

แน่นอนว่าหลายท่านคงทราบหรือเคยเห็นมาก่อนว่าวัตถุอัตโนมัติขนาดใหญ่ถูกควบคุมอย่างไร เช่น โรงไฟฟ้านิวเคลียร์หรือโรงงานที่มีสายการผลิตจำนวนมาก การกระทำหลักมักเกิดขึ้นในห้องขนาดใหญ่ที่มีฉากกั้น หลอดไฟจำนวนมาก และรีโมทคอนโทรล ศูนย์ควบคุมนี้มักเรียกว่าห้องควบคุมหลัก - แผงควบคุมหลักสำหรับตรวจสอบโรงงานผลิต
คุณคงสงสัยว่าระบบทั้งหมดทำงานอย่างไรในแง่ของฮาร์ดแวร์และซอฟต์แวร์ ระบบเหล่านี้แตกต่างจากคอมพิวเตอร์ส่วนบุคคลทั่วไปอย่างไร ในบทความนี้ เราจะดูว่าข้อมูลต่างๆ เข้าถึงห้องควบคุมหลักได้อย่างไร วิธีส่งคำสั่งไปยังอุปกรณ์ และสิ่งที่จำเป็นโดยทั่วไปในการควบคุมสถานีคอมเพรสเซอร์ โรงงานผลิตโพรเพน สายการประกอบรถยนต์ หรือแม้แต่ โรงงานสูบน้ำเสีย
ระดับต่ำสุดหรือฟิลด์บัสคือจุดเริ่มต้นทั้งหมด
ชุดคำนี้ไม่ชัดเจนสำหรับผู้ที่ไม่ได้ฝึกหัด จะใช้เมื่อจำเป็นต้องอธิบายวิธีการสื่อสารระหว่างไมโครคอนโทรลเลอร์และอุปกรณ์รอง เช่น โมดูล I/O หรืออุปกรณ์วัด โดยทั่วไปช่องทางการสื่อสารนี้เรียกว่า "ฟิลด์บัส" เนื่องจากมีหน้าที่ในการส่งข้อมูลที่มาจาก "ฟิลด์" ไปยังตัวควบคุม
“ภาคสนาม” เป็นคำศัพท์ทางวิชาชีพที่ลึกซึ้งซึ่งหมายถึงข้อเท็จจริงที่ว่าอุปกรณ์บางอย่าง (เช่น เซ็นเซอร์หรือแอคทูเอเตอร์) ที่ผู้ควบคุมโต้ตอบด้วยนั้นตั้งอยู่ที่ไหนสักแห่งที่ไกลออกไป บนถนน ในทุ่งนา ภายใต้ความมืดมิดยามค่ำคืน . และไม่สำคัญว่าเซ็นเซอร์จะอยู่ห่างจากตัวควบคุมครึ่งเมตรและวัดอุณหภูมิในตู้อัตโนมัติ แต่ก็ยังถือว่าอยู่ "ในสนาม" โดยส่วนใหญ่ สัญญาณจากเซ็นเซอร์ที่มาถึงโมดูล I/O ยังคงมีระยะการเดินทางตั้งแต่สิบถึงร้อยเมตร (และบางครั้งอาจมากกว่านั้น) เพื่อรวบรวมข้อมูลจากไซต์หรืออุปกรณ์ระยะไกล ที่จริงแล้วนั่นคือสาเหตุที่ Exchange Bus ซึ่งคอนโทรลเลอร์ได้รับค่าจากเซ็นเซอร์เดียวกันนี้มักเรียกว่าฟิลด์บัสหรือโดยทั่วไปน้อยกว่าคือบัสระดับล่างหรือบัสอุตสาหกรรม
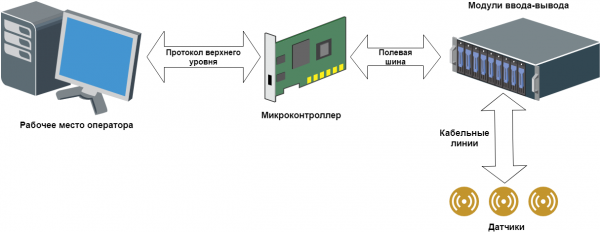
รูปแบบทั่วไปของระบบอัตโนมัติของโรงงานอุตสาหกรรม
