

Представители космического агентства NASA в интервью изданию Spectrum IEEE раскрыли подробности о начинке автономного вертолёта-разведчика Ingenuity, вчера успешно приземлившегося на Марс в составе миссии Марс-2020. Особенностью проекта стало использование управляющей платы на базе SoC Snapdragon 801 от компании Qualcomm, который применяется при производстве смартфонов. Программная начинка Ingenuity основана на ядре Linux и открытом полётном ПО. Отмечается, что это первое использование Linux в аппаратах, отправленных на Марс. Более того, использование открытого ПО и доступных в широкой продаже аппаратных элементов даёт возможность заинтересованным энтузиастам собирать аналогичные дроны самостоятельно.
Ipinnu yii jẹ nitori otitọ pe ṣiṣakoso drone ti n fò nilo agbara iširo pupọ diẹ sii ju iṣakoso Mars Rover kan, eyiti o ni ipese pẹlu awọn eerun igi ti a ṣelọpọ ni pataki pẹlu aabo itọsi afikun. Fún àpẹrẹ, títọ́jú ọkọ̀ òfuurufú nílò ìṣàkóso yípo tí ń ṣiṣẹ́ ní 500 cycles fún ìṣẹ́jú àáyá kan àti ìtúpalẹ̀ àwòrán ní 30 férémù fún ìṣẹ́jú àáyá.
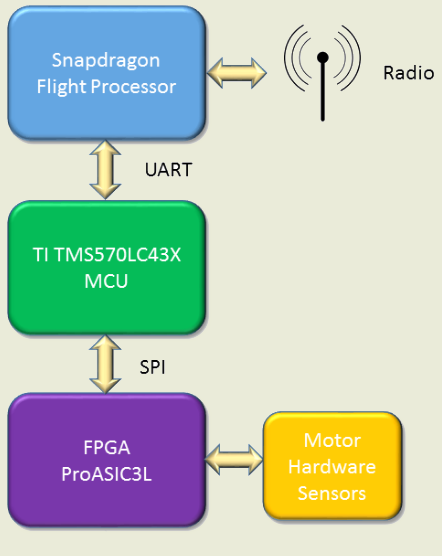
SoC Snapdragon 801 (четыре ядра, 2.26 GHz, 2 ГБ ОЗУ, 32 ГБ Flash) применяется для обеспечения работы базового системного окружения на основе Linux, на которое возложено выполнение высокоуровневых операций, таких как визуальная навигация на основе анализа изображений с камеры, управление данными, обработка команд, формирование телеметрии и поддержание канала беспроводной связи.
Awọn ero isise ti wa ni ti sopọ nipa lilo a UART ni wiwo si meji microcontrollers (MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB Ramu, 4 MB Flash, UART, SPI, GPIO), eyi ti o ṣe flight Iṣakoso iṣẹ. Awọn oluṣakoso microcontroller meji ni a lo fun apọju ni ọran ikuna ati gba alaye kanna lati awọn sensọ. Nikan kan microcontroller ti nṣiṣe lọwọ, ati awọn keji ti wa ni lo bi awọn kan apoju ati ni irú ti ikuna ni anfani lati ya lori Iṣakoso. MicroSemi ProASIC3L FPGA jẹ iduro fun gbigbe data lati awọn sensọ si microcontrollers ati fun ibaraenisepo pẹlu awọn oṣere ti o ṣakoso awọn abẹfẹlẹ, eyiti o tun yipada si microcontroller apoju ni iṣẹlẹ ti ikuna.
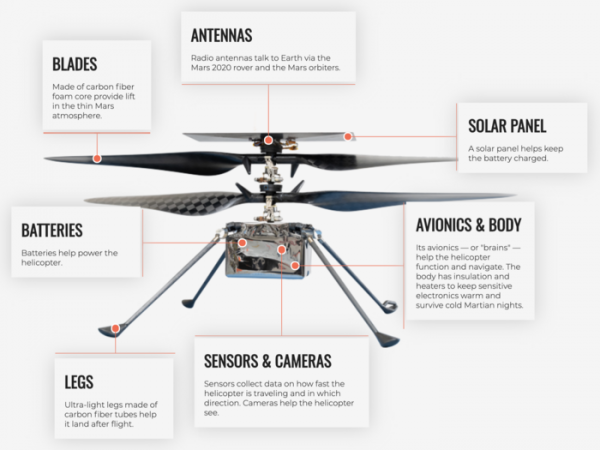
Lara ohun elo naa, drone nlo altimeter laser lati SparkFun Electronics, ile-iṣẹ kan ti o ṣe agbejade ohun elo orisun-ìmọ ati pe o jẹ ọkan ninu awọn ti o ṣẹda itumọ ti ohun elo orisun-ìmọ (OSHW). Awọn paati aṣoju miiran pẹlu gimbal stabilizer (IMU) ati awọn kamẹra fidio ti a lo ninu awọn fonutologbolori. Kamẹra VGA kan ni a lo lati tọpa ipo, itọsọna ati iyara nipasẹ lafiwe-fireemu-fireemu. Kamẹra awọ 13-megapiksẹli keji ti lo lati ya awọn aworan ti agbegbe naa.
Awọn paati sọfitiwia iṣakoso ọkọ ofurufu ni idagbasoke ni NASA JPL (Ilana Jet Propulsion Laboratory) fun awọn satẹlaiti Earth kekere ati ultra-kekere (cubesats) ati pe wọn ti n dagbasoke fun ọpọlọpọ ọdun gẹgẹbi apakan ti pẹpẹ ṣiṣi F Prime (F′), ti pin labẹ Apache 2.0 iwe-ašẹ.
F Prime n pese awọn irinṣẹ fun idagbasoke iyara ti awọn eto iṣakoso ọkọ ofurufu ati awọn ohun elo ti o ni ibatan. Sọfitiwia ọkọ ofurufu ti pin si awọn ẹya ara ẹni kọọkan pẹlu awọn atọkun siseto asọye daradara. Ni afikun si awọn paati amọja, ilana C ++ ni a funni pẹlu imuse ti iru awọn ẹya bii isinyi ifiranṣẹ ati multithreading, ati awọn irinṣẹ awoṣe ti o gba ọ laaye lati sopọ awọn paati ati ṣẹda koodu laifọwọyi.
orisun: opennet.ru
