


เราได้พูดคุยเกี่ยวกับวิธีการทำงานของบัสและโปรโตคอลในระบบอัตโนมัติทางอุตสาหกรรม ครั้งนี้เราจะมุ่งเน้นไปที่โซลูชั่นการทำงานที่ทันสมัย: เราจะดูว่าโปรโตคอลใดบ้างที่ใช้ในระบบทั่วโลก ลองพิจารณาเทคโนโลยีของบริษัทเยอรมัน Beckhoff และ Siemens, B&R ของออสเตรีย, American Rockwell Automation และ Fastwel ของรัสเซีย นอกจากนี้เรายังจะศึกษาโซลูชันสากลที่ไม่เชื่อมโยงกับผู้ผลิตรายใดรายหนึ่ง เช่น EtherCAT และ CAN
ในตอนท้ายของบทความจะมีตารางเปรียบเทียบกับคุณลักษณะของโปรโตคอล EtherCAT, POWERLINK, PROFINET, EtherNet/IP และ ModbusTCP
เราไม่ได้รวม PRP, HSR, OPC UA และโปรโตคอลอื่นๆ ในการทบทวน เนื่องจาก มีบทความดีๆ เกี่ยวกับ Habré อยู่แล้วโดยเพื่อนวิศวกรของเราที่กำลังพัฒนาระบบอัตโนมัติทางอุตสาหกรรม ตัวอย่างเช่น, и .
ขั้นแรก เรามานิยามคำศัพท์กันก่อน: Industrial Ethernet = เครือข่ายอุตสาหกรรม, Fieldbus = ฟิลด์บัส ในระบบอัตโนมัติทางอุตสาหกรรมของรัสเซีย มีความสับสนในแง่ที่เกี่ยวข้องกับฟิลด์บัสและเครือข่ายอุตสาหกรรมระดับล่าง บ่อยครั้งที่คำเหล่านี้รวมกันเป็นแนวคิดเดียวที่คลุมเครือเรียกว่า "ระดับล่าง" ซึ่งเรียกว่าทั้งฟิลด์บัสและบัสระดับย่อย แม้ว่ามันอาจจะไม่ใช่บัสเลยก็ตาม
ทำไมเป็นเช่นนั้นความสับสนนี้น่าจะเกิดจากการที่ตัวควบคุมสมัยใหม่จำนวนมาก การเชื่อมต่อโมดูล I/O มักจะดำเนินการโดยใช้แบ็คเพลนหรือฟิสิคัลบัส นั่นคือหน้าสัมผัสบัสและตัวเชื่อมต่อบางตัวใช้เพื่อรวมโมดูลหลายตัวไว้ในยูนิตเดียว แต่ในทางกลับกัน โหนดดังกล่าวสามารถเชื่อมต่อถึงกันได้ด้วยเครือข่ายอุตสาหกรรมและฟิลด์บัส ในคำศัพท์ทางตะวันตกมีการแบ่งแยกที่ชัดเจน: เครือข่ายคือเครือข่าย บัสก็คือบัส อันแรกถูกกำหนดโดยคำว่า Industrial Ethernet ส่วนอันที่สองกำหนดโดย Fieldbus บทความนี้เสนอให้ใช้คำว่า "เครือข่ายอุตสาหกรรม" และคำว่า "ฟิลด์บัส" สำหรับแนวคิดเหล่านี้ ตามลำดับ