ดังนั้น สัญญาณไฟฟ้าจากเซ็นเซอร์จะเคลื่อนที่เป็นระยะทางหนึ่งตามสายเคเบิล (โดยปกติจะไปตามสายเคเบิลทองแดงธรรมดาที่มีแกนจำนวนหนึ่ง) ซึ่งมีเซ็นเซอร์หลายตัวเชื่อมต่ออยู่ จากนั้นสัญญาณจะเข้าสู่โมดูลการประมวลผล (โมดูลอินพุต/เอาต์พุต) ซึ่งจะถูกแปลงเป็นภาษาดิจิทัลที่คอนโทรลเลอร์สามารถเข้าใจได้ ถัดไป สัญญาณนี้ผ่านฟิลด์บัสจะส่งตรงไปยังคอนโทรลเลอร์ ซึ่งในที่สุดสัญญาณก็จะถูกประมวลผล จากสัญญาณดังกล่าว ตรรกะการทำงานของไมโครคอนโทรลเลอร์จะถูกสร้างขึ้นเอง
ระดับบนสุด: จากพวงมาลัยไปจนถึงเวิร์กสเตชันทั้งหมด
ระดับบนเรียกว่าทุกสิ่งที่สามารถสัมผัสได้โดยผู้ปฏิบัติงานธรรมดาที่ควบคุมกระบวนการทางเทคโนโลยี ในกรณีที่ง่ายที่สุด ระดับบนสุดคือชุดไฟและปุ่มต่างๆ หลอดไฟจะส่งสัญญาณให้ผู้ปฏิบัติงานทราบเกี่ยวกับเหตุการณ์บางอย่างที่เกิดขึ้นในระบบ ปุ่มต่างๆ ใช้เพื่อออกคำสั่งไปยังตัวควบคุม ระบบนี้มักเรียกว่า “พวงมาลัย” หรือ “ต้นคริสต์มาส” เพราะมีลักษณะคล้ายกันมาก (ดังที่คุณเห็นจากรูปภาพตอนต้นบทความ)
หากผู้ปฏิบัติงานโชคดีกว่านั้นในฐานะระดับบนสุดเขาจะได้รับแผงควบคุมซึ่งเป็นคอมพิวเตอร์จอแบนชนิดหนึ่งที่รับข้อมูลสำหรับการแสดงผลจากคอนโทรลเลอร์และแสดงบนหน้าจอไม่ทางใดก็ทางหนึ่ง โดยปกติแล้วแผงดังกล่าวจะติดตั้งอยู่บนตู้ระบบอัตโนมัติ ดังนั้นคุณมักจะต้องโต้ตอบกับแผงดังกล่าวขณะยืน ซึ่งทำให้เกิดความไม่สะดวก อีกทั้งคุณภาพและขนาดของภาพบนแผงรูปแบบขนาดเล็กทำให้เป็นที่ต้องการอย่างมาก

และในที่สุดแรงดึงดูดของความมีน้ำใจที่ไม่เคยมีมาก่อน - เวิร์กสเตชัน (หรือซ้ำกันหลายรายการ) ซึ่งเป็นคอมพิวเตอร์ส่วนบุคคลธรรมดา
อุปกรณ์ระดับบนต้องมีปฏิสัมพันธ์กับไมโครคอนโทรลเลอร์ในทางใดทางหนึ่ง (ไม่เช่นนั้นทำไมจึงจำเป็น) สำหรับการโต้ตอบดังกล่าว จะใช้โปรโตคอลระดับบนและสื่อการส่งผ่านบางอย่าง เช่น อีเทอร์เน็ตหรือ UART ในกรณีของ "ต้นคริสต์มาส" แน่นอนว่าความซับซ้อนนั้นไม่จำเป็นหลอดไฟถูกส่องสว่างโดยใช้เส้นทางกายภาพธรรมดาไม่มีอินเทอร์เฟซหรือโปรโตคอลที่ซับซ้อน
โดยทั่วไป ระดับบนนี้มีความน่าสนใจน้อยกว่าฟิลด์บัส เนื่องจากระดับบนนี้อาจไม่มีอยู่เลย (ไม่มีอะไรให้ผู้ปฏิบัติงานดูจากซีรีส์นี้ ผู้ควบคุมจะคิดเองว่าต้องทำอะไรและอย่างไร ).
