

В ဩဂုတ်လတွင် Habrazhitels အားလုံးအတွက် ဆုများပါသော ပြိုင်ဆိုင်မှုတစ်ခု ပြုလုပ်မည်ဖြစ်ကြောင်း ကျွန်ုပ်တို့ပြောခဲ့သည်။ လျှို့ဝှက်ဖုံးအုပ်ကို ဖြိုဖျက်ဖို့ အချိန်ရောက်လာပြီ။ တစ်နည်းတစ်ဖုံ “တိမ်ထဲတွင် ဆာဗာ” ဟူသော စကားစုကို စာသားအတိုင်း ယူဆောင်နိုင်သည်ဟု ကျွန်ုပ်တို့ စိတ်ကူးရခဲ့သည်။ pinged လုပ်လို့ရတဲ့ ကောင်းကင်မှာ အလုပ်လုပ်တဲ့ ဆာဗာကို လွှင့်တင်လိုက်ကြရအောင်။ အစပိုင်းမှာတော့ အိုင်ဒီယာက ရူးသွပ်သွားသလိုလို၊ ဒါပေမယ့် ဒီနည်းနဲ့ လှည့်ပတ်ပြီး နည်းလမ်းပေါင်းစုံနဲ့ ဆွေးနွေးပြီး နောက်ဆုံးမှာတော့ ငှက်တွေဆီ ဆာဗာကို ပို့ဖို့ နည်းလမ်းတစ်ခု ပေါ်လာခဲ့ပါတယ်။ ဩဂုတ်လကုန်တွင် ခေတ်စားလာမည့် မိတ်ဆက်ပွဲကို ပြုလုပ်မည်ဖြစ်သော်လည်း ယခုအခါ ပရောဂျက်၏ ဟာ့ဒ်ဝဲအပိုင်းကို လုပ်ဆောင်နေပါသည်။ အသေးစိတ်အချက်အလတ်များကို အောက်တွင်ဖော်ပြထားပါသည်။
- ဆာဗာသည် Raspberry Pi 3 ကိုအခြေခံမည်ဖြစ်သည်။
ယူနစ်တစ်ခုတည်းဆာဗာကို လေထဲသို့ လွှင့်တင်ခြင်းသည် စိတ်ဝင်စားဖွယ်ကောင်းသော်လည်း ၎င်း၏အလေးချိန် + UPS ၏အလေးချိန်... ဤအရာအားလုံးသည် များပြားလှသော lifting force လိုအပ်မည်ဖြစ်သည်။ အကယ်၍ ကျစ်လစ်သိပ်သည်းသော Raspberry Pi 3 ကိုအခြေခံ၍ အကယ်၍ Tim Berners-Lee သည် 1991 ခုနှစ်တွင် ပျော်ရွှင်ခဲ့ဖူးသော ကွန်ပြူတာစွမ်းအားထက် အဆပေါင်းရာနှင့်ချီသော ကွန်ပြူတာစွမ်းအားဖြင့် အတော်လေးကောင်းမွန်သောဆာဗာကို သင်အသုံးချနိုင်သည်ဆိုပါက၊
- ဆာဗာကို လေပူဖောင်းဖြင့် ပစ်တင်လိုက်ကြပါစို့
ကျွန်ုပ်တို့တွင် ဆာဗာအား ဟီလီယမ်စုံစမ်းစစ်ဆေးခြင်းတွင် လွှင့်တင်ရန် စိတ်ကူးရှိခဲ့သော်လည်း၊ ထို့နောက်တွင် ဆာဗာသည် ရှားပါးသောလေထုထဲတွင် မြင့်မားသောလေထုတွင် ပူဖောင်းပေါက်ကွဲပြီး အဆောက်အဦတစ်ခုလုံး မြေပြင်ပေါ်သို့ ပြုတ်ကျမသွားမီ အချိန်အတော်ကြာအောင် ဆာဗာသည် ping