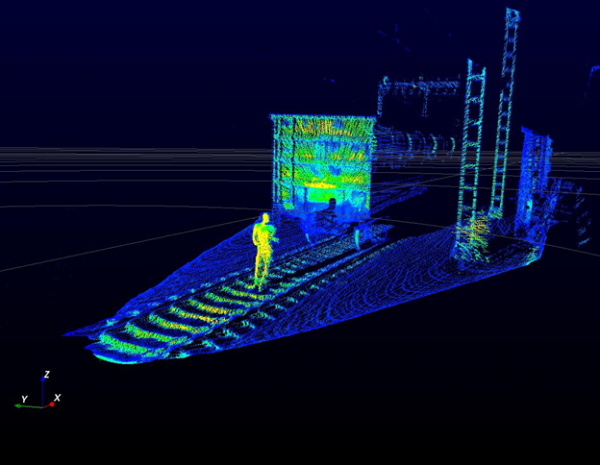 మూర్తి 8. Luzhskoy స్టేషన్ వద్ద లిడార్ డేటా యొక్క ఉదాహరణ
మూర్తి 8. Luzhskoy స్టేషన్ వద్ద లిడార్ డేటా యొక్క ఉదాహరణ
రెండు వేర్వేరు లిడార్ల నుండి డేటాను ఉపయోగించి సంక్లిష్ట-ఆకారపు కారు నుండి క్లస్టర్ను గుర్తించే ఉదాహరణను మూర్తి 9 చూపిస్తుంది.
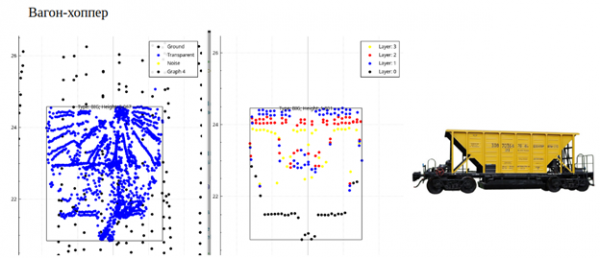 మూర్తి 9. హాప్పర్ కారు నుండి క్లస్టర్ రూపంలో లిడార్ డేటా యొక్క వివరణ యొక్క ఉదాహరణ
మూర్తి 9. హాప్పర్ కారు నుండి క్లస్టర్ రూపంలో లిడార్ డేటా యొక్క వివరణ యొక్క ఉదాహరణ
విడిగా, ఇటీవల లిడార్ల ధర దాదాపుగా పరిమాణంలో పడిపోయిందని మరియు వాటి సాంకేతిక లక్షణాలు పెరిగాయని గమనించాలి. ఇదే ట్రెండ్ కొనసాగుతుందనడంలో సందేహం లేదు. లుజ్స్కాయా స్టేషన్లో ఉపయోగించే లిడార్ల ద్వారా వస్తువులను గుర్తించే పరిధి సుమారు 150 మీటర్లు.
అడ్డంకులను గుర్తించడానికి వేరొక భౌతిక సూత్రాన్ని ఉపయోగించే స్టీరియో కెమెరా కూడా ఉపయోగించబడుతుంది.
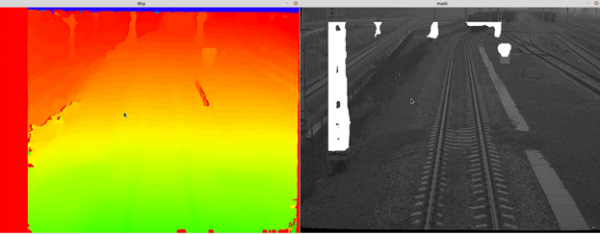 మూర్తి 10. స్టీరియో జత మరియు గుర్తించబడిన క్లస్టర్ల నుండి అసమానత మ్యాప్
మూర్తి 10. స్టీరియో జత మరియు గుర్తించబడిన క్లస్టర్ల నుండి అసమానత మ్యాప్
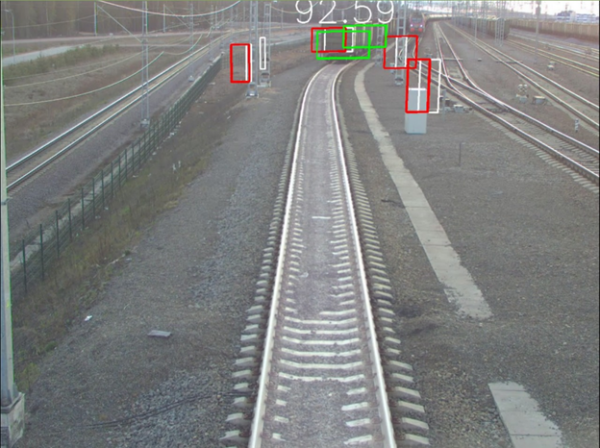
స్తంభాలు, ట్రాక్ బాక్స్లు మరియు క్యారేజీని గుర్తించే స్టీరియో కెమెరా డేటా యొక్క ఉదాహరణను మూర్తి 10 చూపిస్తుంది.