โปรโตคอลการถ่ายโอนข้อมูล "โบราณ": Modbus และ HART
ไม่กี่คนที่รู้ แต่ในวันที่เจ็ดของการสร้างโลก พระเจ้าไม่ได้หยุดพัก แต่ทรงสร้าง Modbus นอกเหนือจากโปรโตคอล HART แล้ว Modbus อาจเป็นโปรโตคอลการถ่ายโอนข้อมูลทางอุตสาหกรรมที่เก่าแก่ที่สุด ซึ่งปรากฏในปี 1979
ในขั้นต้น มีการใช้พอร์ตอนุกรมเป็นสื่อกลางในการส่งข้อมูล จากนั้นจึงนำ Modbus มาประยุกต์ใช้เพิ่มเติม TCP/IPนี่คือโปรโตคอลแบบซิงโครนัสระหว่างมาสเตอร์และสเลฟ โดยใช้หลักการร้องขอและการตอบสนอง โปรโตคอลนี้ค่อนข้างใหญ่และช้า อัตราการแลกเปลี่ยนข้อมูลขึ้นอยู่กับคุณลักษณะของตัวรับและตัวส่ง แต่โดยทั่วไปแล้วจะใช้เวลาหลายร้อยมิลลิวินาที โดยเฉพาะอย่างยิ่งเมื่อใช้งานผ่านอินเทอร์เฟซแบบอนุกรม
นอกจากนี้ การลงทะเบียนการถ่ายโอนข้อมูล Modbus เป็นแบบ 16 บิต ซึ่งกำหนดข้อจำกัดในการถ่ายโอนประเภทจริงและประเภทคู่ทันที จะถูกส่งเป็นบางส่วนหรือสูญเสียความแม่นยำ แม้ว่า Modbus ยังคงใช้กันอย่างแพร่หลายในกรณีที่ไม่จำเป็นต้องใช้ความเร็วในการสื่อสารสูงและการสูญเสียข้อมูลที่ส่งก็ไม่สำคัญ ผู้ผลิตอุปกรณ์ต่างๆ หลายรายต้องการขยายโปรโตคอล Modbus ด้วยวิธีพิเศษเฉพาะของตนเอง โดยเพิ่มฟังก์ชันที่ไม่ได้มาตรฐาน ดังนั้นโปรโตคอลนี้จึงมีการกลายพันธุ์และการเบี่ยงเบนไปจากบรรทัดฐานมากมาย แต่ยังคงประสบความสำเร็จในโลกสมัยใหม่
โปรโตคอล HART มีมาตั้งแต่ช่วงทศวรรษที่ 4 เช่นกัน โดยเป็นโปรโตคอลการสื่อสารทางอุตสาหกรรมบนเส้นลูปกระแสสองสายที่เชื่อมต่อเซ็นเซอร์ 20-XNUMX mA และอุปกรณ์อื่นๆ ที่ใช้งาน HART ได้โดยตรง
ในการสลับสาย HART จะใช้อุปกรณ์พิเศษที่เรียกว่าโมเด็ม HART นอกจากนี้ยังมีตัวแปลงที่ให้โปรโตคอล Modbus แก่ผู้ใช้ที่เอาต์พุต
HART อาจมีความโดดเด่นในความจริงที่ว่านอกเหนือจากสัญญาณอะนาล็อกของเซ็นเซอร์ 4-20 mA แล้วสัญญาณดิจิทัลของโปรโตคอลเองก็ถูกส่งในวงจรด้วยซึ่งช่วยให้คุณสามารถเชื่อมต่อชิ้นส่วนดิจิทัลและอะนาล็อกในสายเคเบิลเส้นเดียว โมเด็ม HART สมัยใหม่สามารถเชื่อมต่อกับพอร์ต USB ของคอนโทรลเลอร์ เชื่อมต่อผ่าน Bluetooth หรือเชื่อมต่อด้วยวิธีเก่าผ่านพอร์ตอนุกรม เมื่อหลายสิบปีก่อนมาตรฐานไร้สาย WirelessHART ที่ทำงานในช่วง ISM ปรากฏขึ้นโดยการเปรียบเทียบกับ Wi-Fi