มาตรฐานเครือข่ายอุตสาหกรรม EtherCAT พัฒนาโดย Beckhoff
โปรโตคอล EtherCAT และเครือข่ายอุตสาหกรรมอาจเป็นหนึ่งในวิธีการส่งข้อมูลที่เร็วที่สุดในระบบอัตโนมัติในปัจจุบัน เครือข่าย EtherCAT ประสบความสำเร็จในการใช้งานในระบบอัตโนมัติแบบกระจาย โดยโหนดที่มีการโต้ตอบจะถูกแยกออกจากกันในระยะทางไกล
โปรโตคอล EtherCAT ใช้เฟรมอีเทอร์เน็ตมาตรฐานในการส่งโทรเลข ดังนั้นจึงยังคงเข้ากันได้กับอุปกรณ์อีเธอร์เน็ตมาตรฐานใดๆ และในความเป็นจริง การรับและส่งข้อมูลสามารถจัดระเบียบได้บนตัวควบคุมอีเทอร์เน็ตใดๆ ก็ตาม โดยมีซอฟต์แวร์ที่เหมาะสม

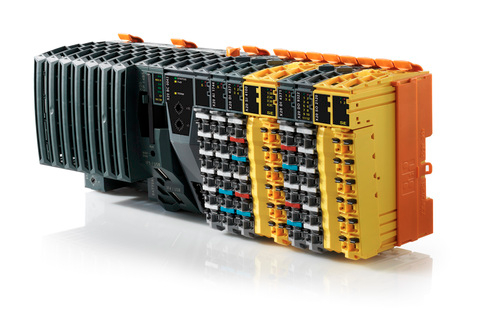
คอนโทรลเลอร์ Beckhoff พร้อมชุดโมดูล I/O แหล่งที่มา:
ข้อกำหนดโปรโตคอลเปิดและพร้อมใช้งาน แต่อยู่ภายในกรอบของสมาคมการพัฒนา - EtherCAT Technology Group เท่านั้น
นี่คือวิธีการทำงานของ EtherCAT (เป็นภาพที่น่าหลงใหล เช่นเดียวกับเกม Zuma Inca):
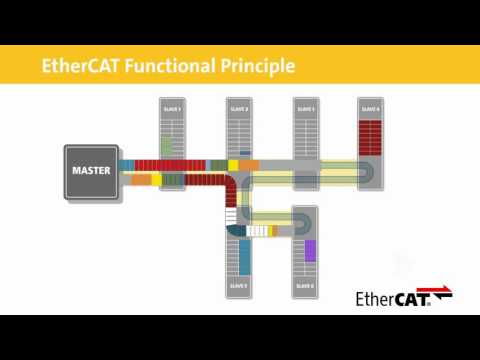
ความเร็วในการแลกเปลี่ยนที่สูงในโปรโตคอลนี้ - และเราสามารถพูดคุยเกี่ยวกับหน่วยไมโครวินาที - เกิดขึ้นได้เนื่องจากนักพัฒนาปฏิเสธที่จะแลกเปลี่ยนโดยใช้โทรเลขที่ส่งโดยตรงไปยังอุปกรณ์เฉพาะ แต่จะมีการส่งโทรเลขหนึ่งรายการไปยังเครือข่าย EtherCAT ซึ่งส่งไปยังอุปกรณ์ทั้งหมดในเวลาเดียวกัน แต่ละโหนดทาสสำหรับการรวบรวมและส่งข้อมูล (มักเรียกว่า OSO - อุปกรณ์สื่อสารวัตถุ) นำมาจากมัน "ทันที" ข้อมูลที่มีไว้เพื่อมันและแทรกข้อมูลที่เขาพร้อมที่จะแลกเปลี่ยนลงในโทรเลข จากนั้นโทรเลขจะถูกส่งไปยังโหนดทาสถัดไปซึ่งมีการดำเนินการเดียวกันเกิดขึ้น หลังจากผ่านอุปกรณ์ควบคุมทั้งหมดแล้ว โทรเลขจะถูกส่งกลับไปยังตัวควบคุมหลัก ซึ่งใช้ตรรกะการควบคุมตามข้อมูลที่ได้รับจากอุปกรณ์ทาส และโต้ตอบอีกครั้งผ่านโทรเลขกับโหนดทาส ซึ่งจะส่งสัญญาณควบคุมไปที่ อุปกรณ์.