బ్రేకింగ్ కోసం తగినంత దూరంలో పాయింట్ క్లౌడ్ యొక్క తగినంత ఖచ్చితత్వాన్ని పొందేందుకు, అధిక రిజల్యూషన్ కెమెరాలను ఉపయోగించడం అవసరం. చిత్ర పరిమాణాన్ని పెంచడం వలన అసమానత మ్యాప్ను పొందేందుకు గణన ఖర్చు పెరుగుతుంది. ఆక్రమిత వనరులు మరియు సిస్టమ్ ప్రతిస్పందన సమయానికి అవసరమైన పరిస్థితుల కారణంగా, వీడియో కెమెరాల నుండి ఉపయోగకరమైన డేటాను సంగ్రహించడానికి అల్గోరిథంలు మరియు విధానాలను నిరంతరం అభివృద్ధి చేయడం మరియు పరీక్షించడం అవసరం.
అల్గారిథమ్ల పరీక్ష మరియు ధృవీకరణలో కొంత భాగం రైల్వే సిమ్యులేటర్ని ఉపయోగించి నిర్వహించబడుతుంది, దీనిని JSC NIIASతో కలిసి PKB TsT అభివృద్ధి చేస్తోంది. ఉదాహరణకు, స్టీరియో కెమెరా అల్గారిథమ్ల పనితీరును పరీక్షించడానికి సిమ్యులేటర్ను ఉపయోగించడాన్ని మూర్తి 11 చూపుతుంది.
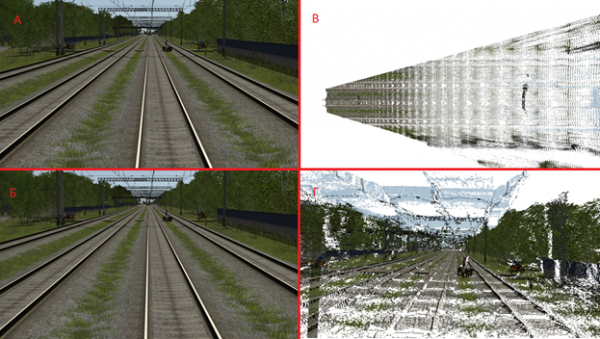 మూర్తి 11. A, B - సిమ్యులేటర్ నుండి ఎడమ మరియు కుడి ఫ్రేమ్లు; B - స్టీరియో కెమెరా నుండి డేటా పునర్నిర్మాణం యొక్క టాప్ వీక్షణ; D - సిమ్యులేటర్ నుండి స్టీరియో కెమెరా చిత్రాల పునర్నిర్మాణం.
మూర్తి 11. A, B - సిమ్యులేటర్ నుండి ఎడమ మరియు కుడి ఫ్రేమ్లు; B - స్టీరియో కెమెరా నుండి డేటా పునర్నిర్మాణం యొక్క టాప్ వీక్షణ; D - సిమ్యులేటర్ నుండి స్టీరియో కెమెరా చిత్రాల పునర్నిర్మాణం.
న్యూరల్ నెట్వర్క్ల యొక్క ప్రధాన పని వ్యక్తులు, కార్లు మరియు వారి వర్గీకరణను గుర్తించడం.