ဖြစ်မည်မဟုတ်ပေ။ ငါလေထုအချိန် "ပြတင်းပေါက်" ကိုတစ်နာရီခွဲအထိတိုးချဲ့ချင်တယ်။ ပြီးတော့ မီးပုံးပျံသုံးဖို့ ဆုံးဖြတ်လိုက်တယ်။ ပျံသန်းချိန်သည် နှစ်နာရီဖြစ်သည်။ ထို့အပြင်၊ ပျံသန်းမှုကို လုံးလုံးလျားလျား မထိန်းချုပ်နိုင်သော်လည်း၊ ချို့ယွင်းချက်တစ်ခုဖြစ်လာပါက နေရာမှန်တွင် လျှင်မြန်စွာ “ဖွင့်/ပိတ်” လုပ်နိုင်သည့် ခြင်းတောင်းထဲတွင် ကျွန်ုပ်တို့၏ အင်ဂျင်နီယာလည်း ရှိနိုင်ပါသည်။
- ကျွန်ုပ်တို့သည် သယ်ယူပို့ဆောင်ရေးကွန်ရက်အဖြစ် ဆယ်လူလာဆက်သွယ်ရေးကို အသုံးပြုပါမည်။
ခေတ်မီ WiFi အင်တင်နာများသည် အကွာအဝေးကို “ဖောက်” နိုင်သော်လည်း ယင်းအတွက် စစ်တပ်ရေဒါစခန်းတစ်ခုနှင့် ၎င်း၏ ကန့်သတ်သတ်မှတ်ချက်များတွင် များစွာမယုတ်မာသည့် ဆက်သွယ်ရေးရှုပ်ထွေးမှုကို တည်ဆောက်ရန် လိုအပ်မည်ဖြစ်သည်။ 1,5-2 နာရီကြာဆက်သွယ်ရေးအတွက်ကြောင့်၊ မီးပုံးပျံ၏အမြင့်တွင်၊ ဆယ်လူလာဆက်သွယ်ရေးသည်တည်ငြိမ်စွာအလုပ်လုပ်ရမည်ဖြစ်သောကြောင့်ထိုကဲ့သို့သောစနစ်ကိုတည်ဆောက်ရန်အဓိပ္ပါယ်မရှိပေ။
ဤ “postulates” ကို ရေးဆွဲပြီးနောက်၊ ပရောဂျက်သည် လက်တွေ့မဆန်တော့ဘဲ၊ မကြာမီ ကျွန်ုပ်တို့သည် ဦးတည်ချက်သုံးရပ်စလုံးကို တစ်ပြိုင်နက် လုပ်ဆောင်လာကြသည်။
ပထမဆုံးအနေနဲ့ ယောက်ျားတွေဆီကနေ လှည့်ကြည့်တယ်။ (နောက်ဆက်တွဲရှာဖွေကယ်ဆယ်ရေးနှင့်အတူ) လေထဲသို့သံမျိုးစုံကိုလွှင့်တင်ရင်းခွေးကိုစားခဲ့သည်။
ထို့နောက် ကျွန်ုပ်တို့၏ စီမံခန့်ခွဲသူ၏ အိပ်ရာဘေး စားပွဲ၌ လဲလျောင်းနေသော Raspberry Pi 3 ကို ထုတ်ယူကာ စတင်သတ်မှတ်လိုက်ပါသည်။
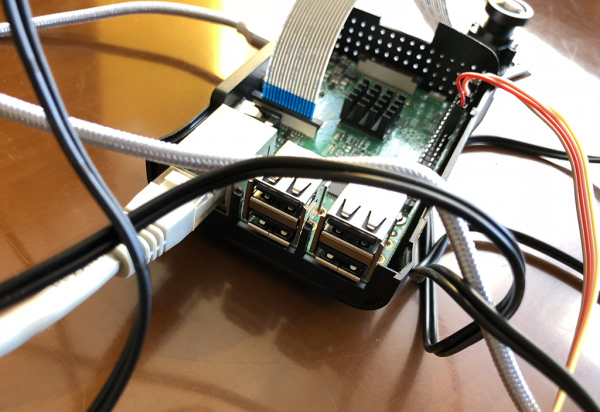
ကင်မရာကို ချိတ်ဆက်ထားသည်-
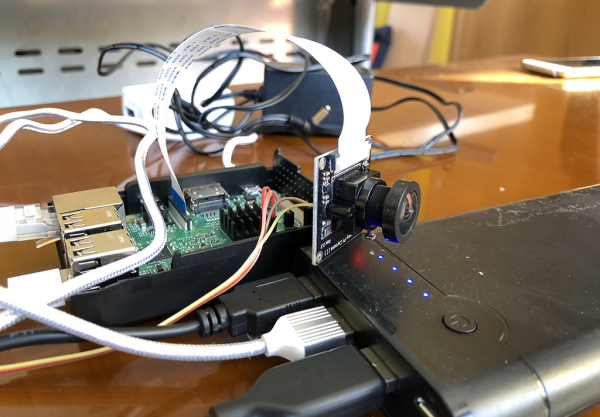
ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ “Semyon” တွင် ၎င်းကို စမ်းသပ်ခဲ့သည်။

