

«„on võistlus humanitaar- ja inseneriteaduste bakalaureuse- ja magistriõppe üliõpilastele. Selle korraldavad suured Venemaa IT-ettevõtted ja riigi juhtivad ülikoolid, sealhulgas ITMO ülikool. Täna arutame olümpiaadi eesmärke ja kahte valdkonda, mida meie ülikool haldab – suurandmeid ja robootikat (ülejäänuid käsitleme tulevastes Habra teemades).
vaade: /unsplash.com
Paar sõna olümpiamängude kohta
Eesmärk. Hinnake õpilaste teadmisi ja tutvustage neile tööandjate nõudeid. Õpilased arenevad oma valitud teadusvaldkonnas rahvusvahelistes ettevõtetes töötades. Ka tööandjad saavad kasu – nad ei pea koolitatud spetsialiste ümber koolitama ega uusi töötajaid tervitama fraasiga "Unustage kõik, mida ülikoolis õppisite".
Miks osaleda? Võitjad Astuge Venemaa ülikoolidesse ilma sisseastumiseksamiteta. Praktikakohti pakutakse Yandexis, Sberbankis, IBS-is, Mail.ru-s ja teistes suurettevõtetes. Eelmisel aastal olid Venemaa ettevõtete pakkumised... enam kui neljasaja parima osaleja seast. Samuti saavad osaleda õpilased, kes on oma parimast küljest näidanud .
Kes osaleb? Kõikide erialade üliõpilased – nii tehnika-, humanitaar- kui ka loodusteaduste üliõpilased. Välja arvatud lõpetajad, magistrandid, residendid ja välisülikoolides õppivad üliõpilased.
Ürituse formaat. Registreeruda saab kuni 18. novembrini. Veebipõhine eelvoor toimub 22. novembrist kuni 8. detsembrini, aga kui sooritate edukalt vähemalt kaks Eelvooru võitjad pääsevad edasi jaanuarist märtsini toimuvatele võistlustele suuremates ülikoolides üle riigi. Olümpiaadi „Mina olen professionaal” tulemused avaldatakse aprillis. .
Sel aastal hõlmab olümpiaad 68 õppesuunda. ITMO ülikooli spetsialistid juhendavad neist viit: fotoonika, info- ja küberturvalisus, programmeerimine ja infotehnoloogia, suurandmed ning robootika. Kahte viimast käsitleme lähemalt.
Suured andmed
See õppesuund hõlmab kõiki suurandmete elutsükli tehnoloogiaid, sealhulgas andmete kogumist, salvestamist, töötlemist, modelleerimist ja tõlgendamist. Võitjad saavad sisseastumiseksamiteta vastu võtta ITMO ülikooli magistriõppesse: „Rakendusmatemaatika ja informaatika“, „Digitaalne tervishoid“, „Suurandmete finantstehnoloogiad“ ja .
Osalejatel on ka võimalus läbida praktika andmeteadlaste ja andmeinseneridena partnerettevõtetes, sealhulgas Riiklikus Kognitiivsete Uuringute Keskuses, Mail.ru-s, Gazpromnefti Teadus- ja Tehnikakeskuses, Rosneftis, Sberbankis ja ER-Telecomis.
„Viimastel aastatel on suurandmed muutunud üha populaarsemaks. Esmased andmete kogumise ja salvestamise tehnoloogiad arenevad ning tekivad uued digitaalsed mehhanismid (asjade internetis ja sotsiaalmeedias), et salvestada varem jälgimata protsesse,“ kommenteerib direktor Alexander Valerievich Bukhanovsky. ITMO Ülikool. "Tähelepanu pööratakse lisaks andmete salvestamise ja kasutamise protsessi korraldamisele ka järelduste ja otsuste põhjendamisele ning ennustusmudelite loomisele."
Millised on ülesanded? Neid valmistab ette meeskond ITMO Ülikool. Nad mõistavad, et suurandmete spetsialistil peavad olema põhiteadmised tõenäosusteooriast ja matemaatilisest statistikast, samuti masinõppest. Samuti peavad nad mõistma tänapäevaste tehisintellekti süsteemide loogikat ja metoodikat ning olema osavad R-is, Javas, Scalas, Pythonis (või muudes praktiliste probleemide lahendamise tööriistades).
Allpool toome näite olümpiaadi ühe etapi ülesandest.