కఠినమైన వాతావరణ పరిస్థితుల్లో పనిచేయడానికి, JSC NIIAS నిపుణులు కూడా ఇన్ఫ్రారెడ్ కెమెరాలను ఉపయోగించి పరీక్షలు నిర్వహించారు.
 మూర్తి 12. IR కెమెరా నుండి డేటా
మూర్తి 12. IR కెమెరా నుండి డేటా
అన్ని సెన్సార్ల నుండి డేటా అసోసియేషన్ అల్గారిథమ్ల ఆధారంగా ఏకీకృతం చేయబడుతుంది, ఇక్కడ అడ్డంకులు (వస్తువులు) ఉనికి యొక్క సంభావ్యత అంచనా వేయబడుతుంది.
అంతేకాకుండా, ట్రాక్లోని అన్ని వస్తువులు అడ్డంకులు కావు; షంటింగ్ కార్యకలాపాలను నిర్వహిస్తున్నప్పుడు, లోకోమోటివ్ ఆటోమేటిక్గా కార్లతో జతచేయాలి.
 మూర్తి 13. వివిధ సెన్సార్ల ద్వారా అడ్డంకిని గుర్తించే కారుకు సంబంధించిన విధానం యొక్క విజువలైజేషన్ యొక్క ఉదాహరణ
మూర్తి 13. వివిధ సెన్సార్ల ద్వారా అడ్డంకిని గుర్తించే కారుకు సంబంధించిన విధానం యొక్క విజువలైజేషన్ యొక్క ఉదాహరణ
మానవరహిత షంటింగ్ లోకోమోటివ్లను నిర్వహిస్తున్నప్పుడు, పరికరాలతో ఏమి జరుగుతుందో మరియు అది ఏ స్థితిలో ఉందో త్వరగా అర్థం చేసుకోవడం చాలా ముఖ్యం. లోకోమోటివ్ ముందు కుక్క వంటి జంతువు కనిపించినప్పుడు కూడా పరిస్థితులు సాధ్యమే. ఆన్బోర్డ్ అల్గారిథమ్లు ఆటోమేటిక్గా లోకోమోటివ్ను ఆపివేస్తాయి, అయితే కుక్క దారిలో నుండి కదలకపోతే తర్వాత ఏమి చేయాలి?
విమానంలోని పరిస్థితిని పర్యవేక్షించడానికి మరియు అత్యవసర పరిస్థితుల్లో నిర్ణయాలు తీసుకోవడానికి, స్టేషన్లోని అన్ని మానవరహిత లోకోమోటివ్లతో పనిచేసేలా రూపొందించబడిన స్థిరమైన రిమోట్ కంట్రోల్ మరియు మానిటరింగ్ ప్యానెల్ అభివృద్ధి చేయబడింది. Luzhskaya స్టేషన్ వద్ద ఇది EC పోస్ట్ వద్ద ఉంది.
 మూర్తి 14 రిమోట్ కంట్రోల్ మరియు పర్యవేక్షణ
మూర్తి 14 రిమోట్ కంట్రోల్ మరియు పర్యవేక్షణ
Luzhskoy స్టేషన్ వద్ద, Figure 14 చూపిన నియంత్రణ ప్యానెల్ మూడు shunting లోకోమోటివ్స్ ఆపరేషన్ నియంత్రిస్తుంది. అవసరమైతే, ఈ రిమోట్ కంట్రోల్ని ఉపయోగించి మీరు నిజ సమయంలో సమాచారాన్ని ప్రసారం చేయడం ద్వారా కనెక్ట్ చేయబడిన లోకోమోటివ్లలో ఒకదానిని నియంత్రించవచ్చు (రేడియో ఛానెల్ ద్వారా డేటా ట్రాన్స్మిషన్ను పరిగణనలోకి తీసుకుని 300 ms కంటే ఎక్కువ ఆలస్యం చేయకూడదు).
