

Company X Square Robot opened the project XRZero-G0 — a hardware and software framework for collecting training demos, generating control policies, and testing them on real robots. The project addresses one of the main challenges of embedded AI: the expensive and slow collection of high-quality data using physical robots. Instead of constant telemetry from real equipment, XRZero-G0 uses demos recorded by humans via a VR interface and a set of cameras, which are then used to train the robots.
В XRZero-G0 technical report The authors describe the system as a jointly designed hardware and software platform for robot-free data collection and control policy training. According to their data, the combination of a large array of human-recorded demonstrations with a small amount of data from a real robot allows for a quality comparable to datasets collected solely from physical robots. The experiments mention a ratio of approximately 10 human-recorded episodes for 1 real robot episode, which reduces the cost of data collection by approximately once.
On Help Net Security description, along with XRZero-G0 published G0-Dataset — a multimodal dataset collected using this framework. It includes more than 2000 hours verified demonstrations, covers visual, tactile and audio modalities, and contains about 3000 different manipulation tasks — from basic actions to more nuanced semantic scenarios. Part of the dataset is available on Hugging Face as XRZero-G0-3K.
The system is interesting because it attempts to reframe robotic data collection not like manually operating a specific, expensive machine, but rather like a scalable production process: the operator records actions in a user-friendly environment, the data undergoes quality control, is then used to train a policy, and the result is verified on a physical robot. This approach could be useful for research in the fields of universal robots, dexterous manipulation, and skill transfer between different robotic platforms.
XRZero-G0 Features
Data collection without a physical robot.
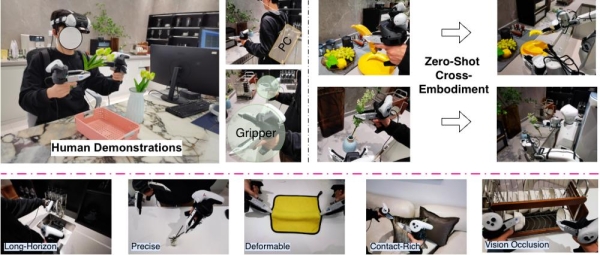
Demonstrations are recorded by a human using a VR interface and specialized grippers, reducing reliance on expensive real-world robot operation. This approach allows for the rapid accumulation of a large number of training examples.Multimodal recording of demonstrations.
The XRZero-G0 uses multiple cameras, including an overview camera and wrist-level cameras, to approximate the human demonstration of a task as it would be seen by the robot during actual execution. The published G0-Dataset also includes visual, haptic, and audio data.Ergonomic VR interface.
The operator works not directly with the industrial robot, but with a more user-friendly VR environment and interchangeable grippers. This should improve the speed and repeatability of sample collection.Closed loop quality control.
Data goes through a collection → validation → training → evaluation chain. At the observation level, data consistency from different cameras is checked, at the kinematic level, incorrect trajectories are discarded, and the final test is the policy replication on a physical robot.Data suitability check.
The authors claim that the effective proportion of valid data is about 85% under controlled conditions. This is important because in robotics, poorly coordinated or physically impossible demonstrations can impair learning just as much as a lack of data.Data Mixing Laws.
The project explores how to blend data collected without a robot with a small amount of data from a real robot. The authors' practical conclusion: a small fraction of real-world episodes helps account for physical factors such as delays, friction, and actuator properties, while the bulk of the variability can be captured from less expensive human-recorded demonstrations.Zero-shot cross-embodiment transfer.
XRZero-G0 aims to transfer skills between different robots without separate fine-tuning for each platform. The report claims transfer to the target physical robot without additional platform-specific fine-tuning.G0-Dataset for research.
The published dataset provides researchers with a ready-made baseline for training and testing manipulation models. It covers thousands of tasks and is designed for experiments with pre-training, transfer between embodiment platforms, and scaling robotic policies.Open publication of code and data.
Repository XRZero-G0 hosted on GitHub, and the sample XRZero-G0-3K Available through Hugging Face. According to Help Net Security, the code is published under the MIT license.
Source: linux.org.ru
