

חברה רובוט X Square פתח את הפרויקט XRZero-G0 — מסגרת חומרה ותוכנה לאיסוף הדגמות אימון, יצירת מדיניות בקרה ובדיקתן על רובוטים אמיתיים. הפרויקט מטפל באחד האתגרים העיקריים של בינה מלאכותית משובצת: איסוף יקר ואיטי של נתונים באיכות גבוהה באמצעות רובוטים פיזיים. במקום טלמטריה מתמדת מציוד אמיתי, XRZero-G0 משתמש בהדגמות המוקלטות על ידי בני אדם באמצעות ממשק מציאות מדומה ומערכת מצלמות, המשמשות לאחר מכן לאימון הרובוטים.
В דוח טכני של XRZero-G0 המחברים מתארים את המערכת כפלטפורמת חומרה ותוכנה שתוכננה במשותף לאיסוף נתונים ללא רובוטים והכשרת מדיניות בקרה. על פי הנתונים שלהם, השילוב של מערך גדול של הדגמות מוקלטות על ידי בני אדם עם כמות קטנה של נתונים מרובוט אמיתי מאפשר איכות דומה למערכי נתונים שנאספו אך ורק מרובוטים פיזיים. הניסויים מזכירים יחס של כ... 10 פרקים מוקלטים על ידי בני אדם עבור פרק אחד של רובוט אמיתי, מה שמפחית את עלות איסוף הנתונים בכ- 20 פעמים.
על תיאור עזרה בנושא אבטחת רשת, יחד עם XRZero-G0 שפורסם מערך נתונים G0 — מערך נתונים רב-מודאלי שנאסף באמצעות מסגרת זו. הוא כולל יותר מ שעות 2000 הדגמות מאומתות, מכסה שיטות חזותיות, מגע ושמע, ומכיל כ- 3000 משימות מניפולציה שונות — מפעולות בסיסיות ועד תרחישים סמנטיים מורכבים יותר. חלק ממערך הנתונים זמין ב-Hugging Face כ- XRZero-G0-3K.
המערכת מעניינת משום שהיא מנסה למסגר מחדש איסוף נתונים רובוטי לא כמו הפעלה ידנית של מכונה ספציפית ויקרה, אלא כמו תהליך ייצור ניתן להרחבה: המפעיל רושם פעולות בסביבה ידידותית למשתמש, הנתונים עוברים בקרת איכות, לאחר מכן משמשים לאימון מדיניות, והתוצאה מאומתת על רובוט פיזי. גישה זו יכולה להיות שימושית למחקר בתחומי רובוטים אוניברסליים, מניפולציה מיומנת והעברת מיומנויות בין פלטפורמות רובוטיות שונות.
תכונות XRZero-G0
איסוף נתונים ללא רובוט פיזי.
ההדגמות מוקלטות על ידי אדם באמצעות ממשק מציאות מדומה ואחיזה ייעודית, מה שמפחית את התלות בתפעול רובוטי יקר בעולם האמיתי. גישה זו מאפשרת צבירה מהירה של מספר רב של דוגמאות אימון.הקלטה רב-מודאלית של הדגמות.
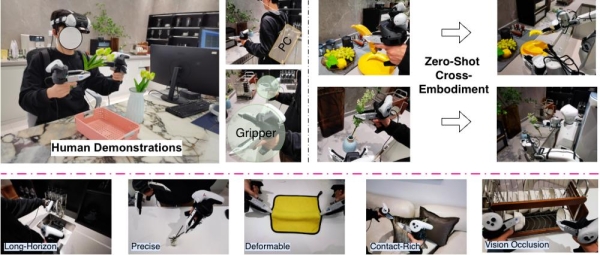
ה-XRZero-G0 משתמש במספר מצלמות, כולל מצלמת סקירה כללית ומצלמות בגובה פרק כף היד, כדי לקרב את ההדגמה האנושית של משימה כפי שתיראה על ידי הרובוט במהלך הביצוע בפועל. מערך הנתונים של G0 שפורסם כולל גם נתונים חזותיים, חשופים ושמעיים.ממשק VR ארגונומי.
המפעיל לא עובד ישירות עם הרובוט התעשייתי, אלא עם סביבת מציאות מדומה ידידותית יותר למשתמש ועם תופסנים מתחלפים. זה אמור לשפר את המהירות ואת החזרתיות של איסוף הדגימות.בקרת איכות בלולאה סגורה.
הנתונים עוברים דרך שרשרת איסוף ← אימות ← אימון ← הערכה. ברמת התצפית, נבדקת עקביות הנתונים ממצלמות שונות, ברמה הקינמטית, מסלולים שגויים נפסלים, והמבחן הסופי הוא שכפול המדיניות על רובוט פיזי.בדיקת התאמת נתונים.
המחברים טוענים כי היחס האפקטיבי של נתונים תקפים הוא בערך 85% בתנאים מבוקרים. זה חשוב מכיוון שברובוטיקה, הדגמות לא מתואמות היטב או בלתי אפשריות פיזית עלולות לפגוע בלמידה בדיוק כמו חוסר נתונים.חוקי ערבוב נתונים.
הפרויקט בוחן כיצד לשלב נתונים שנאספו ללא רובוט עם כמות קטנה של נתונים מרובוט אמיתי. המסקנה המעשית של המחברים: חלק קטן של אירועים בעולם האמיתי מסייע להסביר גורמים פיזיקליים כגון עיכובים, חיכוך ותכונות מפעיל, בעוד שאת עיקר השונות ניתן ללכוד מהדגמות זולות יותר שתועדו על ידי בני אדם.העברת התגלמות צולבת באפס ירייה.
XRZero-G0 שואפת להעביר מיומנויות בין רובוטים שונים ללא כוונון עדין נפרד עבור כל פלטפורמה. הדו"ח טוען כי ההעברה לרובוט הפיזי של היעד ללא כוונון עדין נוסף ספציפי לפלטפורמה.G0-מערך נתונים למחקר.
מערך הנתונים שפורסם מספק לחוקרים בסיס מוכן לאימון ובדיקת מודלים של מניפולציה. הוא מכסה אלפי משימות ומיועד לניסויים של אימון מקדים, העברה בין פלטפורמות התגלמות והרחבת מדיניות רובוטית.פרסום פתוח של קוד ונתונים.
מאגר XRZero-G0 מתארח ב-GitHub, והדוגמה XRZero-G0-3K זמין דרך Hugging Face. לפי Help Net Security, הקוד מתפרסם תחת רישיון MIT.
מקור: linux.org.ru