ఫంక్షనల్ భద్రతా సమస్యలు
మానవరహిత లోకోమోటివ్లను పరిచయం చేసేటప్పుడు అత్యంత ముఖ్యమైన సమస్య ఫంక్షనల్ సేఫ్టీ సమస్య, IEC 61508 "భద్రతకు సంబంధించిన విద్యుత్, ఎలక్ట్రానిక్, ప్రోగ్రామబుల్ ఎలక్ట్రానిక్ సిస్టమ్స్ యొక్క ఫంక్షనల్ సేఫ్టీ" (EN50126, EN50128, EN50129), GOST 33435-2015 ప్రమాణాల ద్వారా నిర్వచించబడింది. రైల్వే రోలింగ్ స్టాక్ నియంత్రణ, పర్యవేక్షణ మరియు భద్రత కోసం".
ఆన్-బోర్డ్ భద్రతా పరికరాల అవసరాలకు అనుగుణంగా, భద్రతా సమగ్రత స్థాయి 4 (SIL4) సాధించాలి.
SIL-4 స్థాయికి అనుగుణంగా, ఇప్పటికే ఉన్న అన్ని లోకోమోటివ్ భద్రతా పరికరాలు మెజారిటీ లాజిక్ని ఉపయోగించి నిర్మించబడ్డాయి, ఇక్కడ లెక్కలు రెండు ఛానెల్లలో (లేదా అంతకంటే ఎక్కువ) సమాంతరంగా నిర్వహించబడతాయి మరియు ఫలితాలు ఒక నిర్ణయం తీసుకోవడానికి సరిపోల్చబడతాయి.
మానవరహిత షంటింగ్ లోకోమోటివ్లపై సెన్సార్ల నుండి డేటాను ప్రాసెస్ చేయడానికి కంప్యూటింగ్ యూనిట్ కూడా తుది ఫలితం యొక్క పోలికతో రెండు-ఛానల్ స్కీమ్ను ఉపయోగించి నిర్మించబడింది.
దృష్టి సెన్సార్ల ఉపయోగం, వివిధ వాతావరణ పరిస్థితులలో మరియు వివిధ వాతావరణాలలో ఆపరేషన్ మానవరహిత వాహనాల భద్రతను నిరూపించే సమస్యకు కొత్త విధానం అవసరం.
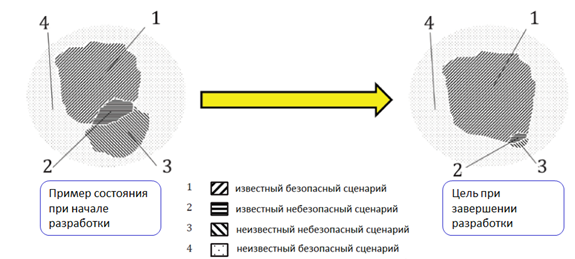
2019లో, ISO/PAS 21448 ప్రమాణం “రోడ్ వాహనాలు. నిర్వచించిన విధుల భద్రత (SOTIF). ఈ ప్రమాణం యొక్క ప్రధాన సూత్రాలలో ఒకటి సినారియో విధానం, ఇది వివిధ పరిస్థితులలో వ్యవస్థ యొక్క ప్రవర్తనను పరిశీలిస్తుంది. మొత్తం దృశ్యాల సంఖ్య అనంతాన్ని సూచిస్తుంది. తెలిసిన అసురక్షిత దృశ్యాలు మరియు తెలియని అసురక్షిత దృశ్యాలను సూచించే 2 మరియు 3 ప్రాంతాలను తగ్గించడం ప్రధాన డిజైన్ సవాలు.
 మూర్తి 15 అభివృద్ధి ఫలితంగా దృశ్యాల రూపాంతరం
మూర్తి 15 అభివృద్ధి ఫలితంగా దృశ్యాల రూపాంతరం
ఈ విధానం యొక్క అనువర్తనంలో భాగంగా, JSC NIIAS నిపుణులు 2017లో ఆపరేషన్ ప్రారంభించినప్పటి నుండి అన్ని ఉద్భవిస్తున్న పరిస్థితులను (దృష్టాంతాలు) విశ్లేషించారు. నిజమైన ఆపరేషన్లో ఎదుర్కోవడం కష్టంగా ఉండే కొన్ని పరిస్థితులు PKB CT సిమ్యులేటర్ని ఉపయోగించి పని చేస్తాయి.
