


A la indústria, més del 60% de l'electricitat es consumeix per accionaments elèctrics asíncrons: en instal·lacions de bombeig, compressors, ventilació i altres. Aquest és el tipus de motor més senzill i, per tant, més barat i fiable.
El procés tecnològic de diverses produccions industrials requereix canvis flexibles en la velocitat de rotació de qualsevol actuador. Gràcies al ràpid desenvolupament de la tecnologia electrònica i informàtica, així com al desig de reduir les pèrdues d'electricitat, han aparegut dispositius per al control econòmic de motors elèctrics de diversos tipus. En aquest article parlarem de com garantir el control més eficient d'un accionament elèctric. Treballant en una empresa (grup d'empreses ), veig que els nostres clients estan cada cop més atents a l'eficiència energètica
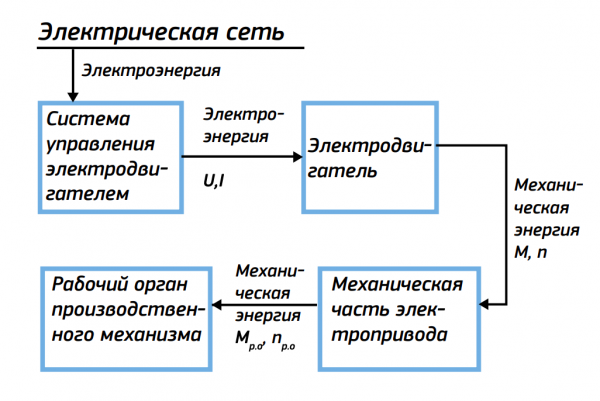
La major part de l'energia elèctrica consumida per les plantes de fabricació i procés s'utilitza per realitzar algun tipus de treball mecànic. Per impulsar les peces de treball de diversos mecanismes de producció i tecnològics, s'utilitzen principalment motors elèctrics asíncrons amb rotor de gàbia d'esquirol (en el futur parlarem d'aquest tipus de motor elèctric). El propi motor elèctric, el seu sistema de control i el dispositiu mecànic que transmet el moviment de l'eix del motor al mecanisme de producció formen un sistema d'accionament elèctric.
La presència de pèrdues d'electricitat mínimes als bobinatges a causa de la regulació de la velocitat de rotació del motor, la possibilitat d'un arrencada suau a causa d'un augment uniforme de la freqüència i la tensió: aquests són els principals postulats del control efectiu dels motors elèctrics.
Després de tot, abans hi havia i encara existeixen mètodes de control del motor com:
- control de freqüència reostàtica mitjançant la introducció de resistències actives addicionals en els circuits de bobinats del motor, curtcircuitat seqüencialment per contactors;
- canvi de tensió als terminals de l'estator, mentre que la freqüència d'aquesta tensió és constant i igual a la freqüència de la xarxa de CA industrial;
- regulació de passos canviant el nombre de parells de pols del bobinatge de l'estator.
Però aquests i altres mètodes de regulació de freqüència porten amb ells el principal inconvenient: pèrdues significatives d'energia elèctrica i la regulació de passos, per definició, no és un mètode prou flexible.
Les pèrdues són inevitables?
Detenem-nos amb més detall en les pèrdues elèctriques que es produeixen en un motor elèctric asíncron.
El funcionament d'un accionament elèctric es caracteritza per una sèrie de magnituds elèctriques i mecàniques.
Les magnituds elèctriques inclouen:
- tensió de xarxa,
- corrent del motor,
- flux magnètic,
- força electromotriu (EMF).
Les principals magnituds mecàniques són:
- velocitat de rotació n (rpm),
- parell de gir M (N•m) del motor,
- potència mecànica del motor elèctric P (W), determinada pel producte del parell i la velocitat de gir: P=(M•n)/(9,55).
Per indicar la velocitat del moviment de rotació, juntament amb la freqüència de rotació n, s'utilitza una altra quantitat coneguda de la física: la velocitat angular ω, que s'expressa en radians per segon (rad/s). Hi ha la següent relació entre la velocitat angular ω i la freqüència de rotació n:

tenint en compte quina fórmula pren la forma:

La dependència del parell M del motor de la velocitat de rotació del seu rotor n s'anomena característica mecànica del motor elèctric. Tingueu en compte que quan una màquina asíncrona funciona, l'anomenada potència electromagnètica es transmet des de l'estator al rotor a través de l'entrefer mitjançant un camp electromagnètic:

Part d'aquesta potència es transmet a l'eix del rotor en forma de potència mecànica segons l'expressió (2), i la resta s'allibera en forma de pèrdues en les resistències actives de les tres fases del circuit del rotor.
Aquestes pèrdues, anomenades elèctriques, són iguals a:

Així, les pèrdues elèctriques es determinen pel quadrat del corrent que passa pels bobinatges.
Estan determinats en gran mesura per la càrrega del motor asíncron. Tots els altres tipus de pèrdues, excepte les elèctriques, canvien menys significativament amb la càrrega.
Per tant, considerem com canvien les pèrdues elèctriques d'un motor asíncron quan es controla la velocitat de rotació.
Les pèrdues elèctriques directament al bobinat del rotor d'un motor elèctric s'alliberen en forma de calor a l'interior de la màquina i, per tant, determinen el seu escalfament. Òbviament, com més grans siguin les pèrdues elèctriques al circuit del rotor, menor serà l'eficiència del motor, menys econòmic serà el seu funcionament.
Tenint en compte que les pèrdues de l'estator són aproximadament proporcionals a les pèrdues del rotor, el desig de reduir les pèrdues elèctriques al rotor és encara més comprensible. Aquest mètode de regulació de la velocitat del motor és econòmic, en què les pèrdues elèctriques al rotor són relativament petites.
De l'anàlisi de les expressions es desprèn que la forma més econòmica de controlar els motors és a una velocitat del rotor propera a la síncrona.
Unitats de freqüència variable
Instal·lacions com els accionaments de freqüència variable (VFD), també anomenats convertidors de freqüència (FC) ). Aquests paràmetres permeten canviar la freqüència i l'amplitud de la tensió trifàsica subministrada al motor elèctric, de manera que s'aconsegueix un canvi flexible en els modes de funcionament dels mecanismes de control.
 Unitat de freqüència variable d'alta tensió
Unitat de freqüència variable d'alta tensió
 Disseny VFD
Disseny VFD
Aquí hi ha una breu descripció dels convertidors de freqüència existents.
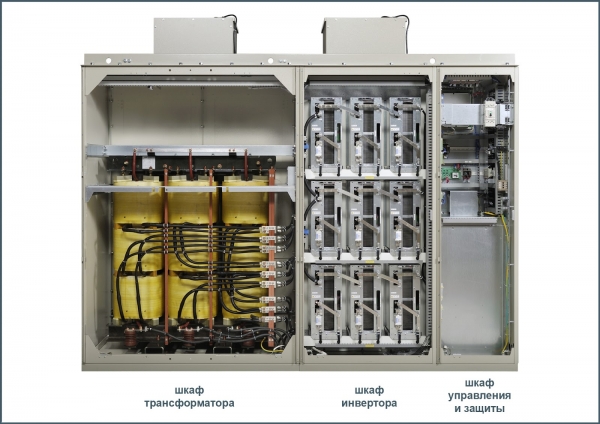
Estructuralment, el convertidor consta de blocs relacionats funcionalment: bloc del transformador d'entrada (armari del transformador); un inversor multinivell (armari inversor) i un sistema de control i protecció amb una unitat d'entrada i visualització d'informació (armari de control i protecció).
L'armari del transformador d'entrada transfereix energia des de la font d'alimentació trifàsica a un transformador d'entrada de bobinats múltiples, que distribueix la tensió reduïda a un inversor multinivell.
Un inversor multinivell consta de cèl·lules unificades: convertidors. El nombre de cèl·lules està determinat pel disseny i fabricant específics. Cada cèl·lula està equipada amb un rectificador i un filtre d'enllaç DC amb un inversor de tensió de pont que utilitza moderns transistors IGBT (transistor bipolar de porta aïllada). El corrent de CA d'entrada es rectifica inicialment i després es converteix en corrent altern amb freqüència i tensió ajustables mitjançant un inversor d'estat sòlid.
