

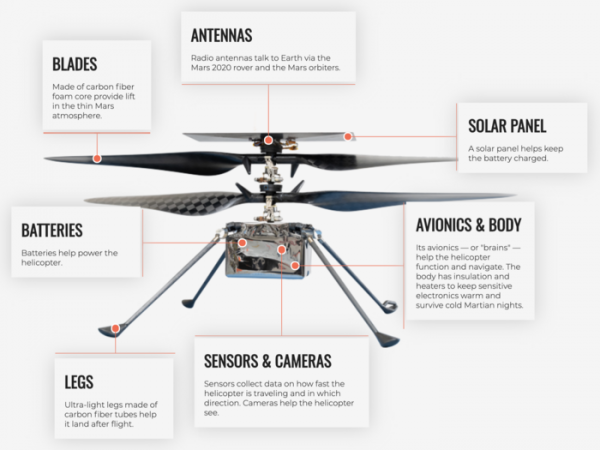
Представители космического агентства NASA в интервью изданию Spectrum IEEE раскрыли подробности о начинке автономного вертолёта-разведчика Ingenuity, вчера успешно приземлившегося на Марс в составе миссии Марс-2020. Особенностью проекта стало использование управляющей платы на базе SoC Snapdragon 801 от компании Qualcomm, который применяется при производстве смартфонов. Программная начинка Ingenuity основана на ядре Linux и открытом полётном ПО. Отмечается, что это первое использование Linux в аппаратах, отправленных на Марс. Более того, использование открытого ПО и доступных в широкой продаже аппаратных элементов даёт возможность заинтересованным энтузиастам собирать аналогичные дроны самостоятельно.
Ova odluka je potaknuta činjenicom da upravljanje letećim dronom zahtijeva znatno više računalne snage nego upravljanje roverom na Marsu, koji je opremljen posebno izrađenim čipovima s dodatnom zaštitom od zračenja. Na primjer, održavanje leta zahtijeva kontrolnu petlju koja radi na 500 ciklusa u sekundi i analizu slike na 30 sličica u sekundi.
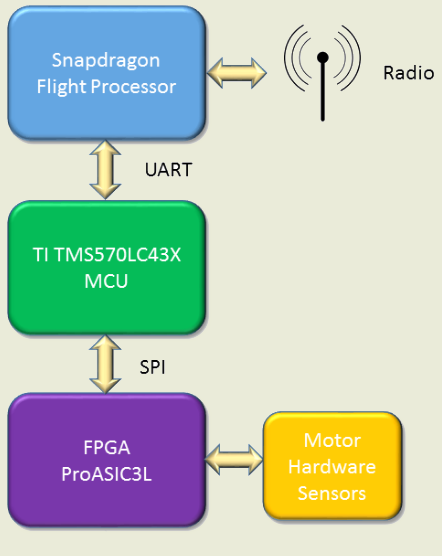
SoC Snapdragon 801 (четыре ядра, 2.26 GHz, 2 ГБ ОЗУ, 32 ГБ Flash) применяется для обеспечения работы базового системного окружения на основе Linux, на которое возложено выполнение высокоуровневых операций, таких как визуальная навигация на основе анализа изображений с камеры, управление данными, обработка команд, формирование телеметрии и поддержание канала беспроводной связи.
Procesor je putem UART sučelja spojen na dva mikrokontrolera (Texas Instruments TMS570LC43x MCU, ARM Cortex-R5F, 300 MHz, 512 KB RAM-a, 4 MB Flash-a, UART, SPI, GPIO) koji obavljaju funkcije upravljanja letom. Dva mikrokontrolera osiguravaju redundanciju u slučaju kvara i primaju identične podatke senzora. Samo je jedan mikrokontroler aktivan u određenom trenutku, dok drugi služi kao rezerva i može preuzeti kontrolu u slučaju kvara. MicroSemi ProASIC3L FPGA odgovoran je za prijenos podataka sa senzora na mikrokontrolere i interakciju s aktuatorima koji upravljaju lopaticama, a također izvodi prebacivanje na rezervni mikrokontroler.
Hardver drona uključuje laserski visinomjer tvrtke SparkFun Electronics, koja razvija hardver otvorenog koda i jedan je od kreatora definicije hardvera otvorenog koda (OSHW). Ostale tipične komponente uključuju žirostabilizator (IMU) i videokamere, slične onima koje se nalaze u pametnim telefonima. Jedna VGA kamera koristi se za praćenje lokacije, smjera i brzine pomoću usporedbe kadar po kadar. Druga kamera u boji od 13 megapiksela koristi se za snimanje slika okolnog područja.
Komponente softvera za upravljanje letom razvijene su u NASA-inom Laboratoriju za mlazni pogon (JPL) za male i ultramale umjetne Zemljine satelite (Cubesat) i razvijaju se već nekoliko godina kao dio otvorene platforme F Prime (F´), distribuirane pod licencom Apache 2.0.
F Prime pruža alate za brzi razvoj sustava za upravljanje letom i povezanih ugrađenih aplikacija. Softver za let podijeljen je na pojedinačne komponente s dobro definiranim API-jima. Uz specijalizirane komponente, nudi C++ okvir s mogućnostima kao što su obrada reda poruka i višenitnost, kao i alate za modeliranje za povezivanje komponenti i automatsko generiranje koda.
Izvor: opennet.ru