Semyon သည် မော်ဒယ်နှင့် လက်ထောက်တစ်ဦးအဖြစ် အလွန်အဆင်ပြေသည် - သူသည် အစာမတောင်း၊ ဖုန်းဖြင့် မအာရုံမစိုက်၊ အမြဲတမ်း စိတ်ကောင်းရှိပြီး သူ့ခမောက်လုံးအနှံ့မှ ကျယ်ပြောသော အပြုံးဖြင့် ဟုတ်ပါတယ်၊ ပျံသန်းမှုအတွက် အဲဒီလို အာကာသဝတ်စုံ မလိုအပ်ပါဘူး၊ ဒါပေမယ့် ဒါဟာ ရုံးခန်းထဲမှာ မှန်ကန်တဲ့ လေထုကို ဖန်တီးပေးပါတယ်။
စီမံကိန်းအကြမ်းဖျင်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။

Powerbank ကို မြေပြင်စမ်းသပ်ခြင်းအတွက် အသုံးပြုသည်၊ လွှတ်တင်ရန်အတွက် ပိုမိုစိတ်ချရသော အရာတစ်ခု လိုအပ်ပါသည်။
ဟာ့ဒ်ဝဲ၏ စိတ်ဝင်စားစရာအကောင်းဆုံးအပိုင်းသည် အာရုံခံကိရိယာအားလုံးထံမှ ဒေတာလက်ခံရရှိရန် ဘုတ်တစ်ခု ဖြစ်နိုင်သည်-
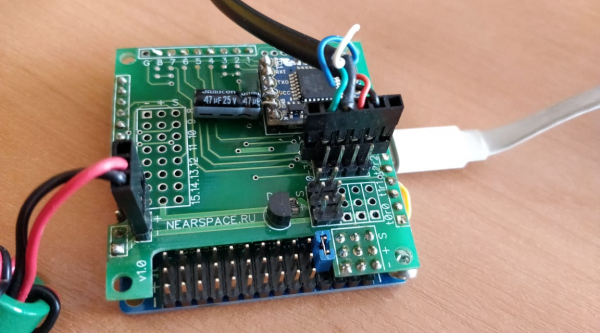
ယောက်ျားတွေဆီက ကျွန်ုပ်တို့သည် အမျိုးမျိုးသော analogues များဖြင့် အချိန်အတော်ကြာ ရုန်းကန်ခဲ့ရပြီး နောက်မှ ကျွန်ုပ်တို့သည် စက်ပေါ်ကွန်ပြူတာကို ကိုယ်တိုင်ပြုလုပ်ခဲ့ပြီး၊ ယုံကြည်စိတ်ချရမှုသည် အဆုံးအဖြတ်အရေးကြီးသောကြောင့်၊ ပရောဂျက်တစ်ခုလုံး၏ ကံကြမ္မာသည် telemetry data ပေါ်တွင်မူတည်ပါသည်။ စက်ပေါ်ရှိ ကွန်ပျူတာသည် ချိတ်ဆက်ထားသော အာရုံခံကိရိယာများထံမှ ဒေတာများကို လက်ခံရယူပြီး Raspberry Pi သို့ ပို့လွှတ်ရန် တာဝန်ရှိသည်။
ကျွန်ုပ်တို့ ၎င်းကို စတင်ထုတ်လုပ်ခဲ့ပြီး၊ ၎င်းကို စီစဉ်သတ်မှတ်ပြီး ရက်သတ္တပတ်အနည်းငယ်ကြာ ပရိုဂရမ်ရေးဆွဲခြင်းနှင့် ပတ်သာများဖြင့် ထိုင်ပြီးနောက်၊ တယ်လီမီတာဒေတာနှင့် Semyon ၏ ဓာတ်ပုံကို ထောင့်ကျယ်ကင်မရာမှ ရယူနိုင်ခဲ့သည်။

Telemetry ဒေတာကို အောက်ပါပုံစံဖြင့် လိုင်းတစ်ခုတွင် ထုတ်လွှင့်သည်-
ထို့နောက် ဤကုဒ်သည် string ကို array တစ်ခုအဖြစ်သို့ ပြောင်းလဲပြီး ဒေတာကို ဆိုက်သို့ ထုတ်ပေးသည်-