เครือข่าย EtherCAT สามารถมีโทโพโลยีใดก็ได้ แต่โดยพื้นฐานแล้วมันจะเป็นวงแหวนเสมอ - เนื่องจากการใช้โหมดฟูลดูเพล็กซ์และตัวเชื่อมต่ออีเทอร์เน็ตสองตัว ด้วยวิธีนี้ โทรเลขจะถูกส่งตามลำดับไปยังอุปกรณ์แต่ละชิ้นบนรถบัสเสมอ
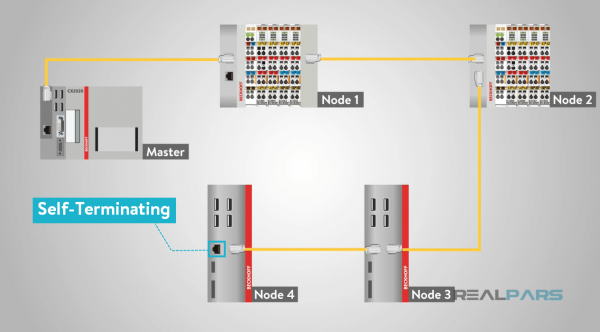
การแสดงแผนผังของเครือข่าย Ethercat ที่มีหลายโหนด แหล่งที่มา:
อย่างไรก็ตาม ข้อกำหนด EtherCAT ไม่มีข้อจำกัดเกี่ยวกับฟิสิคัลเลเยอร์ 100Base-TX ดังนั้นการใช้งานโปรโตคอลจึงเป็นไปได้ตามกิกะบิตและสายออปติคัล
เครือข่ายอุตสาหกรรมแบบเปิดและมาตรฐาน PROFIBUS/NET จาก Siemens
ข้อกังวลของชาวเยอรมัน Siemens เป็นที่รู้จักมายาวนานในเรื่องของตัวควบคุมลอจิกแบบตั้งโปรแกรมได้ (PLC) ซึ่งใช้กันทั่วโลก
การแลกเปลี่ยนข้อมูลระหว่างโหนดของระบบอัตโนมัติที่ควบคุมโดยอุปกรณ์ของ Siemens ดำเนินการทั้งผ่านฟิลด์บัสที่เรียกว่า PROFIBUS และในเครือข่ายอุตสาหกรรม PROFINET
บัส PROFIBUS ใช้สายเคเบิลสองคอร์พิเศษพร้อมขั้วต่อ DB-9 Siemens มีสีม่วง แต่เราเคยเห็นยี่ห้ออื่นในทางปฏิบัติแล้ว :) ในการเชื่อมต่อหลายโหนด ตัวเชื่อมต่อสามารถเชื่อมต่อสายเคเบิลสองเส้นได้ นอกจากนี้ยังมีสวิตช์สำหรับตัวต้านทานขั้วต่ออีกด้วย จะต้องเปิดตัวต้านทานเทอร์มินัลที่อุปกรณ์ปลายทางของเครือข่ายซึ่งบ่งชี้ว่านี่คืออุปกรณ์แรกหรือสุดท้ายและหลังจากนั้นไม่มีอะไรเลย มีเพียงความมืดและความว่างเปล่า (rs485 ทั้งหมดทำงานเช่นนี้) หากคุณเปิดตัวต้านทานบนขั้วต่อระดับกลาง ส่วนต่อไปนี้จะถูกปิด

สาย PROFIBUS พร้อมขั้วต่อเชื่อมต่อ แหล่งที่มา:
เครือข่าย PROFINET ใช้สายคู่บิดเกลียวแบบอะนาล็อก โดยปกติจะใช้ขั้วต่อ RJ-45 สายเคเบิลจะเป็นสีเขียว หากโทโพโลยีของ PROFIBUS เป็นบัส โทโพโลยีของเครือข่าย PROFINET อาจเป็นอะไรก็ได้: วงแหวน ดาว ต้นไม้ หรือทุกสิ่งรวมกัน
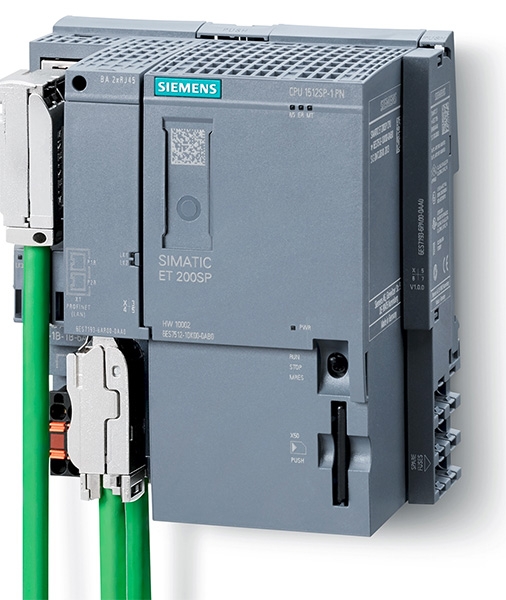
คอนโทรลเลอร์ Siemens พร้อมสาย PROFINET ที่เชื่อมต่ออยู่ ที่มา: w3.siemens.com
มีโปรโตคอลการสื่อสารหลายแบบบน PROFIBUS บัสและในเครือข่าย PROFINET
สำหรับ PROFIBUS:
- PROFIBUS DP - การใช้งานโปรโตคอลนี้เกี่ยวข้องกับการสื่อสารกับอุปกรณ์ทาสระยะไกล ในกรณีของ PROFINET โปรโตคอลนี้จะสอดคล้องกับโปรโตคอล PROFINET IO
- PROFIBUS PA โดยพื้นฐานแล้วเหมือนกับ PROFIBUS DP ซึ่งใช้สำหรับการถ่ายโอนข้อมูลและแหล่งจ่ายไฟในเวอร์ชันป้องกันการระเบิดเท่านั้น (คล้ายกับ PROFIBUS DP ที่มีคุณสมบัติทางกายภาพที่แตกต่างกัน) สำหรับ PROFINET ยังไม่มีโปรโตคอลป้องกันการระเบิดที่คล้ายกับ PROFIBUS
- PROFIBUS FMS - ออกแบบมาเพื่อการแลกเปลี่ยนข้อมูลจากผู้ผลิตรายอื่นที่ไม่สามารถใช้ PROFIBUS DP อะนาล็อก PROFIBUS FMS ในเครือข่าย PROFINET คือโปรโตคอล PROFINET CBA
สำหรับโปรฟิเน็ต:
- โปรฟิเน็ต IO;
- โปรฟิเน็ต CBA
โปรโตคอล PROFINET IO แบ่งออกเป็นหลายคลาส:
- PROFINET NRT (non-real-time) ใช้ในแอปพลิเคชันที่เวลาไม่ใช่ปัจจัยสำคัญมากนัก โดยใช้โปรโตคอลการถ่ายโอนข้อมูลอีเทอร์เน็ต TCP/IPรวมถึง UDP/IP ด้วย
- PROFINET RT (เรียลไทม์) - ที่นี่การแลกเปลี่ยนข้อมูล I/O ดำเนินการโดยใช้เฟรมอีเธอร์เน็ต แต่ข้อมูลการวินิจฉัยและการสื่อสารยังคงถ่ายโอนผ่าน UDP/IP
- PROFINET IRT (Isochronous Real Time) - โปรโตคอลนี้ได้รับการพัฒนาโดยเฉพาะสำหรับแอปพลิเคชันควบคุมการเคลื่อนไหว และรวมถึงขั้นตอนการถ่ายโอนข้อมูลแบบ Isochronous
สำหรับการนำ PROFINET IRT hard real-time protocol ไปใช้นั้น สำหรับการสื่อสารกับอุปกรณ์ระยะไกลนั้น จะแยกช่องทางการแลกเปลี่ยนออกเป็นสองช่องทาง: แบบไอโซโครนัสและแบบอะซิงโครนัส ช่องสัญญาณแบบไอโซโครนัสที่มีความยาวรอบการแลกเปลี่ยนคงที่ใช้การซิงโครไนซ์สัญญาณนาฬิกาและส่งข้อมูลตามเวลาสำคัญ ส่วนโทรเลขระดับที่สองใช้สำหรับการส่ง ระยะเวลาการส่งข้อมูลในช่องสัญญาณ isochronous ไม่เกิน 1 มิลลิวินาที
ช่องสัญญาณแบบอะซิงโครนัสส่งข้อมูลที่เรียกว่าข้อมูลแบบเรียลไทม์ ซึ่งระบุที่อยู่ผ่านที่อยู่ MAC นอกจากนี้ ยังมีการส่งข้อมูลการวินิจฉัยและข้อมูลเสริมต่างๆ ผ่านช่องสัญญาณนี้ด้วย TCP/IPแน่นอนว่า ข้อมูลแบบเรียลไทม์ หรือโดยเฉพาะอย่างยิ่งข้อมูลอื่นๆ ไม่สามารถขัดจังหวะวงจรเวลาคงที่ได้