โปรโตคอลรุ่นที่สองหรือไม่ใช่บัสอุตสาหกรรม ISA, PCI(e) และ VME
โปรโตคอล Modbus และ HART ถูกแทนที่ด้วยบัสที่ไม่ใช่อุตสาหกรรม เช่น ISA (MicroPC, PC/104) หรือ PCI/PCIe (CompactPCI, CompactPCI Serial, StacPC) รวมถึง VME
ยุคของคอมพิวเตอร์มาถึงแล้วซึ่งมีบัสข้อมูลสากลซึ่งสามารถเชื่อมต่อบอร์ด (โมดูล) ต่าง ๆ เพื่อประมวลผลสัญญาณรวมบางอย่างได้ ตามกฎแล้วในกรณีนี้โมดูลโปรเซสเซอร์ (คอมพิวเตอร์) จะถูกแทรกเข้าไปในเฟรมที่เรียกว่าซึ่งช่วยให้มั่นใจได้ถึงการโต้ตอบผ่านบัสกับอุปกรณ์อื่น ๆ เฟรมหรือตามที่ผู้เชี่ยวชาญด้านระบบอัตโนมัติชอบเรียกมันว่า "ลัง" ได้รับการเสริมด้วยบอร์ดอินพุต-เอาท์พุตที่จำเป็น: อะนาล็อก แยกส่วน อินเทอร์เฟซ ฯลฯ หรือทั้งหมดนี้รวมเข้าด้วยกันในรูปแบบของแซนวิชโดยไม่มี เฟรม - กระดานหนึ่งอันอยู่ด้านบนของอีกอัน หลังจากนั้นความหลากหลายบนบัส (ISA, PCI ฯลฯ ) จะแลกเปลี่ยนข้อมูลกับโมดูลโปรเซสเซอร์ซึ่งรับข้อมูลจากเซ็นเซอร์และใช้ตรรกะบางอย่าง
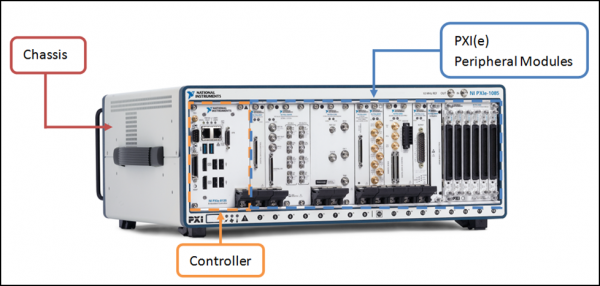
คอนโทรลเลอร์และโมดูล I/O ในเฟรม PXI บนบัส PCI แหล่งที่มา:
ทุกอย่างจะเรียบร้อยดีด้วยบัส ISA, PCI(e) และ VME โดยเฉพาะในช่วงเวลาดังกล่าว ความเร็วในการแลกเปลี่ยนไม่ทำให้ผิดหวัง และส่วนประกอบของระบบอยู่ในเฟรมเดียว กะทัดรัด และสะดวกสบาย อาจไม่สามารถถอดเปลี่ยนได้ทันที การ์ด I/O แต่ฉันยังไม่ต้องการจริงๆ
แต่ก็มีข้อเสียอยู่หลายประการ การสร้างระบบกระจายในรูปแบบนี้ค่อนข้างยาก เพราะบัสสื่อสารอยู่ภายในเครื่องเดียวกัน และจำเป็นต้องคิดค้นวิธีการแลกเปลี่ยนข้อมูลกับโหนดลูกข่ายหรือโหนดร่วมอื่นๆ เช่น Modbus เป็นต้น TCP/IP หรือโปรโตคอลอื่นๆ—กล่าวโดยสรุปคือ มันไม่สะดวกนัก และยังมีอีกเรื่องที่ไม่ค่อยดีนัก: โดยปกติแล้วบอร์ด I/O มักคาดหวังสัญญาณแบบรวมที่อินพุต และขาดการแยกทางไฟฟ้าจากอุปกรณ์ภาคสนาม ดังนั้นคุณจึงต้องใช้โมดูลแปลงและวงจรตัวกลางที่แตกต่างกันมากมาย ซึ่งทำให้การออกแบบฮาร์ดแวร์ซับซ้อนขึ้นอย่างมาก