$str = 'N:647;T:10m55s;MP.Stage:0;MP.Alt:49;MP.VSpeed:0.0;MP.AvgVSpeed:0.0;Baro.Press:1007.06;Baro.Alt:50;Baro.Temp:35.93;GPS.Coord:N56d43m23s,E37d55m68s;GPS.Home:N56d43m23s,E37d55m68s;Dst:5;GPS.HSpeed:0;GPS.Course:357;GPS.Time:11h17m40s;GPS.Date:30.07.2018;DS.Temp:[fc]=33.56;Volt:5.19,0.00,0.00,0.00,0.00,0.00,0.00,0.00';
parse_str(strtr($str, [
':' => '=',
';' => '&'
]), $result);
print_r($result);အချက်အလက်အချို့၏ ဖော်ပြချက်-
- N:2432; - ဒေတာပက်ကေ့ချ်နံပါတ်၊ အမြဲတိုးများလာသည်။
- T:40m39s; - ပျံသန်းမှု ထိန်းချုပ်ကိရိယာကို ဖွင့်ထားချိန်မှစ၍ အချိန်
- MP.Stage:0; — ပျံသန်းမှုအဆင့် (0 — မြေပြင် သို့မဟုတ် 1 ကီလိုမီတာအောက်၊ 1 — တောင်တက်၊ 2 — အမြင့်တွင် ပျံဝဲနေသည်၊ 3 — ဆင်းသက်ခြင်း)
- MP.Alt:54; — ပင်လယ်ရေမျက်နှာပြင်မှ မီတာအတွင်း barometric အမြင့်ပေ — ၎င်းကိုပြသသင့်သည်။
- MP.VSpeed:0.0; — အလယ်အလတ်စစ်ထုတ်မှုဖြင့် ဒေါင်လိုက်အမြန်နှုန်း
- MP.AvgVSpeed:0.0; - ပျမ်းမျှစစ်ထုတ်မှုဖြင့် တစ်စက္ကန့်လျှင် မီတာဖြင့် ဒေါင်လိုက်အမြန်နှုန်း
- Baro.Press:1006.49; - မီလီဘာဘာရိုမီတာဖိအား
- Baro.Alt:54; - barometer အရအမြင့်
- Baro.Temp:36.99; - ဘားရိုမီတာကိုယ်တိုင်၏အပူချိန်
- GPS.Coord:N56d43m23s၊E37d55m68s; - လက်ရှိသြဒိနိတ်များ
- GPS.Home:N56d43m23s၊E37d55m68s; - အစမှတ်၏သြဒိနိတ်များ
- GPS.Alt:165; - GPS အမြင့်မီတာ
- GPS.Dst:10; - စတင်မှတ်မှ မီတာအကွာအဝေး
- DS.Temp:[fc]=34.56; - ဘုတ်ပေါ်တွင်အပူချိန်အာရုံခံကိရိယာ
အထွက်ပုံသဏ္ဍန်၊
Array
(
[N] => 647
[Т] => 10m55з
[MP_Stage] => 0
[MP_Alt] => 49
[MP_VSpeed) => 0.0
[MP_AvgVSpeed] => 0.0
[Baro Рrеss] => 1007.06
[Baro_Alt] => 50
[Baro_Temp] => 35.93
[GPS_Coord] => N56d43m23s,E37d55m68s
[GPS_Home) => N56d43m23s,E37d55m68s
