

ነገ አገልጋያችንን ወደ stratosphere እንልካለን። በበረራ ወቅት የስትራቶስፌሪክ ፊኛ ኢንተርኔትን ያሰራጫል, ቪዲዮ እና የቴሌሜትሪ መረጃን ወደ መሬት ያሰራጫል. ስለ ፕሮጄክታችን "የጠፈር ዳታ ማእከል" ቴክኒካዊ ጎን እንደምንነጋገር ብዙ ጊዜ ጽፈናል (ከዚህ ቀደም ለስሙ ምላሽ ሰጥቷል)") ቃል ገብተናል - እናቀርባለን! በቆርጡ ስር ጥቂት የሃርድዌር እና ኮድ ቁርጥራጮች አሉ።
የድር አገልጋይ
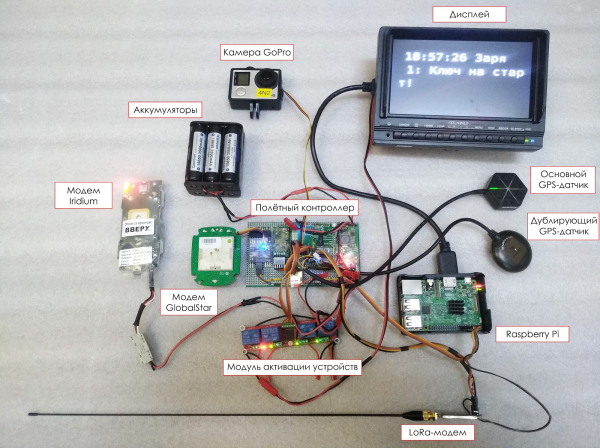
በቀደመው የ‹‹ሰርቨር ኢን ዘ ክላውስ›› ፕሮጄክት እንኳን ከሁለት ሰዎች ጋር ባለ ሙሉ ፊኛ ወደ ላይ ስንወጣ፣ ሙሉ አገልግሎት ያለው አገልጋይ ከባትሪ መገጣጠም ጋር መውሰድ፣ እንበል እንጂ ምክንያታዊ አልነበረም። እና አሁን እየተነጋገርን ያለነው ስለ አንድ ትንሽ የስትራቶስፌሪክ ፊኛ ነው ፣ እሱም 30 ኪ.ሜ መውጣት አለበት ፣ 1 አይደለም ። ስለዚህ ፣ ተመሳሳይ Raspberry Pi እንደ ድር አገልጋይ መረጥን። ይህ ማይክሮ ኮምፒውተር የኤችቲኤምኤል ገጽ ያመነጫል እና በተለየ ማሳያ ላይ ያሳየዋል።
የሳተላይት ግንኙነት
ከ Raspberry በተጨማሪ ከኢሪዲየም እና ግሎባልስታር ሳተላይት ኮሙኒኬሽን አውታሮች የሚመጡ ሞደሞች በመርከቧ ላይ ይበርራሉ። እንደምታስታውሱት, ለሀገር ውስጥ ጎኔትስ ኔትወርክ ሞደም ወደ ድርጅታቸው ለመጨመር አቅደን ነበር, ነገር ግን አስቀድመን ለመቀበል ጊዜ አላገኘንም, ስለዚህ በሚቀጥለው በረራ እንልካለን. በሳተላይት ሞደሞች፣ ዌብ አገልጋዩ መልእክቶቻችሁን ይቀበላል . እነዚህ መልዕክቶች ወደ Raspberry Pi ይተላለፋሉ፣ እሱም ወረፋ ያደርጋቸዋል እና በኤችቲኤምኤል ገጽ ላይ ያሳያቸዋል።
ጠቃሚ ነጥብ: በሩሲያ የጽሑፍ መልእክት ርዝመት ላይ ያለው ገደብ 58 ቁምፊዎች (ክፍተትን ጨምሮ) ነው. መልእክቱ ረዘም ያለ ከሆነ, በሚተላለፉበት ጊዜ ይቋረጣል. እንዲሁም ፣ ሁሉም ልዩ ቁምፊዎች ከጽሑፉ ይቆረጣሉ ፣ ለምሳሌ ፣ /+$%&;''""<>n እና የመሳሰሉት.