ชุดฟังก์ชัน PROFINET IO เพิ่มเติมไม่จำเป็นสำหรับระบบอัตโนมัติทางอุตสาหกรรมทุกระบบ ดังนั้นโปรโตคอลนี้จึงได้รับการปรับขนาดสำหรับโครงการเฉพาะ โดยคำนึงถึงระดับการปฏิบัติตามข้อกำหนดหรือระดับความสอดคล้อง: CC-A, CC-B, CC-CC คลาสการปฏิบัติตามข้อกำหนดทำให้คุณสามารถเลือกอุปกรณ์ภาคสนามและส่วนประกอบแกนหลักที่มีฟังก์ชันการทำงานขั้นต่ำที่จำเป็นได้
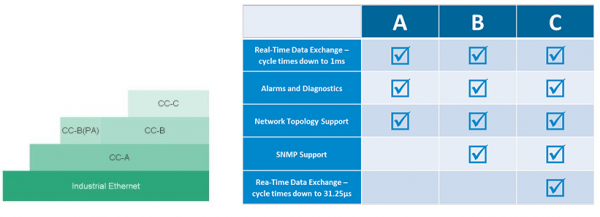
ที่มา:
โปรโตคอลการแลกเปลี่ยนที่สองในเครือข่าย PROFINET - PROFINET CBA - ใช้เพื่อจัดระเบียบการสื่อสารทางอุตสาหกรรมระหว่างอุปกรณ์จากผู้ผลิตหลายราย หน่วยการผลิตหลักในระบบ IAS คือเอนทิตีบางอย่างที่เรียกว่าส่วนประกอบ ส่วนประกอบนี้มักจะเป็นกลุ่มของชิ้นส่วนเครื่องกล ไฟฟ้า และอิเล็กทรอนิกส์ของอุปกรณ์หรือการติดตั้ง รวมถึงซอฟต์แวร์แอปพลิเคชันที่เกี่ยวข้อง สำหรับแต่ละส่วนประกอบ จะมีการเลือกโมดูลซอฟต์แวร์ซึ่งมีคำอธิบายที่สมบูรณ์ของอินเทอร์เฟซของส่วนประกอบนี้ตามข้อกำหนดของมาตรฐาน PROFINET หลังจากนั้นโมดูลซอฟต์แวร์เหล่านี้จะถูกใช้เพื่อแลกเปลี่ยนข้อมูลกับอุปกรณ์
โปรโตคอล B&R อีเธอร์เน็ต POWERLINK
โปรโตคอล Powerlink ได้รับการพัฒนาโดยบริษัท B&R ของออสเตรียในช่วงต้นทศวรรษ 2000 นี่เป็นการนำโปรโตคอลแบบเรียลไทม์ไปใช้นอกเหนือจากมาตรฐานอีเทอร์เน็ต ข้อกำหนดโปรโตคอลมีให้และเผยแพร่อย่างอิสระ
เทคโนโลยี Powerlink ใช้สิ่งที่เรียกว่ากลไกการสำรวจแบบผสม เมื่อการโต้ตอบทั้งหมดระหว่างอุปกรณ์ถูกแบ่งออกเป็นหลายขั้นตอน ข้อมูลที่สำคัญโดยเฉพาะจะถูกส่งในขั้นตอนการแลกเปลี่ยนแบบไอโซโครนัสซึ่งมีการกำหนดค่าเวลาตอบสนองที่ต้องการ ข้อมูลที่เหลือจะถูกส่งในเฟสอะซิงโครนัสทุกครั้งที่เป็นไปได้
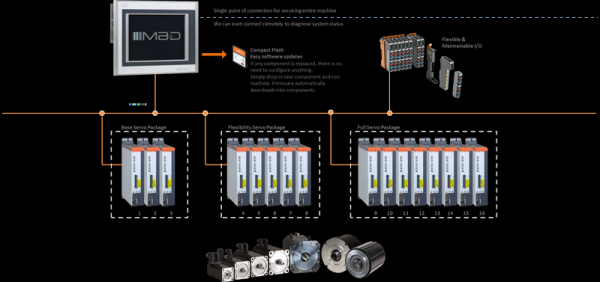
ตัวควบคุม B&R พร้อมชุดโมดูล I/O ที่มา: br-automation.com
เดิมทีโปรโตคอลนี้ถูกนำมาใช้บนเลเยอร์ฟิสิคัล 100Base-TX แต่ต่อมาก็มีการพัฒนาการใช้งานแบบกิกะบิต
โปรโตคอล Powerlink ใช้กลไกการกำหนดเวลาการสื่อสาร เครื่องหมายหรือข้อความควบคุมบางอย่างจะถูกส่งไปยังเครือข่าย โดยช่วยในการพิจารณาว่าอุปกรณ์ใดที่ได้รับอนุญาตให้แลกเปลี่ยนข้อมูลในปัจจุบัน มีอุปกรณ์เพียงเครื่องเดียวเท่านั้นที่สามารถเข้าถึงการแลกเปลี่ยนได้ในแต่ละครั้ง