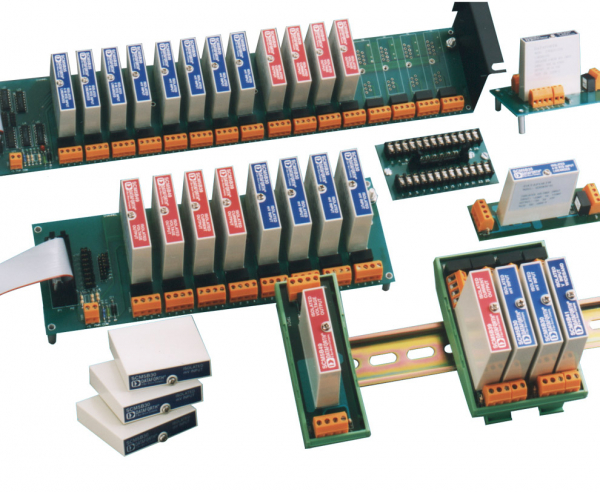
โมดูลการแปลงสัญญาณระดับกลางพร้อมการแยกสัญญาณไฟฟ้า แหล่งที่มา:
“แล้วโปรโตคอลบัสอุตสาหกรรมล่ะ?” - คุณถาม. ไม่มีอะไร. ไม่มีอยู่ในการดำเนินการนี้ ผ่านสายเคเบิล สัญญาณจะเดินทางจากเซ็นเซอร์ไปยังตัวแปลงสัญญาณ ตัวแปลงจะจ่ายแรงดันไฟฟ้าให้กับบอร์ด I/O แบบแยกหรือแบบอะนาล็อก และข้อมูลจากบอร์ดจะถูกอ่านผ่านพอร์ต I/O โดยใช้ระบบปฏิบัติการ และไม่มีโปรโตคอลพิเศษ
บัสและโปรโตคอลอุตสาหกรรมสมัยใหม่ทำงานอย่างไร
อะไรตอนนี้? จนถึงปัจจุบัน อุดมการณ์ดั้งเดิมของการสร้างระบบอัตโนมัติมีการเปลี่ยนแปลงเล็กน้อย มีหลายปัจจัยที่มีบทบาท เริ่มต้นด้วยความจริงที่ว่าระบบอัตโนมัติควรจะสะดวก และจบลงด้วยแนวโน้มไปสู่ระบบอัตโนมัติแบบกระจายที่มีโหนดอยู่ห่างจากกัน
บางทีเราอาจพูดได้ว่าในปัจจุบันมีแนวคิดหลักสองประการสำหรับระบบอัตโนมัติในอาคาร: ระบบอัตโนมัติแบบโลคัลไลซ์และแบบกระจาย
ในกรณีของระบบโลคัลไลซ์ ซึ่งการรวบรวมและการควบคุมข้อมูลถูกรวมศูนย์ไว้ที่ตำแหน่งเฉพาะแห่งเดียว แนวคิดของชุดโมดูลอินพุต/เอาท์พุตบางชุดที่เชื่อมต่อถึงกันด้วยบัสด่วนทั่วไป รวมถึงตัวควบคุมที่มีโปรโตคอลการแลกเปลี่ยนของตัวเองเป็นที่ต้องการ ในกรณีนี้ ตามกฎแล้ว โมดูล I/O จะมีทั้งตัวแปลงสัญญาณและการแยกกระแสไฟฟ้า (แม้ว่าแน่นอนว่าไม่เสมอไป) นั่นคือเพียงพอแล้วสำหรับผู้ใช้ปลายทางที่จะเข้าใจว่าเซ็นเซอร์และกลไกประเภทใดที่จะมีอยู่ในระบบอัตโนมัติ นับจำนวนโมดูลอินพุต/เอาท์พุตที่จำเป็นสำหรับสัญญาณประเภทต่างๆ และเชื่อมต่อเป็นบรรทัดเดียวร่วมกับตัวควบคุม . ในกรณีนี้ ตามกฎแล้ว ผู้ผลิตแต่ละรายจะใช้โปรโตคอลการแลกเปลี่ยนที่ชื่นชอบระหว่างโมดูล I/O และคอนโทรลเลอร์ และอาจมีตัวเลือกมากมายที่นี่