Raspberry Pi አንድ የ UART ወደብ ብቻ ስላለው የሳተላይት ሞደሞችን በመካከለኛው መገናኛ በኩል እናገናኛለን ይህም መረጃ ከሞደሞቹ ይሰበስባል እና ወደ Raspberry Pi ይልካል።
የሬዲዮ ሞደም
ዌብ አገልጋዩ ከእርስዎ የተቀበሉትን ሁሉንም መልዕክቶች በማሳያው ላይ ብቻ ሳይሆን በሎራ ሬዲዮ ሞደም ወደ ምድር ያስተላልፋል። ስለዚህ በይነመረብን ከስትራቶስፌር (ለጎግል ሉን ፕሮጀክት ግብር) የማሰራጨት ሀሳብን መሞከር እንፈልጋለን። እርግጥ ነው, የእኛ stratospheric ፊኛ ሙሉ በሙሉ የተሟላ የመገናኛ ተደጋጋሚ አይደለም, ነገር ግን አቅሙ የተረጋጋ ውሂብ ለማስተላለፍ በቂ ቢሆንም, መረጃ ትልቅ ኪሳራ ያለ, ከዚያም ልዩ ሥርዓቶች በእርግጠኝነት ቅድመ-ቦታ ከ ኢንተርኔት ማሰራጨት ለመቋቋም ይሆናል.
የቴሌሜትሪ
በተጨማሪም፣ በተመሳሳይ የኤችቲኤምኤል ገጽ ላይ የቴሌሜትሪ መረጃን ለማሳየት አቅደናል። Raspberry Pi ከተለየ የበረራ መቆጣጠሪያ ይወስዳቸዋል።
በሃርድዌር ሄርሜቲክ ሳጥን ውስጥም ሆነ ውጭ ሊቀመጡ የሚችሉ የተለያዩ ሴንሰሮችን በመጠየቅ መረጃውን በክምር ሰብስቦ በማበጠስ እና ለሚጠይቁት ምቹ በሆነ መልኩ ይሰጣል። በእኛ ሁኔታ, Raspberry Piን ይጠይቃል. ግፊትን፣ ከፍታን፣ የጂፒኤስ መጋጠሚያዎችን፣ አቀባዊ እና አግድም ፍጥነትን እና የሙቀት መጠንን እንመዘግባለን።
ከበረራ ተቆጣጣሪው የተገኘው መረጃ በረጅም መስመሮች ውስጥ ይተላለፋል ፣ ይህም የሚከተለውን ኮድ በመጠቀም ነው-
$str = 'N:647;T:10m55s;MP.Stage:0;MP.Alt:49;MP.VSpeed:0.0;MP.AvgVSpeed:0.0;Baro.Press:1007.06;Baro.Alt:50;Baro.Temp:35.93;GPS.Coord:N56d43m23s,E37d55m68s;GPS.Home:N56d43m23s,E37d55m68s;Dst:5;GPS.HSpeed:0;GPS.Course:357;GPS.Time:11h17m40s;GPS.Date:30.07.2018;DS.Temp:[fc]=33.56;Volt:5.19,0.00,0.00,0.00,0.00,0.00,0.00,0.00';
parse_str(strtr($str, [
':' => '=',
';' => '&'
]), $result);
print_r($result);ለእይታ ምቹ በሆነ ቅጽ ወደ ድርድር ይለውጡ፡-
Array
(
[N] => 647
[Т] => 10m55з
[MP_Stage] => 0
[MP_Alt] => 49
[MP_VSpeed) => 0.0
[MP_AvgVSpeed] => 0.0
[Baro Рrеss] => 1007.06
[Baro_Alt] => 50
[Baro_Temp] => 35.93
[GPS_Coord] => N56d43m23s,E37d55m68s
[GPS_Home) => N56d43m23s,E37d55m68s
[Dst] => 5
[GPS_HSpeed] => 0
[GPS_Course] => 357
[GPS_Time] => 11h17m40s
[GPS_Date] => 30.07.2018
[DS_Temp] => [fс] ЗЗ.56
[Volt] => 5.19, 0.00,0.00,0.00,0.00,0.00,0.00,0.00
)እንዲሁም የቴሌሜትሪ መረጃን ከመልእክቶችዎ ጋር ወደ ምድር እናስተላልፋለን። ይህንን ለማድረግ, በተነሳበት ቦታ ላይ የመቀበያ ጣቢያን እናሰማራለን.
