

U prugettu OpenBot 0.5 hè statu publicatu. Si tratta di sviluppà una piattaforma per creà robot à rote in muvimentu basati annantu à un smartphone regulare. AndroidA piattaforma, sviluppata da a divisione di ricerca di Intel, sviluppa l'idea di utilizà e capacità di calculu di i smartphone è u GPS integratu, u giroscopiu, a bussola è a camera per creà robot.
U software per u cuntrollu di i robot, l'analisi di u spaziu circundante è a navigazione autonoma hè implementatu cum'è una applicazione per a piattaforma AndroidU codice hè scrittu in Java, Kotlin è C++ è hè distribuitu sottu a licenza MIT. Si prevede chì a piattaforma serà utile per l'insignamentu di a robotica, a creazione rapida di prototipi di robot in muvimentu è a realizazione di ricerche relative à i piloti automatichi è a navigazione autonoma.
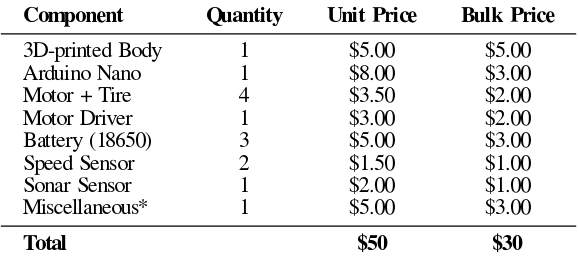
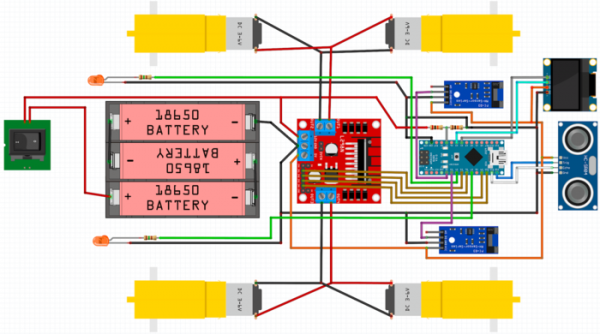
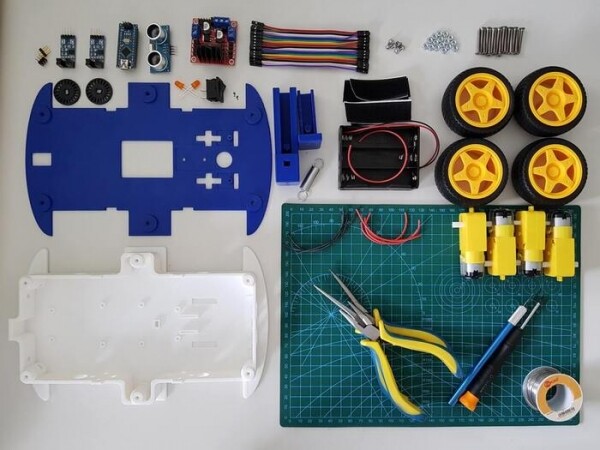
OpenBot vi permette di cumincià à sperimentà i robot in muvimentu à un costu minimu - per creà un robot, pudete fà cun un smartphone di gamma media è cumpunenti supplementari per un costu tutale di circa $ 50. U chassis per u robot, cum'è e parti cunnesse per attaccà un smartphone, sò stampati nantu à una stampante 3D secondu i schemi pruposti (se ùn ci hè micca una stampante 3D, pudete taglià u quadru di cartone o plywood). A propulsione hè furnita da quattru mutori elettrici.
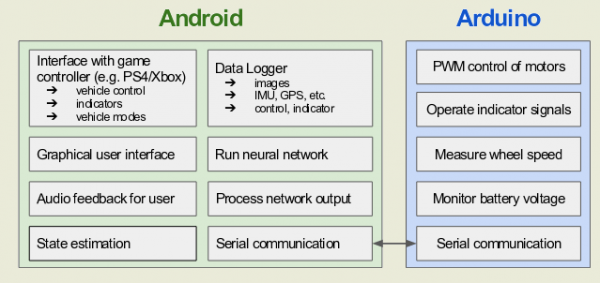
Una scheda Arduino Nano basata annantu à u microcontrollore ATmega328P hè aduprata per cuntrullà i motori, l'accessori è i sensori supplementari, è ancu per monitorà a carica di a batteria. Si cunnetta à un smartphone via USB. I sensori di velocità è u sonar à ultrasoni sò ancu supportati. U cuntrollu remotu di u robot pò esse realizatu via una app client. Android, via un urdinatore nant'à a listessa reta WiFi, via un navigatore web, o via un controller di ghjocu cumpatibile cù Bluetooth (cum'è PS4, XBox è X3).
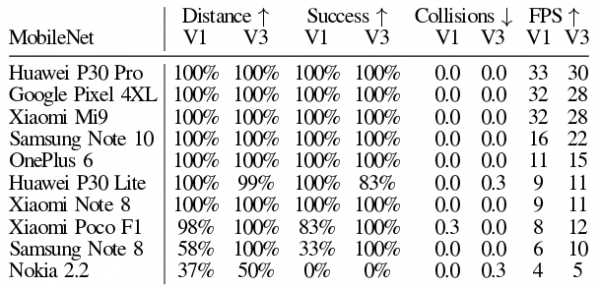
U software di cuntrollu chì funziona in un smartphone include un sistema d'apprendimentu di macchina per a ricunniscenza di l'ughjettu (circa 80 tippi d'uggetti sò definiti) è eseguisce funzioni di pilotu automaticu. L'applicazione permette à u robot di determinà l'uggetti desiderati, evità ostaculi, seguità l'ughjettu sceltu è risolve i prublemi di navigazione autonoma. Per esempiu, un robot pò spustà in un locu specificu in modu autopilot, adattendu à l'ambienti cambianti. U muvimentu pò ancu esse cuntrullatu manualmente, aduprendu u robot cum'è una camera in muvimentu cù u cuntrollu remoto.

A nova versione include una riprogettazione significativa di u firmware Arduino, chì avà supporta altri tipi di robot (RTR è RC). L'app per Android Hè statu aghjuntu u supportu per un novu protocolu di messageria cù u firmware di u microcontrollore, hè statu implementatu u trattamentu di i missaghji di cunfigurazione è hè statu riprogettatu u supportu di u controller di ghjocu. Sò stati aghjunti i mudelli stampabili in 3D per u novu chassis RC-Truck.

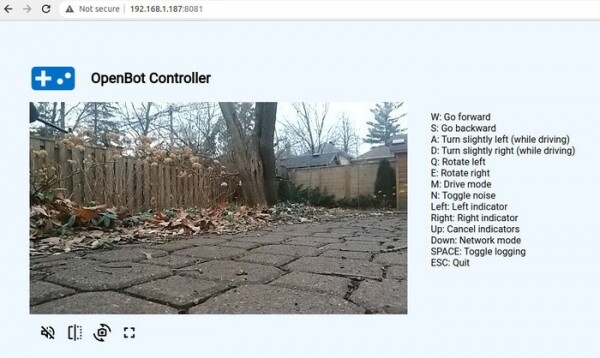
Un buttone per cambià a camera nantu à u robot hè statu aghjuntu à l'applicazione di u cliente è u supportu per u protocolu RTSP hè statu discontinuatu in favore di WebRTC. L'interfaccia web basata in Node.js furnisce a capacità di cuntrullà remotamente u muvimentu di u robot attraversu un navigatore cù dati trasmessi da a videocamera di u robot utilizendu WebRTC.
Source: opennet.ru