ในกรณีของระบบแบบกระจาย ทุกสิ่งที่กล่าวไว้เกี่ยวกับระบบที่แปลเป็นภาษาท้องถิ่นนั้นเป็นความจริง นอกจากนี้ สิ่งสำคัญคือแต่ละส่วนประกอบ เช่น ชุดโมดูลอินพุต-เอาท์พุต รวมถึงอุปกรณ์สำหรับรวบรวมและส่งข้อมูล - ไม่ใช่ ไมโครคอนโทรลเลอร์ที่ชาญฉลาดมากซึ่งตั้งอยู่ที่ไหนสักแห่งในบูธในสนาม ถัดจากวาล์วที่ปิดน้ำมัน - สามารถโต้ตอบกับโหนดเดียวกันและกับตัวควบคุมหลักในระยะไกลด้วยอัตราแลกเปลี่ยนที่มีประสิทธิภาพ
นักพัฒนาจะเลือกโปรโตคอลสำหรับโครงการของตนได้อย่างไร? โปรโตคอลการแลกเปลี่ยนสมัยใหม่ทั้งหมดให้ประสิทธิภาพที่ค่อนข้างสูง ดังนั้นการเลือกผู้ผลิตรายหนึ่งหรือรายอื่นจึงมักไม่ได้ถูกกำหนดโดยอัตราแลกเปลี่ยนบนบัสอุตสาหกรรมนี้ การใช้งานโปรโตคอลนั้นไม่สำคัญนักเนื่องจากจากมุมมองของผู้พัฒนาระบบจะยังคงเป็นกล่องดำที่ให้โครงสร้างการแลกเปลี่ยนภายในที่แน่นอนและไม่ได้ออกแบบมาเพื่อการแทรกแซงจากภายนอก ส่วนใหญ่มักจะให้ความสนใจกับลักษณะการใช้งานจริง: ประสิทธิภาพของคอมพิวเตอร์, ความง่ายในการนำแนวคิดของผู้ผลิตไปใช้กับงานที่ทำอยู่, ความพร้อมใช้งานของโมดูล I/O ประเภทที่ต้องการ, ความสามารถในการเปลี่ยนโมดูลแบบ hot-swappable โดยไม่แตกหัก รถบัส ฯลฯ
ซัพพลายเออร์อุปกรณ์ยอดนิยมนำเสนอการใช้งานโปรโตคอลทางอุตสาหกรรมของตนเอง: ตัวอย่างเช่น บริษัทชื่อดัง Siemens กำลังพัฒนาชุดโปรโตคอล Profinet และ Profibus, B&R กำลังพัฒนาโปรโตคอล Powerlink, Rockwell Automation กำลังพัฒนาโปรโตคอล EtherNet/IP โซลูชันในประเทศในรายการตัวอย่างนี้: เวอร์ชันของโปรโตคอล FBUS จากบริษัท Fastwel ของรัสเซีย
นอกจากนี้ยังมีโซลูชันสากลอื่นๆ ที่ไม่ได้เชื่อมโยงกับผู้ผลิตรายใดรายหนึ่ง เช่น EtherCAT และ CAN เราจะวิเคราะห์โปรโตคอลเหล่านี้โดยละเอียดในบทความต่อจากนี้ และพิจารณาว่าโปรโตคอลใดที่เหมาะกับการใช้งานเฉพาะด้านมากกว่า: อุตสาหกรรมยานยนต์และอวกาศ การผลิตอุปกรณ์อิเล็กทรอนิกส์ ระบบกำหนดตำแหน่ง และหุ่นยนต์ ติดต่อกัน!
ที่มา: will.com