ማሳያ እና ካሜራ
አገልጋዩ በትክክል መልእክቶቻችሁን በሳተላይት ኮሙኒኬሽን እየተቀበለ መሆኑን እና ወደ እስትራቶስፌር በረረ እና በቢሮአችን ውስጥ የቆመ አለመሆኑን ማረጋገጥ እንድትችሉ፣ ሁሉንም መልዕክቶች በቴሌሜትሪ በሚቀረጽ ማሳያ ላይ ለማሳየት ወስነናል። አንድ GoPro. ፕሮጀክቱን ለማዘጋጀት ትንሽ ጊዜ አልነበረውም (እንዴት ብዙ ሊሆን ይችላል?!)፣ ስለዚህ በ Aliexpress እና በሽያጭ ብረት አልተቸገርንም፣ ይልቁንም ዝግጁ የሆነ መሳሪያ ወሰድን። ለፍላጎታችን ከበቂ በላይ ነው። ማሳያውን በኤችዲኤምአይ በኩል ወደ Raspberry እናገናኘዋለን።
እንዲሁም ቪዲዮን ከጎፕሮ በተለየ የሬዲዮ ጣቢያ ለማሰራጨት አቅደናል ፣ ግን እንዴት እንደሚሰራ አሁንም አልታወቀም - ምናልባት ዝቅተኛ ደመናዎች የግንኙነት ወሰንን በእጅጉ ይቀንሳሉ ። ግን በማንኛውም ሁኔታ ፣ ያረፈውን የስትራቶስፌሪክ ፊኛ ካገኘን በኋላ ፣ ከካሜራ ቪዲዮ እንለጥፋለን እና “የቅድመ-ህዋ ዳታ ማእከል” ምን መልእክት እንደተቀበለ እና ምን ከፍታ ላይ እንደወጣ እራስዎ ማየት ይችላሉ - ቴሌሜትሪው ይታያል ። በተመሳሳዩ የኤችቲኤምኤል ገጽ ውስጥ ፣ በተጨማሪ ፣ የአድማስ ቁራጭ ይታያል።
የኃይል አቅርቦት
ሁሉም ከላይ የተገለጹት ውበት በ 3S4B ወረዳ መሰረት በተገጣጠሙ የሊቲየም ባትሪዎች ስብስብ - ሶስት ተከታታይ, አራት በትይዩ. አጠቃላይ አቅም በ 14 ቮ በቮልቴጅ 12 አህ ያህል ነው, እንደ ግምታችን, ይህ በቂ መሆን አለበት, ነገር ግን ከመጨረሻው ስብሰባ በኋላ, በእርግጥ, ትክክለኛውን ፍጆታ እንለካለን, እና አስፈላጊ ከሆነ, ተጨማሪ ባትሪዎችን ይጨምሩ.
በዚህ ሁሉ የጂፒኤስ ቢኮኖች ላይ ጨምሩበት፣ ያረፈውን የስትራቶስፌሪክ ፊኛ ለመፈለግ እንጠቀማለን። እና ሄርሜቲክ ሳጥኑ ለአገልጋዩ እና ለሌሎች መሳሪያዎች "ቤት" ይሆናል.

ጥቃቅን መሳሪያዎችን ከሙቀት እና የግፊት ለውጦች ይጠብቃል. በተመሳሳይ ጊዜ የጨረር መጠንን ይቀንሳል, ምንም እንኳን ይህ ለፕሮጀክታችን ምንም አይነት ሚና ባይጫወትም, አገልጋዩ በስትሮስቶስፌር ውስጥ ለአጭር ጊዜ ይበርራል, እና ዳራ በ ISS ላይ ከፍተኛ አይደለም.
ወደ መልእክቶች ከመላክ በተጨማሪ , በውድድር ውስጥ መሳተፍ እና ምርመራው የት እንደሚያርፍ መገመት ይችላሉ. ዋናው ሽልማቱ የሶዩዝ-ኤምኤስ-13 ሰው ሰራሽ መንኮራኩር ለመጀመር ወደ ባይኮንኑር የሚደረግ ጉዞ ነው።
ምንጭ: hab.com