Näidisülesanne: Klaster koosneb 50 serverist, millest igaühel on 12 saadaolevat südamikku. Ressursid jaotatakse dünaamiliselt ümber kaardistajate ja reduktorite vahel (ranget ressursside jagamist ei toimu). Määrake, mitu minutit sellises klastris töötaks MapReduce'i ülesanne, mis nõuab 1000 kaardistajat. Ühe kaardistaja käitusaeg on 20 minutit. Kui ülesandes on alles ainult üks reduktor, töötleb see kõik andmed 1000 minutiga. Vastus on täpne ühe kümnendkoha täpsusega.
A. 44.6
B. 43.2
C. 41.6
D. 50.0Õige vastusC
Kuidas valmistada. Võite alustada järgmiste ressurssidega:
- See võib olla kasulik iseseisvaks tööks probleemide lahenduste lähtekoodidega.
- See murranguline töö selgitab, miks tõenäosuslikud mudelid vajavad matemaatilist konstruktsiooni, näiteks σ-algebrat.
- Lihtne ja kasulik raamat, mis tutvustab juhuslike sündmuste tõenäosuse arvutamise põhitõdesid.
Siin on mõned kättesaadavamad rakendusstatistika raamatud erinevatele uurimisvaldkondadele. Nende autorid selgitavad punkti- ja intervallihinnangu probleemide lahendamise loogikat lihtsalt, kuid veenvalt:
Viited
Samuti leiate teavet temaatiliste kursuste kohta. olümpiaadi veebilehel.
Robootika
Robootika ühendab selliseid distsipliine nagu algoritmid, elektroonika ja mehaanika. See programm on soovitatav neile, kes praegu õpivad või valmistuvad astuma magistri- või doktoriõppesse tarkvaratehnika, rakendusmehaanika, rakendusmatemaatika ja arvutiteaduse või elektroonikatehnika alal. Tudengid, kes näitavad oma annet, saavad programmides tasuta osaleda."""Ja"» meie ülikool.
Millised on ülesanded? Magistri- ja bakalaureuseõppe üliõpilased lahendavad erinevaid probleeme. Kõik ülesanded aga kontrollivad laiaulatuslikke teadmisi juhtimisteooriast, infotöötlusest ja robotite modelleerimisest. Näiteks palutakse osalejatel testida süsteemi stabiilsust või juhitavust, valida struktuur või arvutada kontrolleri koefitsiente.
„Peame lahendama mobiilse või manipuleeriva roboti otsese või pöördkinemaatilise probleemi, töötama süsteemi jakobiaaniga ja otsima liigestes tasakaalustusmomente antud välise koormuse korral,“ ütleb Sergei Aleksejevitš Koljubin, direktori asetäitja. ITMO-s. „Programmeerimisväljakutseid tuleb ette – peate kirjutama väikese programmi roboti simuleerimiseks või trajektoori planeerimiseks Pythonis või C++-s.“
Finaalis peavad õpilased programmeerima roboti täitma partnerettevõtete – Venemaa Raudteede, Diakonti, KUKA ja teiste – määratud ülesandeid. Projektid hõlmavad mehitamata õhusõidukeid (UAV-sid) nii maale kui ka õhule, samuti koostööroboteid, mis töötavad füüsilises kontaktis keskkonnaga. Võistluse formaat meenutab Õpilased töötavad esmalt simulaatoril ja seejärel päris riistvaral.

Järgnevalt vaatleme mitmeid võimalikke probleeme robootikaprogrammis, millega tudengid võivad kokku puutuda. Siin on näited magistriprogrammi kandideerijatele:
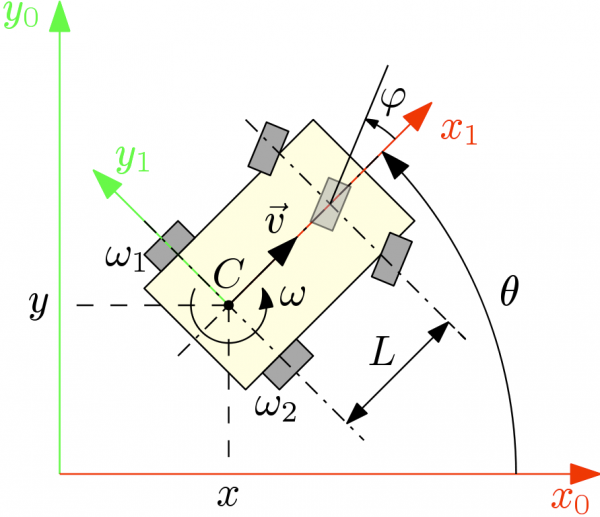
Näidisülesanne nr 1: Autokinemaatiline robot liigub lineaarkiirusega v = 0,3 m/s. Rooli pööratakse nurga w = 0,2 rad all. Kui roboti rataste raadius on r = 0,02 m ning roboti pikkus ja rööpmelaius on vastavalt L = 0,3 m ja d = 0,2 m, siis millised on iga tagaratta nurkkiirused w1 ja w2, väljendatuna rad/s?