การแสดงแผนผังของเครือข่าย Ethernet POWERLINK ที่มีหลายโหนด
ในเฟสไอโซโครนัส ตัวควบคุมการโพลจะส่งคำขอตามลำดับไปยังแต่ละโหนดที่ต้องการรับข้อมูลสำคัญ
เฟสไอโซโครนัสจะดำเนินการตามที่กล่าวไว้แล้ว โดยมีรอบเวลาที่สามารถปรับได้ ในขั้นตอนการแลกเปลี่ยนแบบอะซิงโครนัส จะใช้สแต็กโปรโตคอล IP ตัวควบคุมจะร้องขอข้อมูลที่ไม่สำคัญจากโหนดทั้งหมด ซึ่งจะส่งการตอบสนองเมื่อเข้าถึงเพื่อส่งไปยังเครือข่าย อัตราส่วนเวลาระหว่างเฟสไอโซโครนัสและเฟสอะซิงโครนัสสามารถปรับได้ด้วยตนเอง
โปรโตคอล Ethernet/IP ของ Rockwell Automation
โปรโตคอล EtherNet/IP ได้รับการพัฒนาโดยมีส่วนร่วมอย่างแข็งขันของบริษัท Rockwell Automation จากประเทศสหรัฐอเมริกาในปี 2000 โปรโตคอลนี้ใช้สแต็ก IP ของ TCP และ UDP และขยายการใช้งานเพื่อใช้ในระบบอัตโนมัติทางอุตสาหกรรม ส่วนที่สองของชื่อนั้น ตรงกันข้ามกับความเข้าใจผิดทั่วไป ไม่ได้หมายถึง Internet Protocol แต่หมายถึง Industrial Protocol UDP IP ใช้สแต็กการสื่อสาร CIP (Common Interface Protocol) ซึ่งใช้ในเครือข่าย ControlNet/DeviceNet ด้วย และถูกนำไปใช้งานบนพื้นฐานของ UDP TCP/IP.
ข้อกำหนด EtherNet/IP เปิดเผยต่อสาธารณะและเผยแพร่โดยเสรี โทโพโลยีเครือข่ายอีเทอร์เน็ต/IP สามารถกำหนดได้ตามใจชอบ และรวมถึงวงแหวน สตาร์ ทรี หรือบัส
นอกเหนือจากฟังก์ชันมาตรฐานของโปรโตคอล HTTP, FTP, SMTP, EtherNet/IP แล้ว ยังใช้การถ่ายโอนข้อมูลที่มีความสำคัญด้านเวลาระหว่างตัวควบคุมการโพลและอุปกรณ์ I/O การส่งข้อมูลที่ไม่มีความสำคัญด้านเวลานั้นจัดทำโดยแพ็กเก็ต TCP และการส่งข้อมูลการควบคุมแบบวนแบบตามเวลาที่สำคัญจะดำเนินการผ่านโปรโตคอล UDP
ในการซิงโครไนซ์เวลาในระบบแบบกระจาย EtherNet/IP จะใช้โปรโตคอล CIPsync ซึ่งเป็นส่วนขยายของโปรโตคอลการสื่อสาร CIP
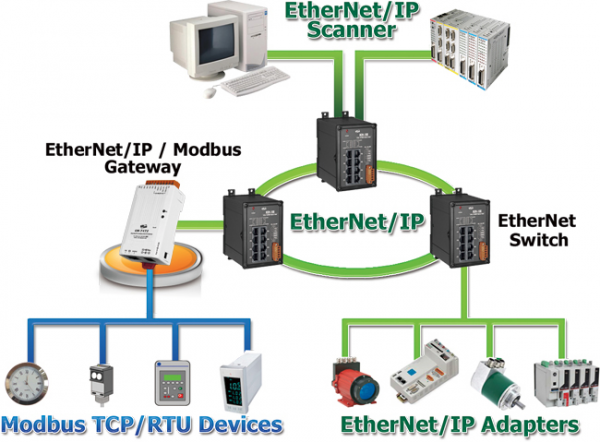
การแสดงแผนผังของเครือข่ายอีเทอร์เน็ต/IP ที่มีหลายโหนดและการเชื่อมต่อของอุปกรณ์ Modbus แหล่งที่มา:
เพื่อให้การตั้งค่าเครือข่าย EtherNet/IP ง่ายขึ้น อุปกรณ์อัตโนมัติมาตรฐานส่วนใหญ่จะมาพร้อมกับไฟล์การกำหนดค่าที่กำหนดไว้ล่วงหน้า