Les fonts resultants de tensió alterna controlada es connecten en sèrie en enllaços, formant una fase de tensió. La construcció d'un sistema d'alimentació de sortida trifàsica per a un motor asíncron es realitza connectant enllaços segons el circuit "STAR".
El sistema de control de protecció es troba a l'armari de control i protecció i està representat per una unitat de microprocessador multifuncional amb un sistema d'alimentació des de la font d'alimentació pròpia del convertidor, un dispositiu d'entrada/sortida d'informació i sensors primaris dels modes de funcionament elèctric del convertidor.
Potencial d'estalvi: comptar junts
A partir de les dades proporcionades per Mitsubishi Electric, avaluarem el potencial d'estalvi d'energia quan introduïm convertidors de freqüència.
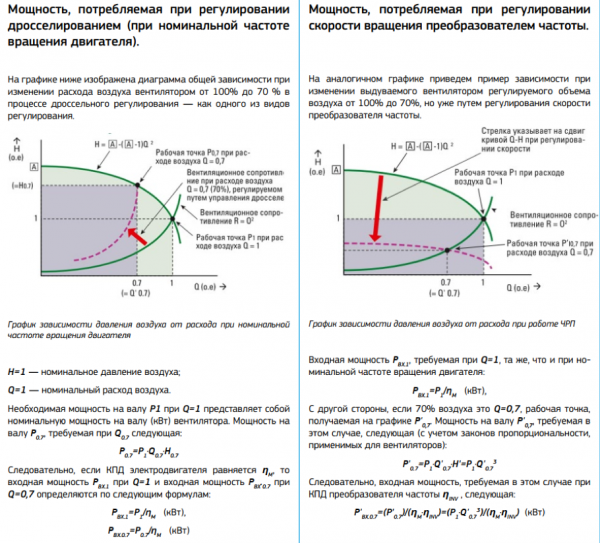
Primer, vegem com canvia la potència en diferents modes de control del motor:
Ara donem un exemple de càlcul.
Eficiència del motor elèctric: 96,5%;
Eficiència de la unitat de freqüència variable: 97%;
Potència de l'eix del ventilador al volum nominal: 1100 kW;
Característiques del ventilador: H = 1,4 p.u. en Q=0;
Jornada completa anual: 8000 h.
Modes de funcionament del ventilador segons l'horari:
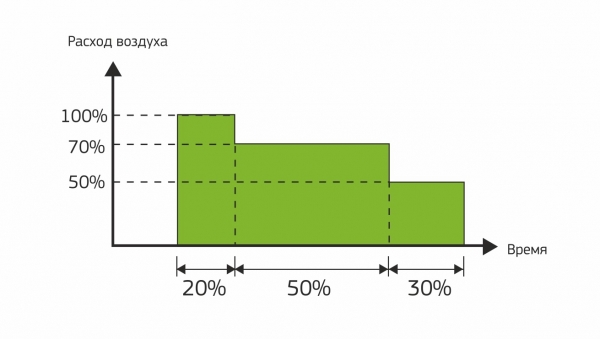
Del gràfic obtenim les dades següents:
100% de consum d'aire - 20% del temps de funcionament anual;
70% de consum d'aire - 50% del temps de funcionament anual;
50% de consum d'aire - 30% de temps de funcionament anual.
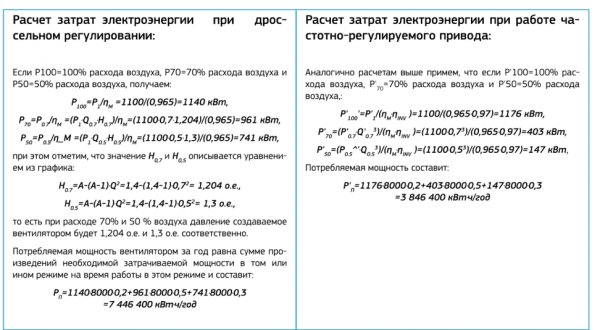
L'estalvi entre el funcionament a càrrega nominal i el funcionament amb la capacitat de controlar la velocitat del motor (funcionament conjuntament amb un VFD) són iguals a:
7 kWh/any - 446 kWh/any= 400 kWh/any
Tinguem en compte la tarifa elèctrica igual a 1 kWh / 5,5 rubles. Val la pena assenyalar que el cost es pren segons la primera categoria de preu i el valor mitjà d'una de les empreses industrials del territori de Primorsky per al 2019.
Aconseguim l'estalvi en termes monetaris:
3 kWh/any* 600 fregues/kWh= 000 rubles/any
La pràctica d'implementar aquests projectes permet, tenint en compte els costos d'operació i reparacions, així com el cost dels propis convertidors de freqüència, aconseguir un període d'amortització de 3 anys.
Com mostren les xifres, no hi ha dubte sobre la viabilitat econòmica d'introduir els VFD. Tanmateix, l'efecte de la seva implementació no es limita només a l'economia. Els VFD engeguen el motor sense problemes, reduint significativament el seu desgast, però en parlaré la propera vegada.
Font: www.habr.com