Palun sisestage oma vastus kahe tühikuga eraldatud arvuna, täpsusega kaks kohta pärast koma, võttes arvesse märki.Näidisülesanne nr 2: Mis võib olla märk suletud süsteemi astatilisusest võrdlussignaali suhtes, kui analüüs viiakse läbi süsteemi struktuuriskeemi järgi?
aperioodiliste ühenduste olemasolu avatud vooluringis;
ideaalsete integreerivate lülide olemasolu avatud vooluringis;
võnkuvate ja konservatiivsete lülide olemasolu avatud vooluringis.
Siin on probleemid neile, kes kandideerivad magistriõppesse või residentuuri:
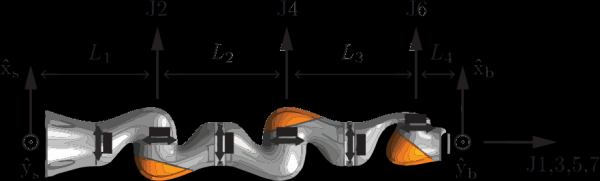
Näidisülesanne nr 1: Joonisel on kujutatud redundantne kinemaatika robotmanipulaator 7 pöördliigendiga. Joonisel on kujutatud roboti baaskoordinaatsüsteemi {s}, mille y-telje vektor on risti lehe tasapinnaga, koordinaatsüsteem {b} on ühendatud äärikuga ja on {s}-ga kollineaarne. Robot on kujutatud konfiguratsioonis, milles kõigi lülide nurkkoordinaatide väärtused on võrdsed 0-ga. Joonisel on näidatud seitsme kinemaatilise paari kruviteljed (positiivne vastupäeva suund). Liigendite 2, 4 ja 6 teljed on samasuunalised, liigeste 1, 3, 5 ja 7 teljed on identsed esialgse baaskoordinaatsüsteemi telgedega. Lüli mõõtmed on L1 = 0,34 m, L2 = 0,4 m, L3 = 0,4 m ja L4 = 0,15 m.
Näidisülesanne nr 2: Mobiilrobotite osakestefiltril põhineva samaaegse lokaliseerimise ja kaardistamise (SLAM) algoritmi stabiilsuse parandamiseks otsustasid arendajad kasutada uuesti valimi võtmise ratta algoritmi. Algoritmi täitmise teatud hetkel jäi mällu 5 "osakesest" koosnev valim kaaludega w(1) = 0,5, w(2) = 1,2, w(3) = 1,5, w(4) = 1,0 ja w(5) = 0,8. Milline on selle iteratsiooni efektiivse valimi suuruse minimaalne lävi, mis käivitab uuesti valimi võtmise mehhanismi? Kirjutage oma vastus kümnendmurruna ühe kümnendkoha täpsusega.
Kuidas valmistada. Oma teadmisi ja väljavaateid saad hinnata kontrollnimekirja abil. Robootika raja osalejad peavad:
- Tunne robotite modelleerimise põhimõtteid, tänapäevaste andurite omadusi ja sensoorse teabe hankimise meetodeid.
- Teadma ja oskama praktikas rakendada trajektoori planeerimise ja automaatse juhtimise ning sensoorse informatsiooni töötlemise meetodeid ja algoritme.
- Omab oskusi struktureeritud ja objektorienteeritud programmeerimises. On võimeline töötama robotsüsteemide arenduskeskkondades.
- Mõista tänapäevaste robotite arvutuskomponentide, ajamite ja andurite põhimõtteid, põhiomadusi ja tööfunktsioone. Omada oskusi katsete planeerimiseks ja läbiviimiseks.
Mis tahes ala "ülestõmbamiseks" võite pöörata tähelepanu Seal käsitletakse mõningaid varasemate olümpiaadide ülesandeid. Samuti on seal erialakirjandust, näiteks:
Rohkem raamatuid
Ja veebikursused Openedus, Courseras ja Edxis
Lisateavet olümpiaadi kohta:
Allikas: www.habr.com