การใช้งานโปรโตคอล FBUS ที่ Fastwel
เราคิดมานานแล้วว่าจะรวม บริษัท Fastwel ของรัสเซียไว้ในรายการนี้พร้อมกับการใช้งานโปรโตคอลอุตสาหกรรม FBUS ในประเทศหรือไม่ แต่จากนั้นเราก็ตัดสินใจเขียนสองสามย่อหน้าเพื่อให้เข้าใจถึงความเป็นจริงของการทดแทนการนำเข้าได้ดีขึ้น
มีการใช้งานจริงของ FBUS สองแบบ หนึ่งในนั้นคือบัสที่โปรโตคอล FBUS ทำงานบนมาตรฐาน RS485 นอกจากนี้ยังมีการใช้งาน FBUS ในเครือข่ายอีเธอร์เน็ตอุตสาหกรรม
FBUS แทบจะเรียกได้ว่าไม่ใช่โปรโตคอลความเร็วสูงเลย เพราะเวลาตอบสนองขึ้นอยู่กับจำนวนโมดูล I/O บนบัสและพารามิเตอร์การแลกเปลี่ยนข้อมูล โดยทั่วไปจะอยู่ในช่วง 0,5 ถึง 10 มิลลิวินาที โหนดสเลฟ FBUS หนึ่งโหนดสามารถมีโมดูล I/O ได้เพียง 64 โมดูลเท่านั้น สำหรับฟิลด์บัส ความยาวสายเคเบิลต้องไม่เกิน 1 เมตร ดังนั้นระบบแบบกระจายจึงเป็นไปไม่ได้ จริงๆ แล้วก็เป็นไปได้ แต่เฉพาะเมื่อใช้เครือข่าย FBUS ในระดับอุตสาหกรรมเท่านั้น TCP/IPซึ่งหมายถึงเวลาในการตรวจสอบที่เพิ่มขึ้นหลายเท่าตัว สามารถใช้ตัวขยายสัญญาณบัสเพื่อเชื่อมต่อโมดูลต่างๆ ทำให้สามารถจัดวางในตู้ควบคุมอัตโนมัติได้อย่างสะดวก
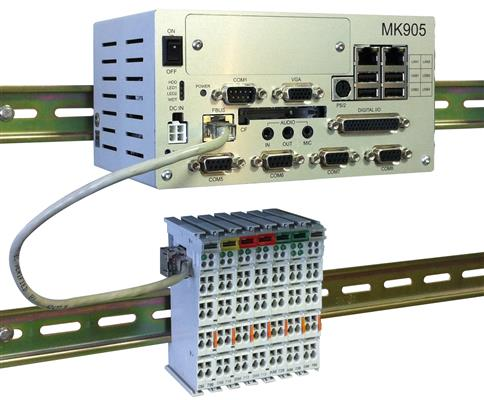
คอนโทรลเลอร์ Fastwel พร้อมโมดูล I/O ที่เชื่อมต่ออยู่ แหล่งที่มา:
รวมทั้งหมด: วิธีการใช้ทั้งหมดนี้ในทางปฏิบัติในระบบควบคุมกระบวนการอัตโนมัติ
โดยปกติแล้ว โปรโตคอลการถ่ายโอนข้อมูลทางอุตสาหกรรมสมัยใหม่ประเภทต่างๆ นั้นยิ่งใหญ่กว่าที่เราอธิบายไว้ในบทความนี้มาก บางส่วนเชื่อมโยงกับผู้ผลิตรายใดรายหนึ่ง บางส่วนเป็นสากล เมื่อพัฒนาระบบควบคุมกระบวนการอัตโนมัติ (APCS) วิศวกรจะเลือกโปรโตคอลที่เหมาะสมที่สุด โดยคำนึงถึงงานและข้อจำกัดเฉพาะ (ทางเทคนิคและงบประมาณ)
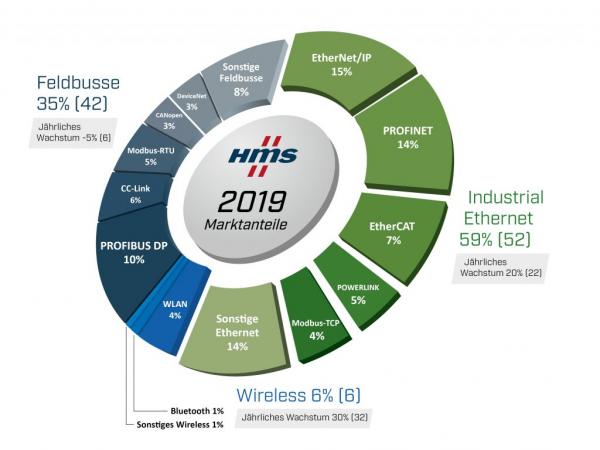
หากเราพูดถึงความแพร่หลายของโปรโตคอลการแลกเปลี่ยนใดๆ เราสามารถจัดทำแผนภาพของบริษัทได้ HMS Networks ABซึ่งแสดงให้เห็นส่วนแบ่งการตลาดของเทคโนโลยีการแลกเปลี่ยนต่างๆ ในเครือข่ายอุตสาหกรรม
ที่มา:
ดังที่เห็นในแผนภาพ PRONET และ PROFIBUS จาก Siemens ครองตำแหน่งผู้นำ
ที่น่าสนใจคือเมื่อ 6 ปีที่แล้ว .