[Dst] => 5
[GPS_HSpeed] => 0
[GPS_Course] => 357
[GPS_Time] => 11h17m40s
[GPS_Date] => 30.07.2018
[DS_Temp] => [fс] ЗЗ.56
[Volt] => 5.19, 0.00,0.00,0.00,0.00,0.00,0.00,0.00
)
ဆယ်လူလာ ဆက်သွယ်မှု “ပြုတ်ကျ” ပါက ဘာလုပ်ရမလဲ။ ဤကိစ္စအတွက်၊ ကျွန်ုပ်တို့တွင် ဒုတိယကတ်တစ်ခု ရှိသည်၊ ဆင်းမ်ကတ်နှစ်ကတ်ကို modem တွင် ထည့်သွင်းထားသည် (တစ်ကြိမ်လျှင် အပေါက်တစ်ပေါက်)။

ပင်မလိုင်း ရုတ်တရက် တုံ့ပြန်မှု ရပ်သွားပါက ၎င်းသည် အားလပ်သည့်ချန်နယ်သို့ အလိုအလျောက်ပြောင်းနိုင်သည်။
ဆယ်လူလာကွန်ရက်နှစ်ခုလုံး မရရှိနိုင်ပါက ဘာဖြစ်နိုင်သနည်း။
 (ကောင်လေး “ဖြစ်နိုင်ခြေ သီအိုရီ” ကို သူဖတ်တာက ဘာအတွက်မှ မဟုတ်ပါဘူး)
(ကောင်လေး “ဖြစ်နိုင်ခြေ သီအိုရီ” ကို သူဖတ်တာက ဘာအတွက်မှ မဟုတ်ပါဘူး)
ဤကိစ္စတွင်၊ ကျွန်ုပ်တို့တွင် ၎င်း၏တည်နေရာအကြောင်း အချက်ပြမှုကို ပေးပို့သည့် သီးခြား GPS ခြေရာခံကိရိယာတစ်ခု ရှိပါမည်။ ၎င်းသည် ဆယ်လူလာကွန်ရက်မှတဆင့်မဟုတ်ဘဲ၊ အကွာအဝေးကိုမည်သူမှအာမခံမည်မဟုတ်သော်လည်း ဂြိုလ်တုမှတဆင့်ရရှိနိုင်မှုကို သတိပြုပါ။

ဟုတ်ပါသည်၊ GPS ခြေရာခံကိရိယာသည် James Bond ၏အရေပြားအောက်တွင်ထည့်သွင်းထားသောကိရိယာထက်အနည်းငယ်ပိုကြီးသည်။ ကျွန်ုပ်တို့၏ပြိုင်ဆိုင်မှုသည် ပျံသန်းနေသောဆာဗာ၏သြဒိနိတ်များပေါ်တွင်မူတည်သောကြောင့်၊ ဘုတ်အဖွဲ့မှရရှိသောဒေတာ၏ဤအစိတ်အပိုင်းသည် အရေးကြီးဆုံးဖြစ်လိမ့်မည်။ ဒါပေမယ့် ဒီအကြောင်းကို နောက် post မှာ ပြောပါမယ်။ မကြာမီလာမည်၊ ကျွန်ုပ်တို့၏ဘလော့ဂ်ကို လိုက်နာပါ။
ဘောလုံးက ဘယ်ကိုရောက်မယ်ဆိုတာ ချက်ခြင်းမှန်းဆချင်သူတွေအတွက် ပြိုင်ဆိုင်မှုတစ်ခုတောင် ကြေညာလိုက်တဲ့အတွက် လုပ်ငန်းတစ်ခုလုံးရဲ့ အောင်မြင်မှုကို ကျွန်တော်တို့ အရမ်းယုံကြည်ပါတယ်။ ကျွန်ုပ်တို့၏အသေးစိတ်အချက်များ .
source: www.habr.com