రెగ్యులేటరీ సమస్యలు
లోకోమోటివ్ క్యాబిన్లో డ్రైవర్ లేకుండా పూర్తిగా ఆటోమేటిక్ కంట్రోల్కి పూర్తిగా మారడానికి, నియంత్రణ సమస్యలను పరిష్కరించడం కూడా అవసరం.
ప్రస్తుతానికి, JSC రష్యన్ రైల్వేలు ఆటోమేటిక్ మోడ్లో రైల్వే రోలింగ్ స్టాక్ కోసం నియంత్రణ వ్యవస్థల అమలు కోసం చర్యల అమలు కోసం రెగ్యులేటరీ మద్దతుపై పని అమలు కోసం షెడ్యూల్ను ఆమోదించింది. రైల్వే రవాణాలో ఉత్పత్తికి సంబంధం లేని పౌరుల జీవితానికి లేదా ఆరోగ్యానికి హాని కలిగించే రవాణా సంఘటనల అధికారిక దర్యాప్తు మరియు రికార్డింగ్ ప్రక్రియపై నిబంధనలను నవీకరించడం చాలా ముఖ్యమైన సమస్యలలో ఒకటి. ఈ ప్రణాళికకు అనుగుణంగా, 2021లో మానవరహిత రైల్వే వాహనాల నిర్వహణను నియంత్రించే పత్రాల ప్యాకేజీని అభివృద్ధి చేసి ఆమోదించాలి.
తరువాతి మాట
ప్రస్తుతానికి, లుజ్స్కాయ స్టేషన్లో నిర్వహించబడుతున్న మానవరహిత షంటింగ్ లోకోమోటివ్ల ప్రపంచంలో అనలాగ్లు లేవు. ఫ్రాన్స్ (SNCF కంపెనీ), జర్మనీ, హాలండ్ (ప్రోరైల్ కంపెనీ), బెల్జియం (లీనియాస్ కంపెనీ) నిపుణులు 2018-2019లో అభివృద్ధి చెందిన నియంత్రణ వ్యవస్థతో సుపరిచితులు అయ్యారు మరియు ఇలాంటి వ్యవస్థలను అమలు చేయడానికి ఆసక్తి కలిగి ఉన్నారు. JSC NIIAS యొక్క ప్రధాన పని ఏమిటంటే, రష్యన్ రైల్వేలు మరియు విదేశీ కంపెనీల కోసం కార్యాచరణను విస్తరించడం మరియు సృష్టించిన నిర్వహణ వ్యవస్థను పునరావృతం చేయడం.
ప్రస్తుతం, JSC రష్యన్ రైల్వేలు మానవరహిత ఎలక్ట్రిక్ రైళ్ల "లాస్టోచ్కా" ను అభివృద్ధి చేసే ప్రాజెక్ట్కు నాయకత్వం వహిస్తున్నాయి. ఫ్రేమ్వర్క్లో ఆగస్టు 16లో ES2G లాస్టోచ్కా ఎలక్ట్రిక్ రైలు కోసం ప్రోటోటైప్ ఆటోమేటిక్ కంట్రోల్ సిస్టమ్ యొక్క ప్రదర్శనను మూర్తి 2019 చూపిస్తుంది. అంతర్జాతీయ రైల్వే సలోన్ స్పేస్ 1520 "PRO//Movement.Expo".
 మూర్తి 16. MCCలో మానవరహిత విద్యుత్ రైలు యొక్క ఆపరేషన్ యొక్క ప్రదర్శన
మూర్తి 16. MCCలో మానవరహిత విద్యుత్ రైలు యొక్క ఆపరేషన్ యొక్క ప్రదర్శన
అధిక వేగం, ముఖ్యమైన బ్రేకింగ్ దూరాలు మరియు ఆపే పాయింట్ల వద్ద ప్రయాణీకులను సురక్షితంగా బోర్డింగ్/దింగేలా చేయడం వల్ల మానవరహిత విద్యుత్ రైలును రూపొందించడం చాలా కష్టమైన పని. ప్రస్తుతం, MCCలో పరీక్షలు చురుకుగా జరుగుతున్నాయి. ఈ ప్రాజెక్ట్కి సంబంధించిన కథనాన్ని సమీప భవిష్యత్తులో ప్రచురించడానికి ప్లాన్ చేస్తున్నారు.
మూలం: www.habr.com