ตารางด้านล่างมีข้อมูลสรุปเกี่ยวกับโปรโตคอลการแลกเปลี่ยนที่อธิบายไว้ พารามิเตอร์บางตัว เช่น ประสิทธิภาพ จะแสดงในรูปแบบนามธรรม: สูง / ต่ำ สามารถดูการเทียบเท่าเชิงตัวเลขได้ในบทความการวิเคราะห์ประสิทธิภาพ
| อีเธอร์แคท | พาวเวอร์ลิงค์ | กำไร | EtherNet / IP | ModbusTCP |
ชั้นทางกายภาพ | 100/1000 ฐาน-TX | 100/1000 ฐาน-TX | 100/1000 ฐาน-TX | 100/1000 ฐาน-TX | 100/1000 ฐาน-TX |
ระดับข้อมูล | ช่องสัญญาณ (เฟรมอีเธอร์เน็ต) | ช่องสัญญาณ (เฟรมอีเธอร์เน็ต) | ช่องสัญญาณ (เฟรมอีเธอร์เน็ต), เครือข่าย/การขนส่ง (TCP/IP) | เครือข่าย/การขนส่ง(TCP/IP) | เครือข่าย/การขนส่ง(TCP/IP) |
การสนับสนุนแบบเรียลไทม์ | มี | มี | มี | มี | ไม่ |
การปฏิบัติ | สูง | สูง | IRT – สูง RT – ปานกลาง | เฉลี่ย | ต่ำ |
ความยาวสายเคเบิลระหว่างโหนด | 100m | 100ม./2กม | 100m | 100m | 100m |
ขั้นตอนการโอน | ไม่ | แบบไอโซโครนัส + แบบอะซิงโครนัส | IRT - แบบ isochronous + แบบอะซิงโครนัส, RT - แบบอะซิงโครนัส | ไม่ | ไม่ |
จำนวนโหนด | 65535 | 240 | ข้อจำกัดของเครือข่าย TCP/IP | ข้อจำกัดของเครือข่าย TCP/IP | ข้อจำกัดของเครือข่าย TCP/IP |
ความละเอียดการชนกัน | โทโพโลยีแบบวงแหวน | การซิงโครไนซ์นาฬิกา, ขั้นตอนการส่งสัญญาณ | โทโพโลยีแบบวงแหวน ขั้นตอนการส่งข้อมูล | สวิตช์โทโพโลยีแบบดาว | สวิตช์โทโพโลยีแบบดาว |
แลกเปลี่ยนร้อน | ไม่ | มี | มี | มี | ขึ้นอยู่กับการนำไปปฏิบัติ |
ต้นทุนอุปกรณ์ | ต่ำ | ต่ำ | สูง | เฉลี่ย | ต่ำ |
พื้นที่การใช้งานของโปรโตคอลการแลกเปลี่ยนที่อธิบายไว้ ฟิลด์บัส และเครือข่ายอุตสาหกรรมมีความหลากหลายมาก จากอุตสาหกรรมเคมีและยานยนต์ไปจนถึงเทคโนโลยีการบินและอวกาศและการผลิตอิเล็กทรอนิกส์ โปรโตคอลการแลกเปลี่ยนความเร็วสูงเป็นที่ต้องการในระบบกำหนดตำแหน่งแบบเรียลไทม์สำหรับอุปกรณ์ต่างๆ และในหุ่นยนต์
คุณทำงานกับโปรโตคอลใดและคุณนำไปใช้ที่ไหน? แบ่งปันประสบการณ์ของคุณในความคิดเห็น 🙂
ที่มา: will.com
